
海底喷射式挖沟技术研究
2023-12-09 02:45张继旭傅文志宋昊政吴健行张颉
机械工程师 2023年11期
张继旭,傅文志,宋昊政,吴健行,张颉
(深圳海洋工程技术服务有限公司,广东 深圳 518054)
0 引言
随着海上系统(风电场、石油、天然气等)的发展,海底电缆和管道已成为连通海上领域的重要能源渠道。而近年来海底管缆数目的大量增加也大大增加了对挖沟作业的需求量。海底挖沟的做法始于20世纪50年代早期[1],目的是减少对海底设施[2-4]的相关风险。当海底管缆没有被充分保护时,它们可能会受到船锚、渔业活动、冰山甚至是从船上落下的集装箱的破坏。美国能源部对众多海域的1061条海底电缆发生故障的原因进行统计,结果显示82%的电缆故障是由于外部活动造成的损伤等破坏[2]。相关研究人员对海底电缆故障的调查结果[3]也佐证了这一点。
世界上第一台喷射式挖沟机出现于1950年[4],这种挖沟设备主要包括水上和水下两个组成部分:其中水下部分包括气举排泥管路、喷水框架和浮筒等;水上部分主要包括空压机和水泵等,并通过软管与水下部分连接。随着科学的不断进步,人们已经可以将高压水泵安装到挖沟机的海底装置上,在监测仪器的配合下利用电缆操作高压水泵吸排泥沙,这就是牵引式喷射挖沟机[5]。自推进式(ROV)喷射式挖沟机是指采用液压驱动的滚轮或推拉夹钳已铺设好的海底管道,或以跨坐在海底管线的履带装置获得推进的海底喷射式挖沟机。与牵引式和滑靴式相比,ROV喷射式挖沟对支持母船的位置精度要求低,受海域天气状况影响不大。目前研究人员对喷射式挖沟技术的研究主要集中于挖沟设备对软质海床土的适应性[6]、挖沟机在深水的工作效率[7]、管缆受挖沟影响损坏的风险及挖沟对海洋环境产生的影响等方面[8-9]。
本文首先对海底喷射式挖沟技术的背景,国内外常见的主流喷射式挖沟设备及其原理进行了综述,在此基础上介绍了ROV喷射式挖沟机QT1600在阳江青州三海上风电场海缆后挖沟的工程应用实例,并对35 kV海缆后挖沟的时效,220 kV海缆路由区挖沟机的工作效率与下刀深度、喷臂压力、反馈压力的动态关系进行了简要分析。
1 主流喷射式挖沟机设备
挖沟机设备类型及规格的选择取决于许多因素,而其中土壤性质是诸多因素中最关键的[6]。机械式挖沟机通常是硬黏土和粗粒度材料的最佳选择,然而其在软沉积物或较为陡峭的海床环境中保持稳定性仍存在一些困难:有研究表明,在非常软的土壤中,机械刀具的旋转机构卡在沙子或黏土中可能会造成损坏,导致了相对较高的维护成本[10]。喷射式挖沟机则在砂土和粉质黏土海床基础上具有优势,这主要得益于它自身的喷刀上喷嘴分布及高压水形成喷射流的特性。不同的喷嘴分布和水土相互作用则决定着沟槽的几何形状和挖沟效率。挖沟机选型的另一个不可忽视的方面是水深对于挖沟机挖沟效率的影响。随着工作水深的增加,拖曳式和机械式挖沟机往往会因依赖主作业船拖曳力而导致自身机动性不足从而使工作效率降低[11]。在这种情况下,需要一种保证挖沟作业稳定性的方法,即喷射式挖沟。此外,由于其效率和成本效益,这种方法被越来越多地被用来满足浅水和深水区(软土)海上作业的要求。图2给出了不同挖沟方法[12]在土壤强度、作业水深这两方面的能力概况。
根据实际工程和操作人员的不同要求目前也产生了诸多不同规格类型的喷射式挖沟机。典型代表诸如COOEC旗下的QT1600如图3(b)所示,宽5.0 m,长7.8 m,高6.0 m;质量(空气/水中)为47 t/15 t;破土强度≤100 kPa;工作水深为20~2000 m 。一般喷施式挖沟机在空气中的质量(当搭配有履带时) 从21 772 kg(T1000)到57 153 kg(UT-1)不等。图3列举了一些常见的喷射式挖沟机型号,其中UT-1(Ultra Trencher 1)由于2.1 MW的总功率及有效水泵(4× 375 kW)被认为是世界上最强大的喷射式挖沟机之一。此外,UT-1喷射臂的设计也让它在砂土和黏土中保持了不错的作业效率。表1总结了一些常见的喷射式挖沟机的主要规格和性能指标。
