
基于下垂控制的微电网孤岛-并网平滑切换策略
2023-12-30 00:35王玫懿罗利文
电气自动化 2023年6期
王玫懿, 罗利文
(上海交通大学 电力传输与功率变换控制教育部重点实验室,上海 200240)
0 引 言
随着当今社会能源危机的日益严峻和人们用电需求的不断提高,以分散的小容量发电系统、负荷、储能系统及其保护装置构成的微电网逐渐成为国内外学者研究的热点[1-3]。并网与孤岛是微电网最基本的运行状态:采用孤岛下垂控制时,逆变器根据其输出功率构建微电网的频率和端电压,并根据负荷水平分配有功、无功分量;采用并网下垂控制时,逆变器测量并网点电压信息来实现电力调度并提供功率支撑[4-5]。当电网出现故障或负荷要求改变时,微电网将在两种运行模式间切换以保证负荷的持续供电,实现微电网并网和孤岛两种运行模式的平滑切换,可减小过渡过程时系统内部震荡,增强微电网的运行可靠性。文献[6]基于状态跟随提出一种由并网向孤岛状态平滑切换的方法,而并没有针对孤岛向并网模式转换时的过渡过程提出策略。文献[7]提出了利用电压传感器进行二次调频以实现与公共电网电压二次同步的方法,但存在无法双向响应的问题。
本文首先论证了微电网在孤岛、并网运行模式下的两种下垂控制算法,随后基于状态的实时监测跟随,设计了孤岛-并网双向平滑切换策略,实现了运行方式切换时系统的平稳过渡。
1 微电网孤岛/并网下垂控制
1.1 孤岛下垂控制
当微电网处于孤岛运行状态时,系统中缺少平衡节点,下垂控制(droop-control)能够实现负荷在各微电网之间合理分配[8],为微电网电压和频率提供支撑。传统的下垂控制公式如式(1)、式(2)所示。
f=f0-mp(P-P0)
(1)
V=V0-nq(Q-Q0)
(2)
式中:f、V为逆变器输出电压的频率和幅值;P、Q为输出有功、无功功率;f0、V0为频率和电压的额定值;P0、Q0为额定有功、无功功率;mp、nq为有功功率和无功功率的下垂系数。
