
色块苗软薄容器基质机械化装填关键技术探讨
2024-01-03 03:32楼婷婷张加清
农业开发与装备 2023年11期
王 涛,费 焱,楼婷婷,张加清
(金华市农业科学研究院,浙江金华 321017)
0 引言
色块苗,观赏苗木,用于布置绿化景观的彩叶植物。色块苗种植是园林绿化、公路绿化应用中最常见的作物配置方式,抗性强、适应性强、群体效果好,色块苗的兴起拉开了绿化苗木“色叶时代”的序幕,具有十分重要的经济价值和研究价值[1]。目前,色块苗常用的颜色主要有红黄绿三种,品种有红叶石楠、金森女贞、金叶六道木、金边黄杨等。近年来,国家省市各级政府相继提出了“美丽中国”“城市彩化”“彩色浙江”等建设内容,这些建设内容的提出大大增加了色块苗的市场需求空间,色块苗产业迎来新的发展机遇。
目前,色块苗的快繁以扦插繁殖最为广泛,既可以经济地利用繁殖材料进行大量育苗和多季育苗,又可以较好地保持母体的优良性状,迅速成苗[2-3]。色块苗的快繁需扦插于装有基质的软薄容器中,因此色块苗快繁的头道工序即为软薄容器基质装填,作业量大、强度高,且普遍存在“赶时装填、赶时扦插”的情况,而与之矛盾的是软薄容器基质装填装备供给不足,严重制约了色块苗产业的发展。因此,基于国内外基质装填机的研发现状,在分析色块苗软薄容器机械化装填存在问题的基础上,提出提升改进色块苗软薄容器基质装填装备的关键技术研究方向和建议,对加快色块苗机械化生产发展具有重要意义。
1 国内外基质装填机研发现状
国外发达国家容器育苗技术从20世纪50年代中期就已经开始,到了70年代初期,容器育苗相关的技术和设备已获得了积极推广和较为广泛的应用。目前,荷兰、德国、比利时等国家均已有成熟的基质装填机,具有工作效率高、性能稳定可靠、自动化程度高、适应范围较广的优点,其中典型的机型主要有Javo-Standar、Demtec-Smart、Maver-Tm2700XL等(图1,图2,图3),部分机型已完成了与定植移栽装备的无缝对接[4-6]。从国外进口的部分基质装填机的生产应用情况来看,存在价格昂贵、体积庞大、动力要求大、维修困难、与色块苗软薄容器装填环节不匹配等缺点,在色块苗基质装填作业环节尚未有应用的案例。