与ROV式挖沟机相比,滑靴拖曳喷射式挖沟机有埋深大(最大埋深可达4.5 m)、故障率低、经济性强的特点,但它在深水范围的应用十分有限。ROV式挖沟机需要DP2支持母船[13],也能够依靠自身动力在较深的水域工作。但它在滩海区作业及处理剪切强度大于100 kPa的土壤时,挖沟效率会大幅度降低:这主要是由于滩海区表层土软,淤泥土层厚度较大,挖沟机在正常的行进中不仅打滑甚至在许多路由区域出现履带下陷严重甚至无法前进的情况;其次是滩海区的浅水环境使得挖沟机部分电动机温度过高和其定位信标频繁失位[14]。
2 喷射式挖沟技术原理
2.1 挖沟原理
喷射式挖沟的基本原理是:利用喷射泵通过挖沟机喷射臂上的喷嘴形成高压水柱,将海床打散并进行稀释液化,再通过挖沟机抽吸臂将液化的土壤排出沟外从而形成沟槽,如图4[15]所示。
还有一种喷射式挖沟技术称为非接触式后挖沟,如图5[16]所示,它的工作机理是:使用大流量轴流泵抽水喷冲海床,通过水流将管底土壤泥沙带走,形成沟槽[16]。该方法最大的优势在于不会对海管表面造成接触性损坏。它在土壤剪切强度不超过40 kPa时效率较高,适合在软泥及粗沙地质条件下挖沟作业。但受限于其高流量的特性,不适宜在深水区域工作,且沟型质量难以控制,后期自然回填比较困难。
海床在经过挖掘后,一般会在一定时间内进行沟土自然回填过程(如图6),自然回填过程通常比较缓慢,而且沟槽的回填程度难以确定。如果回填土为黏土,由于这类土壤的渗透性较低,固结排水消耗的时间比较长,强度恢复将需要很长时间[17]。
2.2 挖沟过程
以ROV 式挖沟机QT1600为例,其主要有试挖沟、起始造坡、正常挖沟、结束造坡等施工步骤,下面对这些步骤进行简述。
2.2.1 试挖沟
定位工程师在定位图中标记出试挖沟的起点、终点和路由。选定挖沟起点侧半径200 m范围内的一个无相关作业及水下生产设施干涉的试挖沟区域;下放挖沟机,使挖沟机脱离Cursor,ROV进行实时监控,并回收Cursor至甲板;调整挖沟机的位置和艏向,艏向朝向挖沟行进方向,下放喷射臂,使喷射臂尖端缓慢接近海床;当喷射臂尖端接触到海床时,启动喷射臂的喷头;挖沟机沿着挖沟方向行进,同时操作挖沟机喷射臂由浅至深插入进行起始试造坡,移船跟随。
2.2.2 起始造坡
移船至正式挖沟起始点;调整挖沟机的位置和艏向,艏向朝向挖沟行进方向,挖沟机的中心线与管缆中心线对准;根据试挖沟记录,下放喷射臂使喷射臂尖端缓慢接近海床,同时注意观察管缆是否位于喷射臂中间,假如不是,则需要及时微调挖沟机自身左右的位置;当喷射臂尖端接触到海床时,启动喷射臂的喷头,挖沟机沿着挖沟方向行进。挖沟行进时,应根据造坡需要,调整喷射臂尖端的入泥深度以控制沟深。当目标深度为3 m时,造坡水平距离应控制在30 m左右为宜。
2.2.3 正常挖沟
当完成管缆路由起始造坡后,开始沿路由进行正常挖沟;随后保持起始造坡结束时的挖沟机前进速度挖沟,主作业船配合挖沟机行进速度沿管缆路由移动,确保挖沟过程脐带缆处于半松弛状态。
2.2.4 结束造坡
挖沟行进时不断回收喷射臂,调整喷射臂尖端的入泥深度以控制沟深,结束造坡控制在30 m逐渐减小挖沟深度至海床面,与起始造坡过程相反。关闭喷射臂喷头,回收喷射臂,回收挖沟机脐带缆,下放Cursor,下放ROV进行监控,提升挖沟机回到Cursor上,并锁定;启动提升绞车,将挖沟机提升到水面以上;调整A架角度,将挖沟机移动到船舶甲板上方;最后使其缓慢坐落在甲板上,并固定好。
3 实际案例应用
3.1 项目概况
如图10所示,阳江青洲三海上风电场海缆送出工程规划装机容量500 MW,拟安装单机容量6.8 MW的风力发电机组37台,安装单机容量8.3 MW的风力发电机组30台,一座220 kV海上升压站,配套建设陆上集控中心及租用运维码头。青洲三场址内风电机组发出电能通过35 kV集电海底电缆接入海上升压站,升压站通过采用2回220 kV三芯3×1000 mm2XLPE绝缘海底电缆送至陆上集控中心。

