
基于智能手机传感器和phyphox 软件精确测量刚体转动惯量
2023-11-13 05:56贺梓凇焦梦鸽江宜航周建成雷衍连贾伟尧张巧明
实验科学与技术 2023年4期
贺梓凇,焦梦鸽,江宜航,周建成,雷衍连,贾伟尧,张巧明
(西南大学 物理科学与技术学院,重庆 400715)
刚体的转动惯量是刚体绕定轴转动时其惯性的量度[1]。刚体转动惯量用于建立角动量、角速度、力矩和角加速度等多个物理量之间的关系,其大小取决于刚体的形状、质量分布及转轴的位置。“刚体转动惯量的测量”是全国大多数高校在大学物理实验课程中必做的项目[2]。刚体转动惯量的测量仪器有三线摆、扭摆和刚体转动惯量仪等。其中,刚体转动惯量仪最常用,它测定刚体转动惯量的基本原理是利用光电门和智能计时计数器等装置测量转台转过一定角度所用的时间来计算刚体转动的角加速度β,再利用转动定理计算出转动惯量I。然而,传统测量方法不仅需要专业的设备(包括光电门和智能计时计数器),而且测量的数据有限(都是一些离散点),从而导致较大的实验误差。
智能手机具有小巧、易携带、功能强大等特点,已经广泛应用到人们的日常生活中。为了满足各种功能,智能手机集成了多种高精度、高灵敏度的传感器,如加速度传感器、光线传感器和微机电陀螺仪(即角速度传感器)等。笔者以安装了phyphox 软件的智能手机为测量工具,调用智能手机中的微机电陀螺仪对转动过程中的角加速度进行精确测量。实验结果显示:利用智能手机测量圆环的转动惯量与理论值的相对误差为1.91%(传统方法测量的相对误差为5.72%);而平行轴定理验证时的相对差值为0.94%(传统方法测量的相对差值为10.4%)。与传统测量结果相比,将智能手机应用于刚体转动惯量的测量,不仅能够提升测量精度,也能增强学生的学习兴趣,提高教学效果。
1 phyphox 软件的介绍
phyphox 是由德国亚琛工业大学设计开发的一款App,它能够调用智能手机中所含有的各类传感器以精确测量力、光、电、声等多种物理量,并能生成图表、导出数据[3]。其中,微机电陀螺仪利用科里奥利力在其内部产生微小的电容变化,测量此电容的变化并计算出角速度。本实验就是利用phyphox 的“陀螺仪”功能来测量角速度ω的[4]。
2 恒力矩转动法测转动惯量的原理
根据刚体转动定理[5]:
只要测得刚体所受的合外力矩M及该力矩作用下刚体的角加速度β,即可算出其转动惯量I。
假设以某初始角速度转动的空转台的转动惯量为I1,未加砝码时,在摩擦阻力矩Mμ的作用下空转台将以角加速度β1作匀减速转动,即:
将质量为m的砝码用细线绕在半径为R的塔轮上,并让砝码下落,系统在恒外力作用下作匀加速转动。若砝码的加速度为a,则细线所受张力为T=m(g-a)。若此时转台的角加速度为β2,有a=Rβ2。细线施加给转台的力矩为TR=m(g-Rβ2)R,有:
将式(2)和式(3)联立消去Mμ后,可得:
同理,若在实验台上加上被测试件后系统的转动惯量为I2,做匀减速转动和匀加速转动时的角加速度分别为β3与β4,则有:
