沉浮式养殖网箱自动化控制与管理系统研究
2023-12-23 03:15张世中张天时王兴兴袁世家
渔业现代化 2023年6期
张世中,张天时,王兴兴,袁世家,杨 波,赵 磊
(1 中国水产科学研究院黄海水产研究所,山东青岛 266071;2 青岛海兴智能装备有限公司,山东青岛 266200;3 三亚崖州湾农渔业发展有限公司,海南三亚 572000)
为实现新时期中国海水养殖业的可持续发展,减轻养殖对近岸海区的影响,急需实施深远海养殖战略[1]。深远海养殖时,外海风、浪、流会对浮式网箱养殖生物造成较大影响,沉浮式网箱利用波高随水深等差增加而成等比衰减的波浪理论,将网箱沉到水下一定深度[2-4],以降低风、浪、流对网箱及养殖生物的影响。但养殖网箱沉浮时易产生横移过大,导致网箱倾斜过大甚至倾覆的问题。此外,当遇到台风等恶劣天气条件时,养殖人员无法靠近网箱,需要不断提升深水网箱沉浮控制的自动化水平。
国内外学者做了较多关于深远海养殖网箱控制方面的研究。叶燮明[5]完成了升降式抗风浪深水网箱充气系统的设计。黄六一等[6]研究了网箱沉降时网箱浮绳框边长、沉降水深和网箱直径与网箱最大沉降倾角的关系。黄滨等[7]提出了控制网箱沉降倾角是升降网箱沉降的关键技术。刘永利等[8]开发出一种浮管内填充橡胶气囊升降网箱。张伟[9]将液压、PLC控制和Labview上位机监控技术融合,实现了根据养殖条件进行网箱的升降和转移。Kim等[10]开发了一种气控的刚性框架的网箱自动沉浮系统。Kitazawa等[11]提出了一种柔性软管填充于浮架内部的可沉浮式网箱。虽然可沉浮养殖网箱升降技术的研究众多,但是目前真正能够应用于生产的沉浮式养殖网箱自动化控制和信息集成系统较少。
本研究针对养殖网箱沉浮过程中,易造成网箱倾角过大易侧翻等的问题,开展基于比例积分微分控制(proportional-integral-derivative control,PID)技术,探究PID控制系统合适的参数,利用倾斜角度信号和控制算法来调节执行器,实现网箱倾斜角度的自动控制,并通过现场试验对性能进行验证,旨在为解决网箱沉浮自动化控制关键技术问题提供理论基础和技术支撑。
1 系统设计
1.1 开发过程
按照网箱沉浮自动化控制结构化的要求,进行的沉浮式养殖网箱整体结构和自动化控制系统的设计和开发,主要是采用调节浮筒的进排气控制,以及倾角传感器检测网箱的倾斜角度,然后基于PID控制技术,利用倾斜角度信号和控制算法来调节执行器,实现控制网箱的倾斜角度;通过设定阈值和优化控制器参数,使得当网箱倾斜角度超过阈值时,控制器将介入并调节平衡。这样有利于沉浮式养殖网箱的控制,可以将养殖网箱的浮沉简单自动化,使得用户可以自己操作,不用技术人员来进行操作,这样大大节省了人力成本。