图1 不同水深下对海底电缆故障的调查结果

图2 不同挖沟技术的能力范围
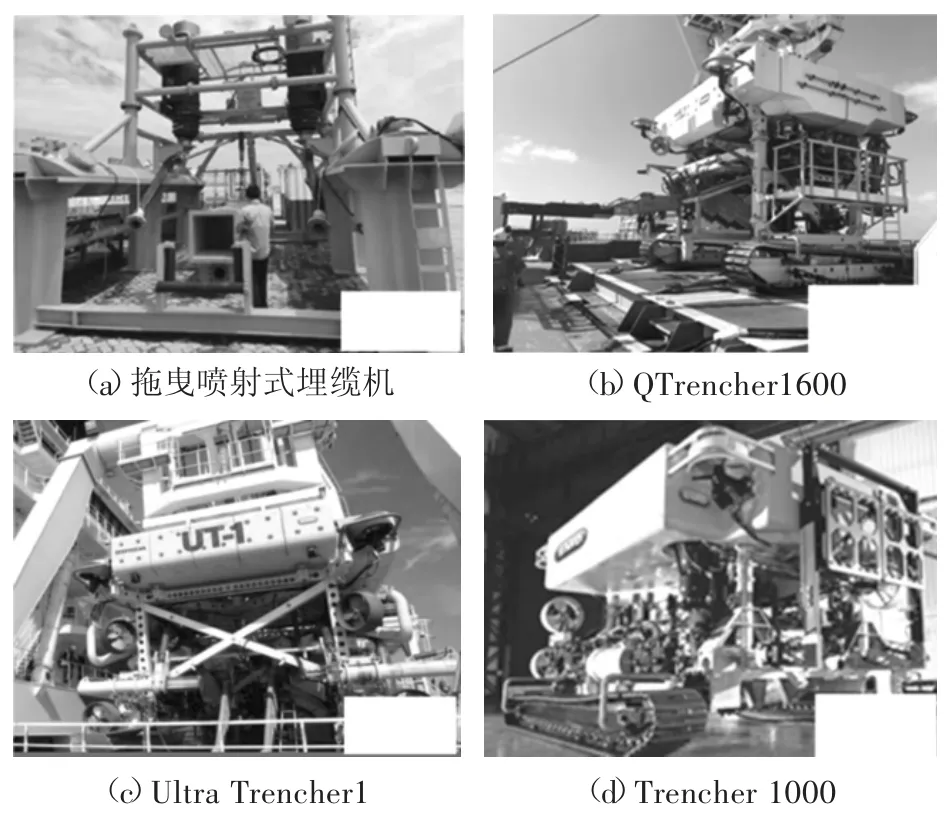
图3 常见的喷射式挖沟机型号

图4 喷射式挖沟方法的概念说明图

图5 非接触式后挖沟方法概念说明图

图7 挖沟机试挖沟示意图
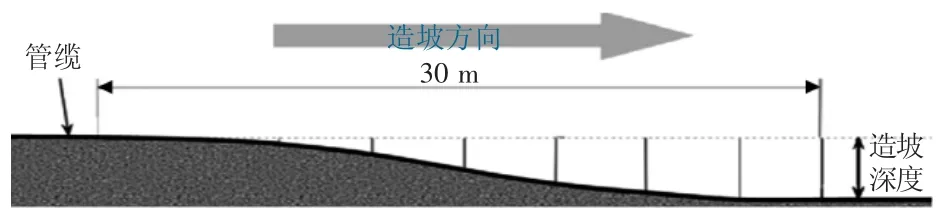
图8 造坡段示意图

图9 正常挖沟现场拍摄照片

图10 海缆路由示意图
本项目挖沟工作内容是对新建的35 kV海缆和西侧已铺69.301 km、220 kV海缆进行后挖沟保护作业,其中挖沟设备为ROV式喷射式挖沟机QT1600。
3.2 海缆参数
2回220 kV海缆从海上升压站输送电力至陆上集控中心。本项目需对西侧(HR)已铺海缆进行后挖沟保护作业。220 kV海缆(HR)设计路由长度为69.301 km。
35 kV海缆连接不同风机平台,共计15条,长度介于761~2569 m。需进行后挖沟保护作业的35 kV 海缆统计如表2所示。

表2 风机平台-风机平台35 kV海缆统计表
3.3 水深及海底坡度
220 kV海缆路由区除礁石区域外,整体路由区域地形特征表现为整体地势平缓、由北向南水深从0 m增大到约45.5 m。
35 kV集电海缆区离岸最近距离约55 km,水深在41~46 m之间,海缆沿线地形较为平坦,总体上海床自北往南缓缓降低。
3.4 土壤性质