由转动惯量的叠加原理可知被测试件的转动惯量:
由式(4)~式(6)可知,测得R及β1、β2、β3、β4,即可计算出被测试件的转动惯量。因此,精确测量定轴转动过程中的角加速度是关键。
3 实验案例分析
3.1 圆环绕中心轴转动惯量的测量
本文以圆环为被测试样(质量m=440.67 g、内径Rin=10.50 cm、外径Rout=12.00 cm),对比智能手机的测量结果和传统智能计时计数器与光电门相结合的测量结果,来验证智能手机提升大学物理实验精度的方案是否可行。
将手机用双面胶固定于转台中心位置,分别在摩擦力矩和合外力矩的作用下使转台+手机系统做匀减速和匀加速转动,测量转台+手机系统的转动惯量I转台+手机和转台+手机+待测样品系统的转动惯量I转台+手机+圆环,如图1 所示。具体有下面5 个步骤。
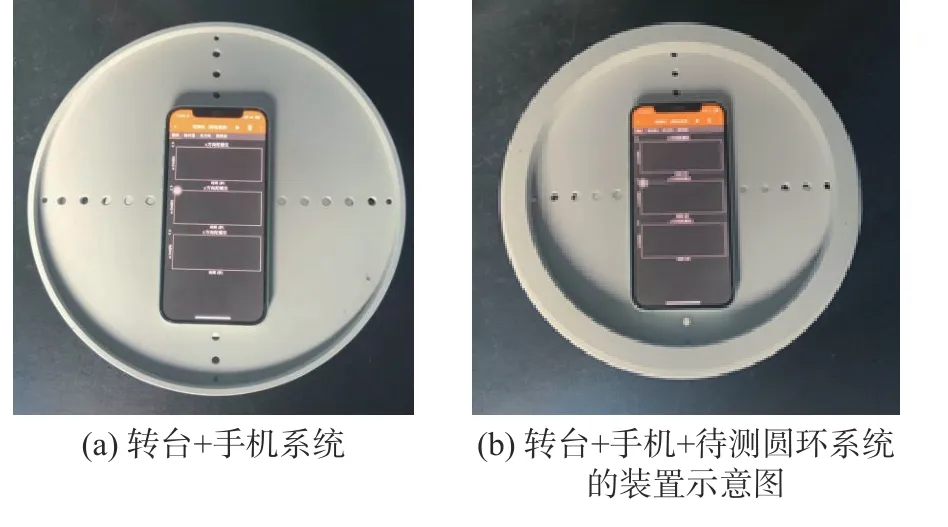
图1 圆环绕中心轴的转动惯量测定
1)利用手机中phyphox 软件里的陀螺仪功能,对匀减速和匀加速转动过程中的角速度进行测量。
2)导出phyphox 软件中存储的数据,利用数据处理软件(如MATLAB 或origin 等)拟合角速度和时间的关系,得到匀减速或匀加速转动的角加速度。
3)由式(4)可获得转台+手机的转动惯量I转台+手机;
4)将待测圆环固定于转台上,重复上面的步骤,测量空转台+手机+圆环系统绕中心轴转动的转动惯量I转台+手机+圆环;
5)由叠加原理可以获得待测圆环的转动惯量I圆环=I转台+手机+圆环-I转台+手机。需要指出的是,此时不用考虑放置手机对实验结果的影响,因为手机引入的额外转动惯量在式中直接相减后被消去。
3.2 验证平行轴定理
验证平行轴定理是本实验的重要内容之一。平行轴定理是指:就两个平行轴而言,刚体对于任意轴的转动惯量I等于通过此物体以质心为轴的转动惯量Ic加上刚体质量m与两轴间距离平方d2的乘积[6]。
利用智能手机验证平行轴定理时,首先需要将手机固定于转台的中心位置,并将质量为m(m=331.90 g)、直径为d(d=2.400 cm)的两个圆柱体对称地插入载物台十字架的插孔A和A′内(两者距中心圆孔的距离均为d1,这样转动体系在转动时较平稳,以减少误差),如图2 所示。其次,测量系统做匀减速和匀加速转动的角加速度,并计算出对应的转动惯量I初。然后,将两圆柱体对称外移相同距离并插入载物台十字架的插孔B和B′位置(两者距中心圆孔的距离均为d2),分别测量匀减速和匀加速转动的角加速度,并计算出对应的转动惯量I末。最后,将I末-I初与2m(-)比较,验证平行轴定理是否成立。
3.3 实验结果与分析
由于转台的转速在初始阶段还未达到平稳,我们选取中间时段的数据进行拟合和计算。此外,采用3 次等精度重复测量的方法以减小误差。受版面限制,这里只详细介绍转台+手机系统的转动惯量I转台+手机的测量数据及计算过程,其他测量和计算的方法相同。
3.3.1 转台+手机匀减速转动时的角加速度