为了实现深水网箱养殖控制和网箱养殖需求的自动化控制和管理需求,根据沉浮式养殖网箱自动化控制与管理系统功能需求,设计和编码了相应软件,形成了最终的沉浮式养殖网箱自动化控制与管理系统。本系统在设计工程中,对沉浮控制、饲喂控制、清洗网箱、GPS定位,以及水下摄像头监控、水质、流速、液位和压力等每个步骤的特性和功能都进行了充分的分解,并且对每个环节的管理操作进行了标准化,最终建立了沉浮式养殖网箱自动化控制与管理系统。
1.2 结构化设计和研究方法
1.2.1 网箱结构
按照网箱沉浮自动化控制结构的要求,进行的沉浮式养殖网箱整体结构的设计,主要由网箱(长11 m、宽11 m、深11 m)、带进出气管的长柱型调节浮筒(4个黑色大桶,长度3 m,直径1.2 m)、长柱型密闭的固定浮筒(4个白色小桶,长度0.95 m,直径0.5 m)和锚绳(80 m,网箱上4锚点由8条系框绳连接到网箱框架的4个角上)等结构构成,网箱整体结构和锚绳设计如图1所示。
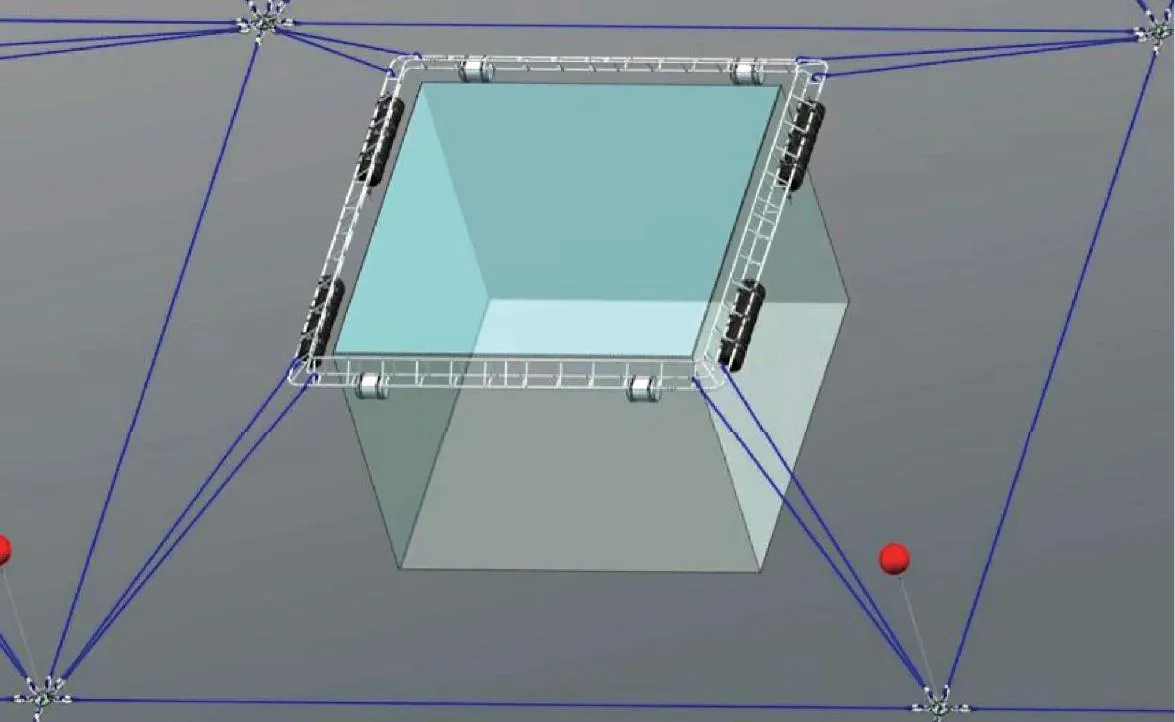
图1 网箱整体结构及锚绳示意图Fig.1 Schematic diagram of overall structure of cage and anchor rope
其主要功能为:通过增加和减少调节浮筒进排气量改变网箱的浮力,实现网箱的上浮和下沉。通过控制进出调节浮筒的进排气速度来控制网箱升降的速度。通过控制4个调节浮筒的进排量和速度减小网箱下沉和上浮时的倾斜角,防止网箱倾斜角过大或倾覆。
1.2.2 自动化控制系统设计
为解决养殖网箱下沉和上浮时容易发生养殖网箱倾斜角过大或倾覆的问题,基于PID算法,设计了一套利用比例阀和电磁阀控制网箱沉浮的装置。该装置主要包括:调节浮筒、进放气管道、比例阀、电磁阀和充气装置等,充气装置包括空气压缩机和柴油机。整个气路应设置有安全阀、单向阀、调压阀、放气阀、贮气阀、压力表、高压软管等元件,以确保进排气系统安全可靠的工作。
自动化控制系统设计如图2所示。由图2可知,每个调节浮筒配有电气比例阀,用于调节浮筒的进气压力以起到控制进气流量的作用,每个浮筒配有一个两通阀,用于关闭和打开浮筒的排气阀。当需要下沉操作时,浮筒内的压缩空气通过两通阀排出,是海水通过进水口进入,从而降低网箱的浮力。当需要上浮时,压缩空气通过电气比例阀向浮筒充气,使海水通过排水口排出,从而增加网箱的浮力。
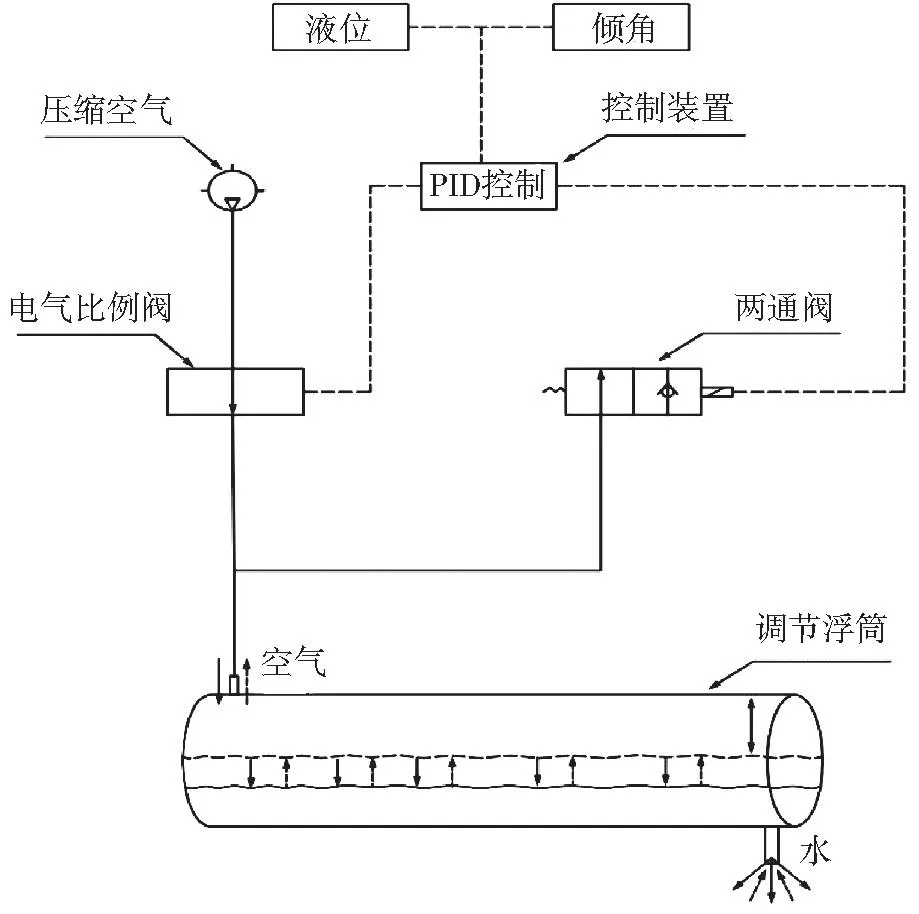
图2 自动化控制系统的工作原理示意图Fig.2 Schematic diagram of automatic control system
1.2.3 试验方法
(1)网箱结构