此时的控制系统工作在电压源模式下(grid-forming工作模式),假设额定无功功率为0,可得图1的f-P和V-Q下垂特性
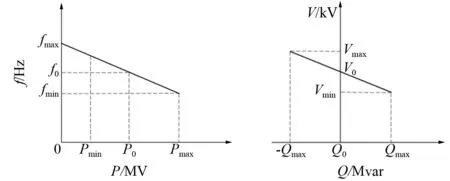
图1 f-P和V-Q下垂特性曲线
曲线。其中下垂系数为:
(3)
(4)
式中:Pmax为系统允许输出的最大有功功率;fmax、fmin为最大、最小频率;Qmax为最大无功功率;Vmax、Vmin为最大、最小电压。
1.2 并网下垂控制
当微网和大电网相连,系统中已有电压源。此时下垂控制应工作于电流源模式(grid-following工作模式)下,逆变器控制系统测量其与电网连接处的电压幅值和频率,并通过调制其输出功率来响应,这种控制方式被称作frequency-watt控制,它是一个自主控制,不依靠通信来操作。
并网时下垂控制的公式为:
(5)
(6)
本文研究考虑了下垂和死区值的P-f和Q-V下垂控制,如图2所示。
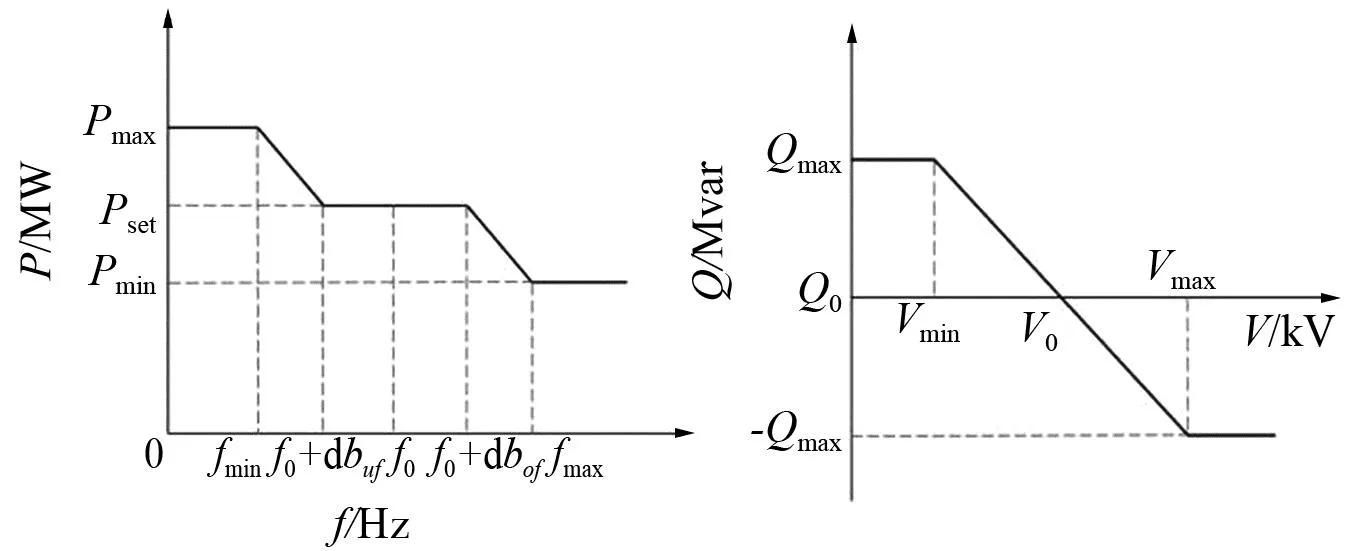
图2 P-f和Q-V下垂特性曲线
图2中:Pset为逆变器在稳定状态下的功率设定点;dbuf为低频死区,本文取值为-36 mHz;dbof为高频死区,取值为36 mHz。逆变器在功率下垂曲线上留有一定裕度,可以对一定范围内的过频、欠频事件作出反应。
2 控制器平滑切换策略
由于微电网在并网和孤岛两种模式下采用完全不同的控制方式,因此要实现逆变器与电网的平滑切换,需要逻辑开关与检测信号的配合。