220 kV海缆路由区从浅地层剖面和地质取样结果综合看,KP0+125 m至KP5+890路由区及KP9至KP9+525路由区是礁石区域和粗砂砾石底质区域。其它海域普遍存在表层淤泥-黏土-粉砂形成的薄海相沉积地层,厚度1~5 m。远岸段淤泥质土的厚度较大,有利于海缆的埋设施工。黏土层抗剪强度均值介于4.0~30.0 kPa,平均值约为13.5 kPa,大致呈现出由上至下逐渐增大的趋势。
根据35 kV海缆路由地球物理综合探测情况,浅地层剖面探测在海底面5 m内,未发现明显的反射层,推断5 m内未有较硬土层。
3.5 35 kV海缆后挖沟情况
以12根青州三300 MW风机平台-风机平台的区间缆为例进行时效分析,可得结果如图11所示,12根青州三300 MW区间缆平均净挖沟速率为7.2 m/min,而由于区间缆的作业顺序安排得比较合理,大部分区间缆移船就位的时间与总时间比值控制在一个合适的范围。区间缆35#-34#、24#-25#及43#-44#移船就位消耗时间较多是由于前期海缆铺设未做后调查,两端消耗段、甩弯段路由不准确,这使得挖沟机就位时需要ROV辅助找缆。12#-22#区间缆净挖沟用时消耗较大,主要原因是该段海缆路由弯曲、折曲部分较多,因而挖沟机在作业的过程中需要转船及调整艏向找缆。

图11 不同区间缆的时效分析
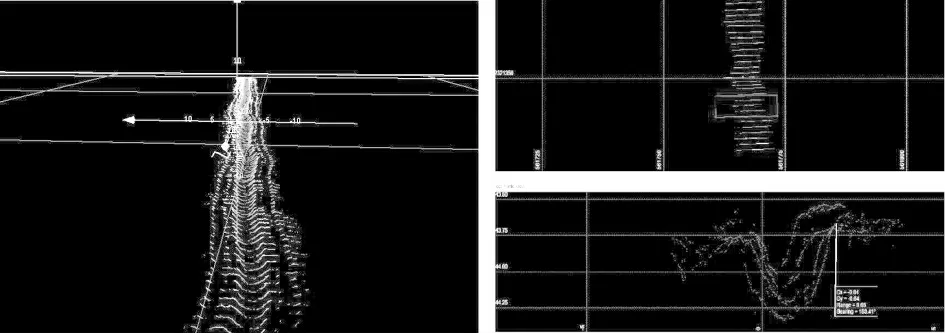
图12 区间缆47#-48#Delta-T后调查效果图
3.6 220 kV海缆后挖沟情况
220 kV海缆路由区选取KP33700-KP4129大约3 km的海缆路由段分析挖沟机的工作效率与下刀深度、喷臂压力、反馈压力的动态关系如图13、图14所示。