等比例缩小养殖网箱模型如图3所示。

图3 等比例缩小养殖网箱模型Fig.3 The down-scaling model of aquaculture cages
为了验证自动化控制沉浮及悬停可行性,制作了等比例缩小的网箱模型。本试验制作了等比例缩小到原来的1/6的沉浮式养殖网箱模型,网箱框架为钢材质,其长1.8 m、宽1.8 m;调节浮筒为高密度聚乙烯,其长0.5 m、直径0.2 m;固定浮筒也为高密度聚乙烯,其长0.16 m、直径0.08 m;锚绳长13 m,并在山东青岛即墨区青岛悦海湾海洋产业发展有限公司海域试验场地中模拟了沉浮式养殖网箱的实际工作环境,使用传感器、PID控制器和执行结构等技术手段来实现对装备的控制。
(2)浮重比试验
在网箱的沉浮过程中,起主要作用的就是浮力与重力,若浮力过于大于重力,会出现调节浮筒内进满水后无法完全下沉甚至无法下沉的情况;若浮力过于小于重力,则会出现调节浮筒内只进入少量水甚至未进水就开始下沉,因此,需对养殖网箱整体的重力和浮力进行设置,使其处在一个合适的比值。
浮力计算公式:
F=ρvg
(1)
式中:ρ为液体密度,v为排水体积,g为重力加速度。
网箱浮重比计算公式:
K=F/G
(2)
式中:F为网箱浮力,G为网箱重力。
(3)沉浮时间试验
沉浮式养殖网箱在应对台风、赤潮等自然灾害时,需要根据实际情况来控制网箱的沉浮时间和长短,因此开展沉浮时间的试验。由于网箱下沉和上浮的原理不同,所以其沉浮所需要的时间受到的影响因素也不同。上浮时间主要受比例阀控制进气口气量的控制,所以根据上浮时仅仅调节比例阀通气流量即可。而下沉时,其下沉时间除受到比例阀控制的排气气量影响外,还受到调节浮筒的进水口管径与其直径的比值影响。因此,需要对调节浮筒的进水口管径和其直径的取值提供参考值,并展开其对下沉时间影响试验。
(4)PID控制
PID算法是整个控制系统的核心部分, PID控制是根据给定值r(t)与实际输出值y(t)构成偏差:e(t)=r(t)-y(t)。将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量[11-14],对受控对象进行控制。
其控制规律为:

(3)
传递函数为:

(4)
式中:Kp为比例系数,Ti为积分时间常数,Td为微分时间常数;Ki=KP/Ti,为积分系数;Kd=Kp×Td,为微分系数。
比例(P)、积分(I)、微分(D)三个参数是PID控制的核心,在调整PID控制器参数时,可以根据控制器的参数与系统动态性能和稳态性能之间的定性关系,用经过一系列试验的方法来调节控制器的参数。该试验的控制方式按照赵宝明控制算法[15],进行P、I、D参数平行和正交设计。
PID控制原理如图4所示。