传统切换控制结构如图3所示。K1和K2为逻辑开关,KG为并网开关。当微电网检测到KG断开,运行方式由并网转换到孤岛运行时,控制方式由grid-following切换为grid-forming。在实际切换过程中,由于两种控制方式分别独立运行,因状态不匹配而产生较大的暂态振荡,并网点PCC处的电压和频率会在短时间内发生跳变。根据国际通用微网运行标准[9],额定电压为UN的微电网在运行方式改变后其交流电压的允许波动范围为ΔU≤±7%UN,频率的允许波动范围为Δf≤0.1 Hz。在由孤岛切换回并网运行时,由下垂特性可知,微网输出电压和电网电压存在偏差,PCC两端电压不同步,并网瞬间将产生暂态震荡,对电网造成冲击。
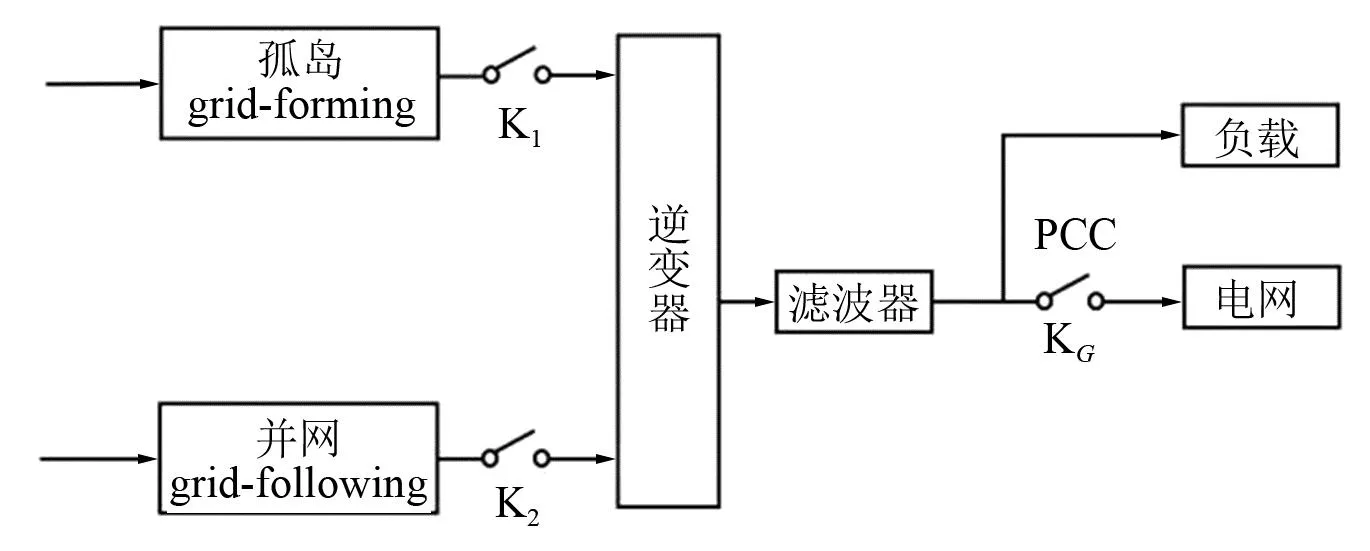
图3 传统并网-孤岛切换控制方法图
针对上述问题,本文提出了一种能够实现并网-孤岛双向平滑切换的控制方法,控制框图如图4所示。

图4 实现并网-孤岛双向平滑切换的控制方法图
为保证系统在由并网运行切换到孤岛运行时不产生较大的暂态振荡,在并网时将grid-forming控制的输出与grid-following控制的输出设计为一个负反馈作为grid-forming的输入,并保持跟随状态,保证两种控制输出状态的一致性。
当微电网由孤岛运行切换到并网运行时,微电网中的逆变电源在投入大电网之前必须满足其输出电压的频率、幅值、相位与系统电压相同,只有当并网点检测到的电压同时满足以上条件,才可以闭合并网开关KG。因此设计了一个同步并网下垂控制器,通过锁相环计算出并网点两端三相电压的幅值、频率和相角。根据国际通用标准和本文研究设计的微电网实际容量情况,在由孤岛向并网转换时,设计只有满足电压差值ΔU≤±7%UN,且频率差值Δf≤0.1 Hz,且相位差Δθ≤5°时,给予KG闭合信号,微电网进入并网运行模式。
微电网的电压和频率同步采用PI调节控制,表达式如下:
(7)
(8)
式中:Ugrid、fgrid为电网侧电压的幅值、频率;UPCC、fPCC为微电网并网点处电压的幅值、频率;kup、kui、kfp、kfi分别为电压、频率PI控制的比例、积分系数。