图13 挖沟机工作效率与下刀深度、喷臂压力的动态关系
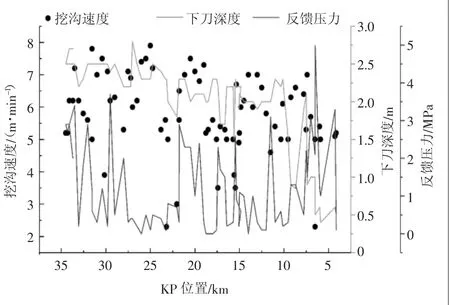
图14 挖沟机工作效率与下刀深度、反馈压力的动态关系
由图13、图14分析可知,同样土质、喷射压力、喷射流量和喷臂宽度情况下,喷射臂下深(即可挖沟深度)和挖沟速度成反比关系,特别是大于2 m挖深时,挖沟机行进阻力明显增加,速度下降较快。而从KP33500-KP22500的位置喷臂压力及挖沟机反馈压力均比较小可以看出,该区间段土壤硬度比较小,淤泥等结构性强的黏土成分居多。
总体来说,QT1600挖沟机一次性实现3 m挖沟的同时保证挖沟速度难度较大,且与土质有较大关系。为了进一步提高作业效率可以从以下几方面提高作业效率:1)仅挖直线段海缆,这样船舶和风机有较大安全距离,基本不需要过多调整艏向;2)规划好区间缆作业顺序,尽量减少来回移船和收放挖沟机时间;3)更换防滑(抓地)能力更强的挖沟机履带;4)在水下能见度比较差的情况下使用更强力的探缆设备。
4 结论
本文对海底喷射式挖沟技术的背景,原理及国内外常见的喷射式挖沟设备进行了综述,并在此基础上分析了ROV式挖沟机QT1600在实际工程中应用的案例。得到的一些主要结论如下:
1)喷射式挖沟作业通常是为了实现对海底设施的保护。无论是采用ROV式挖沟、滑靴拖曳喷射式挖沟或非接触式后挖沟技术,首先应当充分考虑土壤性质。喷射式挖沟机则在砂土和粉质黏土海床基础上具有优势,这主要得益于它自身的喷刀上喷嘴分布及高压水形成喷射流的特性。其次是水深环境。喷射式挖沟机的挖沟性能很大程度上取决于作业水深、土壤条件、设备规格及海底管缆的特性。当作业水深比较浅时,受环境土壤及自身设备的短板(部分电动机温度过高,挖沟机信标频繁失位)影响,ROV喷射式挖沟机作业效率普遍不高;当作业水深为1500~3000 m时,大部分ROV式挖沟机都能在砂土至硬黏土的土壤环境中实现3 m的最大埋深。
2)非接触式后挖沟技术最大的优势在于,它不会对海管造成接触损坏,同时设备结构简单适用性广;滑靴拖曳喷射式挖沟可达到的埋深比较大,同时对管缆的损伤也较小;自推进喷射式挖沟优势在于,它可以依靠自身动力前进且对支持母船的位置精度要求低,但在滩海区的作业效率较低[9]。对于地质变化比较明显的区域可以考虑采用不同类型的挖沟机进行协同作业。
3)ROV式挖沟机QT1600在进行实际挖沟作业时可以从以下几个方面提高工作效率:首先是设备配件方面,选择合适的挖沟机履带应对较恶劣的土质环境。在水下能见度不好或作业区水浅的情况下使用TSS350等探缆设备;其次是作业内容方面,选择合适的作业顺序及直线段海缆路由以减少调整艏向及移船时间。
猜你喜欢
浙江电力(2022年8期)2022-09-01
电瓷避雷器(2022年2期)2022-04-27
机械工程师(2021年7期)2021-07-15
中国新技术新产品(2021年7期)2021-07-05
中国新技术新产品(2020年24期)2020-02-23
中国海洋大学学报(自然科学版)(2018年11期)2018-10-15
电线电缆(2018年1期)2018-03-16
现代园艺(2017年22期)2018-01-19
船海工程(2017年4期)2017-08-09
中国海洋大学学报(自然科学版)(2017年7期)2017-06-05