图4 PID控制原理Fig.4 Principle of PID control
2 结果与分析
2.1 浮重比试验
根据该网箱在浮重比最大值1.4,调节浮筒进满水后框架无法完全下沉;在浮重比最小值1.05时,调节浮筒内进入少量水框架便开始下沉。基于这两个值,设置在两值之间的梯度变化,进行试验,最终确定适宜浮重比为1.2。
2.2 沉降时间试验
沉降试验结果如表1所示。
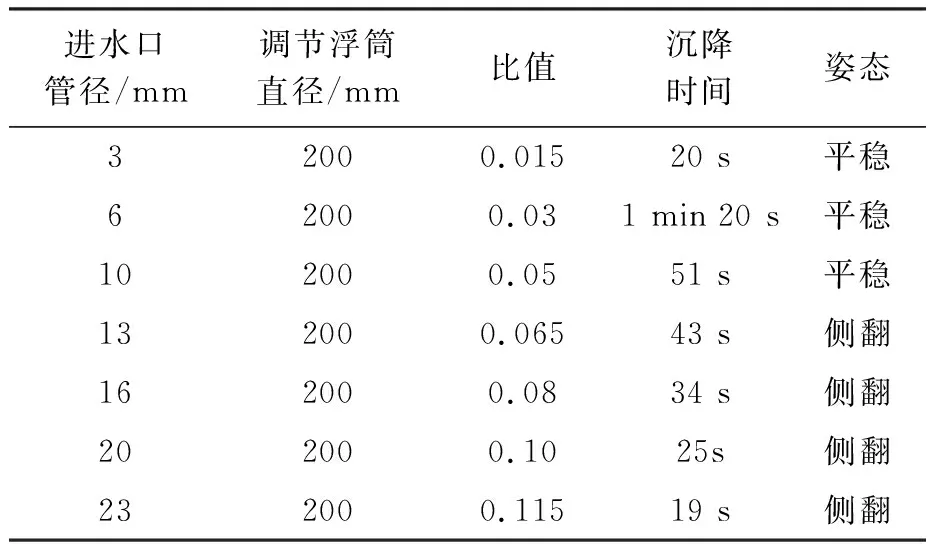
表1 沉降试验结果Tab.1 Results of sinking experiment
沉降试验中,为了研究调节浮筒进水口管径和直径取值和两者比值对网箱沉降时间和姿态的影响,在浮筒直径固定的条件下,设定进水口管径不同梯度值,设计了梯度试验,通过对比不同试验条件下的观测值,可以评估这两个因素对网箱沉降性能的影响程度,并确定适宜的比值。
2.3 PID参数调试试验
参数调整试验数据正交试验结果如表2所示。
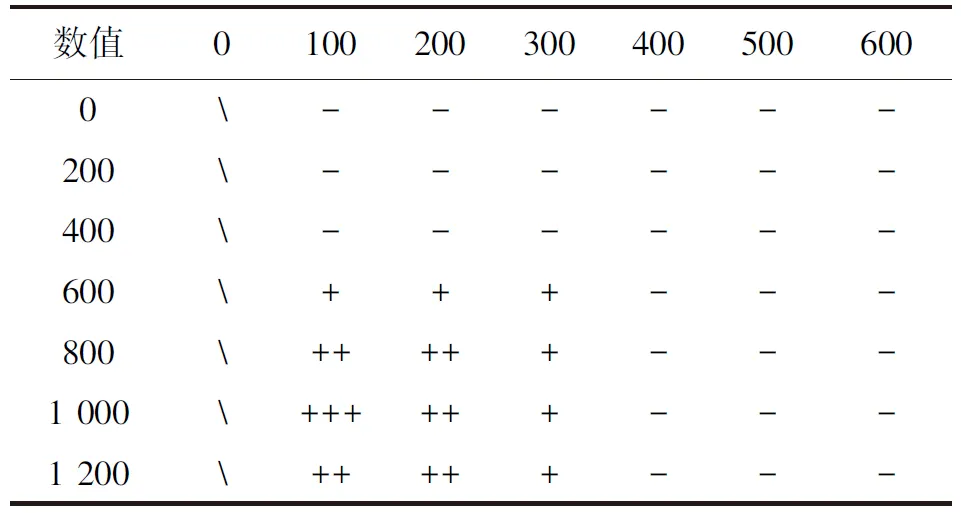
表2 参数调试试验结果Tab.2 Experimental results of parameter debugging
PID控制算法的参数的确定是本研究的核心问题之一,本研究根据PID控制原理、参数整定规律和控制算法等[13,16-22],将双轴倾角传感器对角放置以实现对四个调节浮筒的阀门进行单独控制,根据PID控制原理及参数整定规律,进行了多次平行及正交试验,不同参数下控制框架沉浮时会产生不同效果,P、I、D这三个参数不是线性相关的,但它们之间存在相互影响的关系。例如,增加P参数会增加系统的响应速度,但可能会导致系统的稳定性降低,此时可以通过增加D参数来提高稳定性;增加I参数可以消除系统的稳态误差,但可能会导致系统产生超调和振荡,此时可以通过减小P和D参数来降低超调和振荡。
2.4 沉浮式养殖网箱自动化控制和管理系统
根据沉浮式网箱自动化控制和配套设施的需求,编写出沉浮式养殖网箱自动化控制与管理系统相应的软件,软件导航中包含主页、用户、设置、报警等4个界面,其中主页界面包含了沉浮控制、饲喂控制、清洗网箱、GPS定位,以及水下摄像头监控、水质(温度、溶氧、pH)、流速、液位和压力等数据监测和控制功能,软件界面如图5所示。

图5 沉浮式养殖网箱自动化控制与管理系统主界面示意图Fig.5 The main interface diagram of automatic control and management system for sinking and floating aquaculture cages