转台+手机系统在摩擦力矩作用下将做匀减速转动。角速度随时间变化的原始数据如图3 中的黑色空心方框曲线所示。这一曲线的斜率即为匀减速转动的角加速度β1。利用origin 对其拟合求得β1的值如图3 中的红色实线所示。此拟合曲线的斜率为-0.316 6,表示转台+手机系统的匀减速转动的角加速度为-0.316 6 rad/s2。

图3 转台+手机系统做匀减速转动的原始数据及拟合曲线
3.3.2 转台+手机匀加速转动时的角加速度
将54.40 g 的砝码绕到转台下的半径r=3.50 cm的塔轮上,在砝码的拉力矩和转轴的摩擦力矩的共同作用下,转台将做匀加速转动,转台+手机做匀加速转动的角速度随时间的变化用蓝色空心圆的曲线表示,如图4 所示。利用origin 对其拟合可得匀加速转动的角加速度为2.229 8 rad/s2。

图4 转台+手机系统做匀加速转动的原始数据及拟合曲线
3.3.3 转台+手机的转动惯量I转台+手机的计算
用同样的方法,分别测量3 次匀减速转动的角加速度和匀加速转动的角加速度,如表1 所示,得到系统做匀减速转动的平均角加速度和匀加速转动的平均角加速度。将上述平均值、砝码质量(m=54.40 g)和塔轮半径(r=3.50 cm)代入式(4),得I转台+手机=7.098 7× 10-3(kg·m2)。

表1 利用智能手机测量空台转动惯量 I1实验数据记录表

表2 利用智能手机测量圆环转动惯量的数据记录表
3.3.4 待测圆环的转动惯量I圆环的计算
3.3.5 平行轴定理的验证
两圆柱初状态(距离转台中心d1=6.00 cm)时,匀减速转动和匀加速转动的角加速度分别为-0.228 6 rad/s2和1.988 2 rad/s2,如表3 所示。

表3 利用智能手机验证平行轴定理实验数据记录表
初状态时,两 圆柱的转动惯量I初=I转台+手机+两圆柱-I转台+手机=8.146 5×1 0-3-7.098 7×1 0-3=1.047 8×10-3(kg·m2)。同理,将两圆柱体对称向外移动4.50 cm(离转台中心距离d2=10.50 cm)时做匀减速转动和匀加速转动的角加速度分别为-0.177 0 rad/s2和1.541 5 rad/s2。由此计算出末状态的转动惯量I末=I转台+手机+两圆柱-I转台+手机=10.842 2×1 0-3-7.098 7×10-3=3.743 5×1 0-3(kg·m2)。因此,初末两状态的转动惯量差I末-I初=3.743 5×10-3-1.047 8×10-3=2.695 7×10-3(kg·m2)。由圆柱的质量(m=331.90 g)和初末两状态圆柱距中心的距离(d1=6.00 cm,d2=10.50 cm)有,2m(-)=2.464 4×10-3(kg·m2)。因此,以I末-I初的值为参考,I末-I初与2m(-)的相对差值为0.94%,平行轴定理得证。
3.3.6 传统方法测量I圆环和平行轴定理的验证