在频率稳定后,相角差值即变为定值,将ΔUsyn、Δfsyn分别叠加在下垂控制式(5)和式(6)中,电压、频率参考值变为:
V0_new=V0+ΔUsyn
(9)
f0_new=f0+Δfsyn
(10)
以上控制方法通过适时切换的逻辑开关来实现:系统离网时,开关K2和K3闭合,开关K1、K4和K5断开;系统并网时,开关K1、K4和K5闭合,开关K2和K3断开。当检测到并网信号时,相应的逻辑开关动作能够实现平滑切换,增加了系统的运行可靠性。
3 试验验证与分析
为验证所提出的并网-孤岛双向平滑切换控制方法在实际运行中的有效性,在MATLAB/Simulink平台搭建了微电网模型,验证所提出控制方法的效果。
3.1 并网切换至孤岛运行仿真
假设在运行模式切换过程中,微网数量与负荷不变,额定电压380 V、额定频率50 Hz的微电网在前1 s内与大电网连接运行,在t=1 s时刻并网开关KG打开,微电网脱离大电网转为孤岛运行状态。在微电网运行模式切换时,采用传统切换方法与本文双向平滑切换方法得到的仿真结果如图5所示。
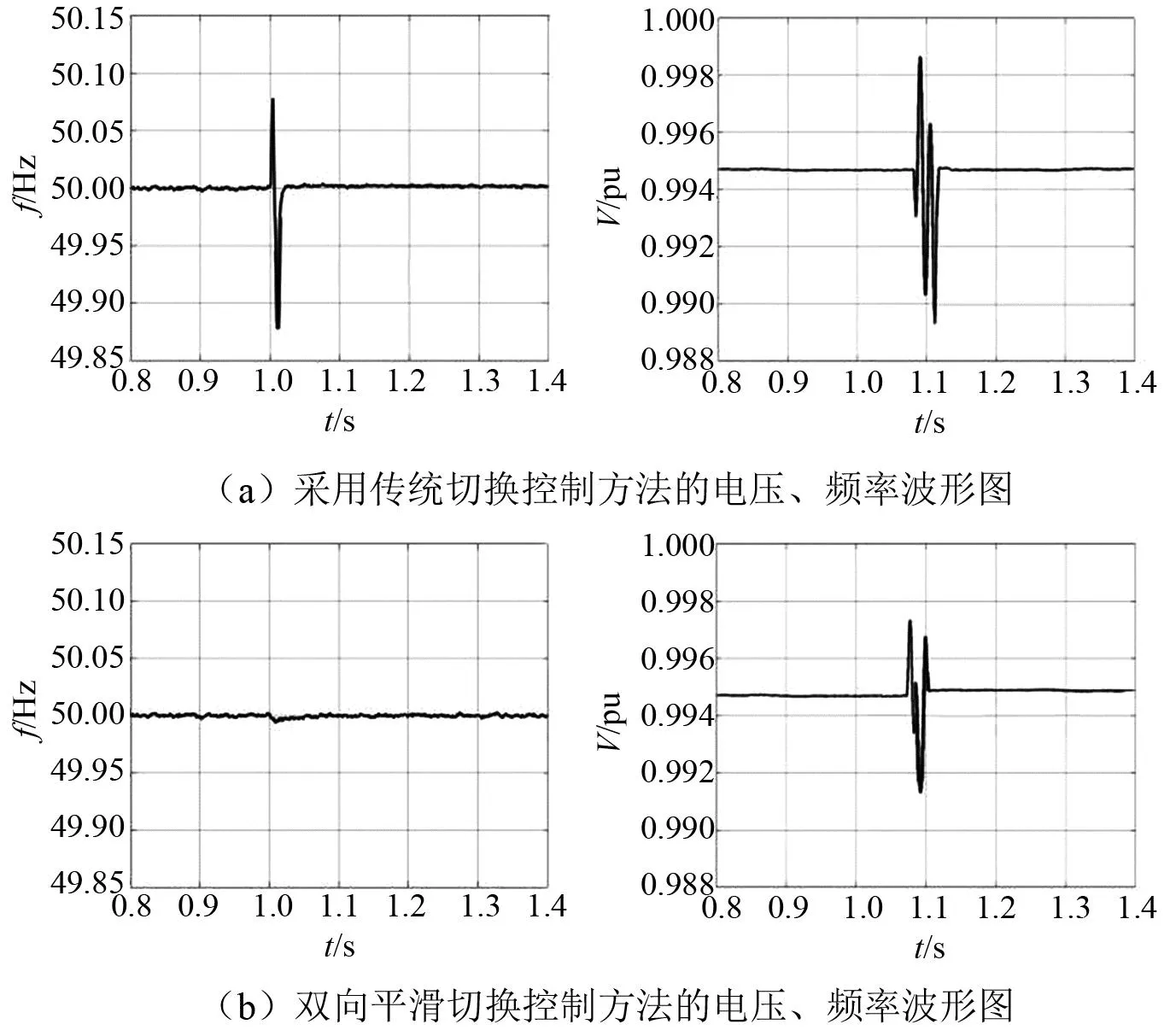
图5 采用不同切换方法的系统运行结果
如图5(a)所示,微电网并网运行时频率保持50 Hz不变,t=1 s时切换为孤岛运行,经过短时间波动,频率恢复到50 Hz并保持稳定,频率最低点约为49.88 Hz;并网时电压约为0.995 p.u.,模式切换后经过短时波动恢复并保持稳定,波动最高约为0.999 p.u.,最低约为0.991 p.u.。此时频率上下波动较大,变化幅值超过0.1 Hz,不满足电能质量要求。
图5(b)为采用双向平滑切换方法后的电压、频率波形图,频率的震荡明显减弱,电压波动得到明显改善,实现了由并网向孤岛的平滑切换。