该系统控制网箱上浮的过程是根据系统软件主页界面发送上浮指令到控制器,通过PID控制系统来控制送气电磁阀的开关将空压机的压缩空气通过管道输送空气到调节浮筒中,再经过网箱上的倾角传感器的信号反馈给控制器,保持网箱在可控的角度内慢慢上浮,根据液位感应器反馈的液位数据确定网箱上浮至要求水位。控制网箱沉降的过程也是根据系统软件主页面发送沉降指令到控制器,通过以上相同步骤将空气慢慢排出,保持网箱在可控的角度内慢慢下沉,并停留在要求水位中。其他辅助功能模块,如饲料饲喂、网衣清洗、水下摄像头监控、水质(温度、溶氧、pH)、流速等功能模块是为实现养殖过程中环境监测、饲喂和网衣清洗等的实时监测和控制,而GPS定位是为网箱发生较大距离偏移提供预警,而压力功能是为控制和调节浮筒内压力设计。因此,该系统获得以上辅助功能的数据后,将及时根据分析结果采取相应的措施,确保网箱养殖的安全和稳定。
2.5 对比分析
目前国内外对养殖网箱沉浮自动化控制仍存在如升降时倾角过大、沉浮的完成度不高、沉浮耗时无法精确控制、操作过于烦琐等问题,本研究在一定程度上解决了这些问题。首先,通过浮重比试验结果结果可以看出,在浮重比为1.2比值下,框架完全沉入水面之下后,调节浮筒内仍保留约1/4调节浮筒空间,可通过PID控制系统继续进行调节,保证了在实际生产中网箱沉入水面以下后若出现较大风浪或倾斜后PID控制系统仍有介入调节平衡的余地。该结果与刘永利等[8]通过调节气囊内气体量来控制网箱总浮力和总重力的大小实现网箱升降的技术是一致的。其次,从沉降时间试验结果可以看出,调节浮筒进水口管径和直径比值过大会导致进水过快沉降过快,PID控制系统不能及时介入调节且调节效果甚微;比例过小会导致进水速度过慢,虽有较好的平衡效果,但沉降时间过长,不能满足生产需要,其二者的适宜比值为0.03,并且试验条件下此比值沉降时具有良好的平衡控制效果。而从PID参数调试试验结果可以看出,P值为0时,系统的响应速度过慢,不足以迅速纠正系统偏差(倾斜实际值与目标值的偏差),导致系统调节过程极为缓慢,稳定性差;随着P值增大,会导致系统响应过快,出现振荡的现象,即控制量在目标值附近波动,无法收敛到目标值。I值过低时,会导致无法完全消除系统的静态误差,导致控制系统无法达到期望的稳定状态,过高会导致系统的响应时间延长,因为积分作用需要累积一定时间的误差才能对系统做出反应。该结果与蒙映峰等[23]在P、I、D算法参数对控制的影响中结果是一致的。用上述PID控制算法,经过一系列试验来调节PID控制系统的参数,最终确定试验条件下的P、I、D适宜参数分别为100、1000、0。在此参数下,在合理范围内改变框架的浮重比下,实现了网箱的平稳下沉和上浮,并且在浮重比1.2和无风浪情况下,实现了网箱几乎无倾斜的下沉和上浮。