利用光电门+智能计时计数器测量转台转过kπ(k=1,2,3···)角度所对应的时间,然后利用匀加(减)速转动的角度公式()计算得到转台做匀减速转动和匀加速转动的角加速度分别为-0.150 0 rad/s2和2.191 4 rad/s2,如表4 所示。因此,转台的转动惯量I转台=7.907 0×10-3(kg·m2)。同理可得转台+圆环的转动惯量I转台+圆环=13.826 0×10-3(kg·m2)。需要指出的是,传统方法的测量时间范围与智能手机的测量时间范围大致相当。由转动惯量的叠加原理,得I圆环=I转台+圆环-I转台=5.919 ×10-3(kg·m2)。因此,利用传统方法测得的圆环绕中心轴的转动惯量的相对误差5.72%。
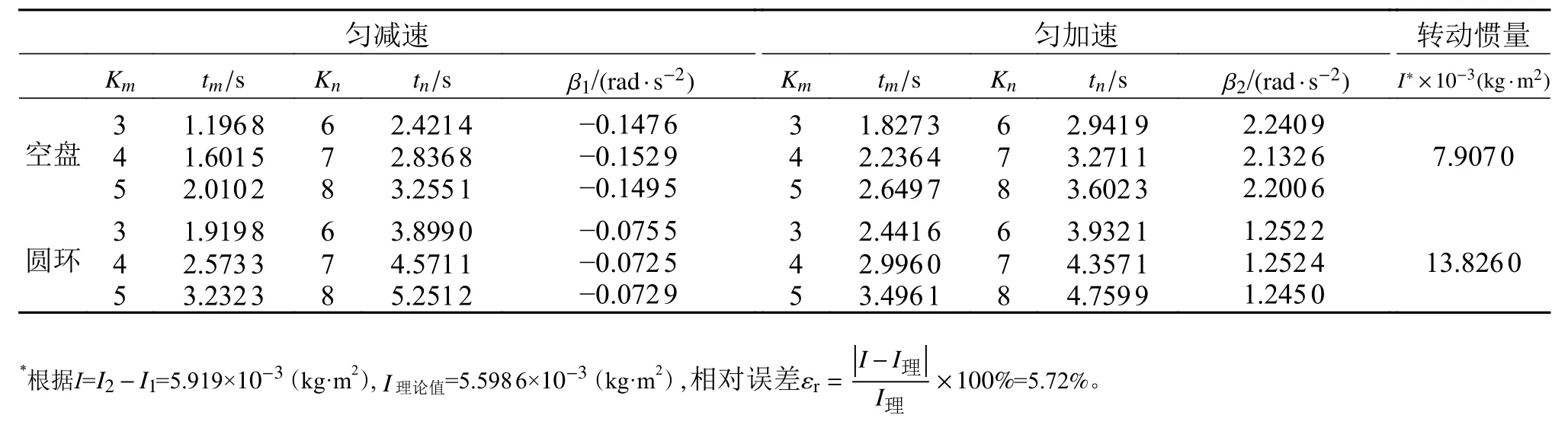
表4 采用传统光电门和智能计数计时器的测量结果
此外,利用传统方法来验证平行轴定理的实验结果显示,I末-I初与2m(-)的相对差值为10.4%。(受版面限制,数据未展示。)
3.3.7 结果分析
利用智能手机测得的圆环绕中心轴转动的转动惯量的相对误差为1.91%,而利用传统光电门+智能计时计数器的方法测得相对误差为5.72%。此外,利用智能手机为工具验证平行轴定理的相对差值为0.94%,而传统方法验证的平行轴定理的相对差值为10.4%。这些结果表明利用智能手机的测量精度明显优于传统方法的测量精度。
利用上述两种方法分别测量了圆盘和圆柱的转动惯量,实验结果都证明了利用智能手机作为测量工具的测量精度更高。这主要是因为传统方法测量的数据点有限,而phyphox 软件能每隔4 ms测量一次数据,记录的数据足够多,从而提高了测量精度[7-9]。
4 结束语
利用智能手机中各种高精度、高灵敏传感器对物理实验进行改进和改良是近年来的研究热点。在这一方面,中学物理实验教育进行了很多的尝试,并广泛应用于中学物理实验的教学和拓展实验中[10-11],但也受到了一些专家的质疑和反对,他们认为手机的引入往往会导致实验精度不高或者不可控、实验过程不确定性高等问题。他们还认为,智能手机在中学演示实验中尚可将就,但在精度要求更高的大学物理实验中并不合适。而在我们的工作中,首次通过严谨的实验设计和测量过程,系统地验证手机传感器确实可以有效提高测量精度(与传统方法相比测量精度提高了3 倍以上)。这一结果表明智能手机应用于更加严谨的大学物理实验中也是可行的。我们将会在未来的工作中,对智能手机的光、电等传感器在大学物理相关实验中的精度进行进一步验证,从而为大学物理实验的改进提供借鉴和参考。
猜你喜欢
高师理科学刊(2020年2期)2020-11-26
四川工商学院学术新视野(2020年2期)2020-08-13
液压与气动(2020年4期)2020-04-10
新课程·下旬(2018年10期)2018-01-28
北京航空航天大学学报(2017年1期)2017-11-24
物理实验(2015年10期)2015-02-28
计量学报(2014年3期)2014-06-07
振动、测试与诊断(2014年4期)2014-03-01
地震研究(2014年1期)2014-02-27
科技致富向导(2013年23期)2014-01-09