3.2 孤岛切换至并网运行仿真
为验证本文设计的同步并网控制器效果,假设微电网在前1 s运行在孤岛模式下,在t=1 s时刻收到并网信号,启用并网同步控制器,当并网点两侧的电压、频率满足并网条件后,闭合并网开关KG。以电压A相为例,同步过程如图6所示。系统在1 s时运行同步并网控制器,同步过程中PCC两端电压的幅值与相位不断缩小差距,在1.08 s左右实现同步,开关KG闭合,微电网进入并网运行。在孤岛切换至并网的过程中,并网点处的电压、电流均未发生较大突变,没有产生影响系统运行的暂态过程,实现了由孤岛向并网的平滑切换,验证了本文方法的有效性。
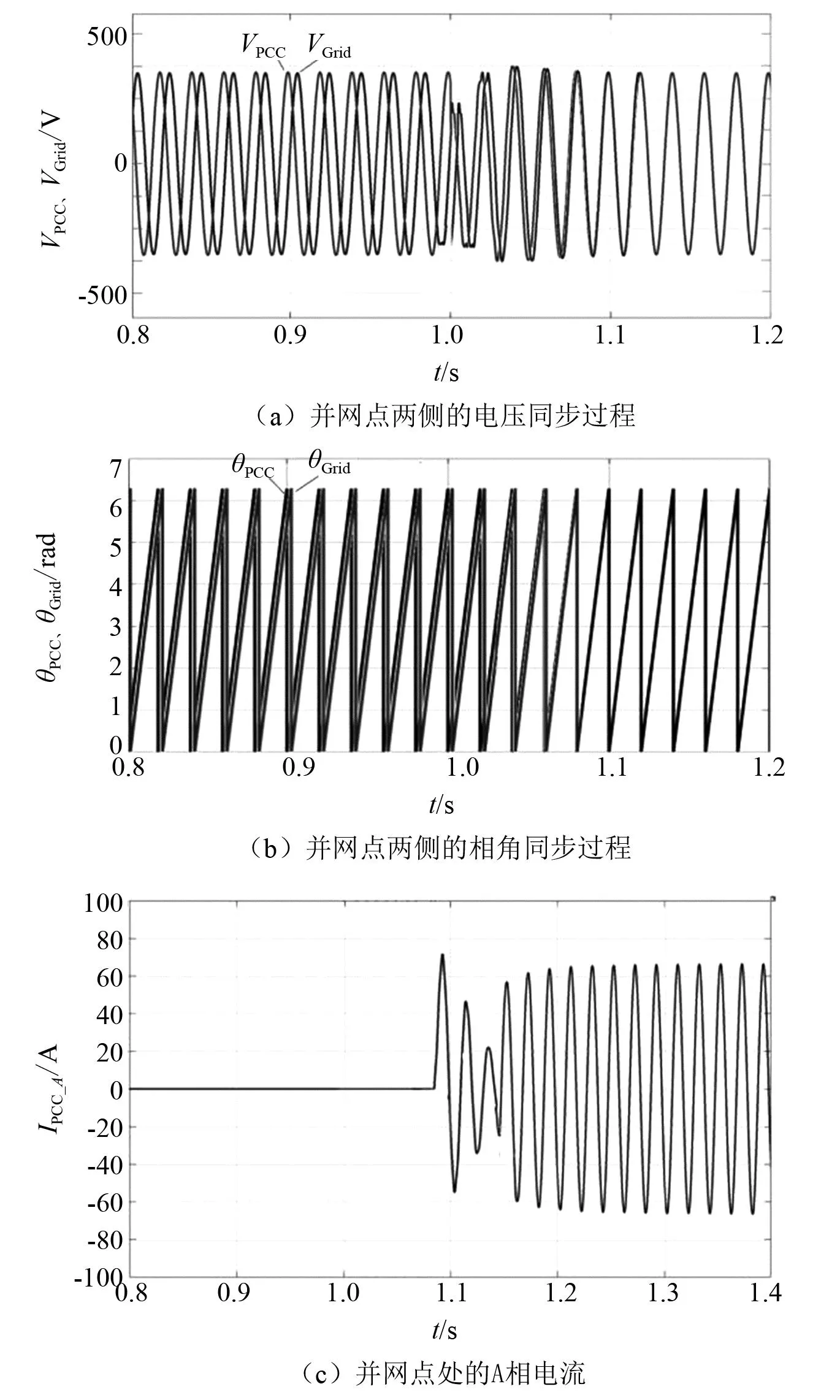
图6 微电网由孤岛切换至并网的仿真波形
4 结束语
为保障系统的安全稳定运行,必须保证微电网在孤岛和并网两种运行方式切换时的稳定性,鉴于传统控制方法的直接切换存在一定的缺陷,本文对并网-孤岛过渡采用双向平滑切换控制方法,在MATLAB/Simulink平台搭建微电网模型。仿真结果表明,采用了双向平滑切换控制方法的微电网在运行模式切换时,电压、电流、频率的波动范围均显著减小,保证了系统运行的可靠性。
猜你喜欢
出版人(2022年11期)2022-11-15
新世纪智能(语文备考)(2020年9期)2020-12-31
新高考(英语进阶)(2018年1期)2018-04-18
电子制作(2017年7期)2017-06-05
创新作文(小学版)(2017年33期)2017-04-04
电测与仪表(2016年15期)2016-04-12
通信电源技术(2016年5期)2016-03-22
电源技术(2015年5期)2015-08-22
电源技术(2015年9期)2015-06-05
电测与仪表(2015年7期)2015-04-09