本研究在以上试验结果的基础上,最终确定了沉浮式养殖网箱合理的控制策略和参数,建立了控制系统模型,采用PID控制算法对沉浮式养殖网箱的沉浮进行平稳控制。试验结果表明,该控制系统可以有效地控制装备的沉浮,实现了对沉浮式养殖网箱稳定性和安全性的提高。对比Kim等[10]对网箱自动化控制的研究,其所使用的阀门均为开关阀,通过调节充气压力进而调节进气速度,而本研究充气时采用比例阀,可在气压不变的情况下通过软件精确调节进气速度,从而大大提高了控制的精确度,同时还提高了沉浮式养殖网箱在不同使用环境下的容错率,便于项目的大范围推广。本研究编写出的沉浮式养殖网箱自动化控制与管理系统相应的软件,实现使养殖网箱沉浮控制更具有现代化、信息化、自动化的特点。
由于具有高度自动化特性的深海养殖网箱可以很好地解决深海养殖环境的复杂性问题,所以深海养殖设施的安全性和可靠性尤为重要。沉浮式养殖网箱自动化控制和管理系统的基本功能能够及时发现深海养殖过程中发生的故障现象,并且根据监控系统进行故障分析和提出解决方案,来确保养殖过程能够时刻处于高效的工作状态。养殖网箱自动化控制和管理系统的可靠,直接关系到深远海网箱养殖系统能否正常及高效的运行。因此深远海网箱自动化控制和管理系统己经成为现代化深海养殖系统不可缺少的重要环节之一[24-30]。该沉浮式养殖网箱智能化控制与管理系统实现了自动化控制与管理一体化设计,大大节省了水产品养殖成本,实现了当出现恶劣天气时,深远海养殖网箱自主下潜到海面以下的安全位置,这样节省了人力成本,也降低了海面出现恶劣天气时,渔民出海遇害的风险。
3 结论
设计并实现了沉浮式养殖网箱上浮下沉自动化控制,并建立管理系统。通过大量的平行、梯度和正交试验,确定了适宜浮重比为1.2,框架完全沉入水面之下后,调节浮筒内仍保留约1/4调节浮筒空间,保证PID可持续介入控制平衡;下沉时调节浮筒的进水口管径与其直径适宜比值为0.03,该比值下既保证了网箱合理的下沉时间,同时能为PID控制系统提供足够的控制时间;P、I、D的适宜参数分别为100、1 000、0,能够及时且稳定的进行控制输出,实现网箱平稳下沉和上浮。
猜你喜欢
中国海洋平台(2022年5期)2022-11-01
承德医学院学报(2022年2期)2022-05-23
房地产导刊(2022年4期)2022-04-19
中国交通信息化(2018年8期)2018-11-09
中国航海(2018年1期)2018-05-07
世界海运(2017年10期)2017-10-19
中国船检(2017年3期)2017-05-18
电子制作(2017年24期)2017-02-02
渔业致富指南(2016年12期)2016-11-11
湖南农业(2016年3期)2016-06-05