图1 Javo-Standar型基质装填机

图2 Demtec-smart型基质装填机
图3 Maver-Tm2700XL型基质装填机
针对基质装填作业量大,装填机空白的情况,国内一些科研单位和企业对基质装填机开展了初步的探索和实践[7-10],如沈阳农业大学开发了一种多组叠摞容器同时自动分离装置(图4),农业农村部南京农业机械化研究所开发了一种容器基质装填机(图5),顺意科技开发了一种半自动容器基质装填机(图6),台湾亦祥公司开发了一种可装填软质容器的基质装填机(图7)。然而,就总体情况而言,目前国内的基质装填机械化程度还处在一个较低的水平,仅仅是在示范育苗基地实现了无病毒容器育苗的装填机械化,与容器育苗相关的机械设备至今依旧没有形成规模化的生产体系和商业化推广。现阶段基质装填机技术研究主要集中在PE硬质容器上,多为固定式基质装填机,自走式的基质装填机几乎没有报道,且未能充分考虑作业环境复杂性,缺乏理论分析,对关键作业部件缺少系统性研究,自动化、智能化水平较低,通用性相对较差。
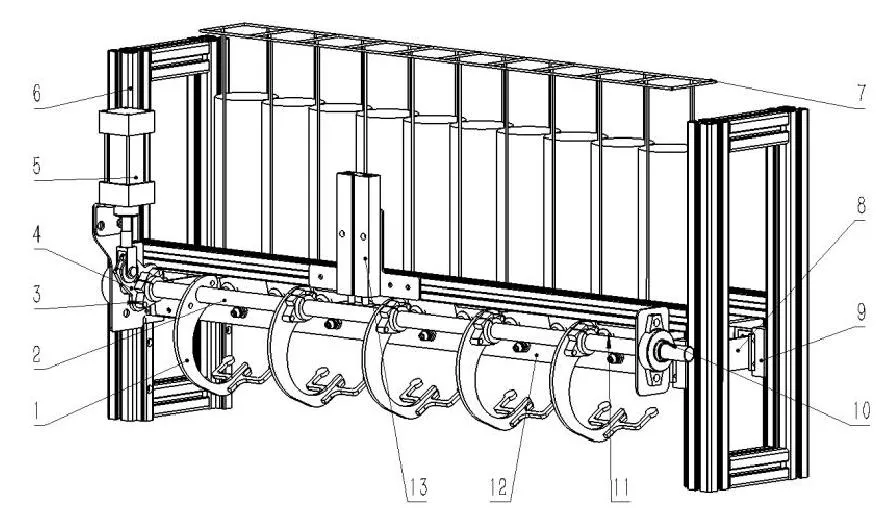
图4 多组叠摞容器同时自动分离装置结构图
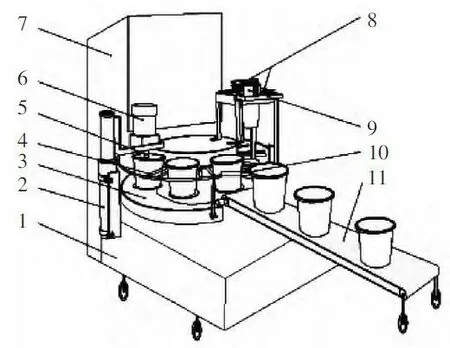
图5 容器基质装填机结构图

图6 顺意科技半自动容器基质装填机

图7 台湾亦祥可装填软质容器的基质装填机
2 机械化装填机存在问题
2.1 农机农艺匹配性差
目前,色块苗扦插快繁技术一般采用小规格的黑色塑料软薄容器,摆放后的容器相互紧挨,亩均摆放数量多达15 000~20 000个,因此要求色块苗容器基质装填机须为自走式,在基质装填的同时完成容器就地摆放在地面上。然而,目前的基质装填机多为固定式的,放在固定场地进行装填作业,之后需要人工将装填好的容器搬运摆放在相应田块地面上,此环节需要大量的劳动力,且作业过程繁琐,因此现有的基质装填机机型无法满足色块苗容器扦插快繁的生产模式。
2.2 复杂环境适应性差
色块苗软薄容器的基质装填作业环境使得在装填作业中存在地块小、地垄弯曲、平整性差等一系列问题,导致首先现有的基质装填机机型基本没办法适应。首先,色块苗地块尺寸普遍较小,在机械化装填作业时要频繁掉头,从而要求装填机动力底盘尺寸要尽可能小,再加上栽培模式的限制,使得装填机只能选择较小的动力底盘,从而存在现有动力底盘不适应的难题。其次,色块苗栽培地块不规则、土地平整性差,一般采用微耕机进行开沟起垄,作业时容易走弯,地垄直线度较低,由此导致作业时基质集拢提升和容器摆放与地垄相对位置存在偏差,导致基质集拢和容器摆放困难,影响装填作业效果。
2.3 软薄容器分离性差
色块苗扦插快繁使用的容器为小规格多层叠摞黑色软薄容器,单个无法依靠自身定型,现有拨叉式机构无法实现容器自动分离下落,需从原理上重新对容器自动抓取码放机构进行创新,综合分析机械分离和真空吸附分离现有两种技术方案的优缺点,选出可行性最高的方案;且黑色软薄容器无法单个直立,在装填和垄上摆放过程中难以保持姿态稳定,因此与硬质容器装填存在较大差异,需配套设计软薄容器网格定位扶持装置进行直立定位和基质装填,保证基质装填和容器摆放质量。
2.4 经济效益提高不明显
容器基质机械化装填除了要解决劳动力短缺的问题,更需要实现质量和效率的提升,最终达到提高种植户经济效益的目的。然而,现有的基质装填机机型对大多数种植户来说,经济效益提高并不明显。首先,色块苗地块尺寸普遍较小,在装填作业时基质装填机需要频繁掉头,大大影响装填作业效率。其次,色块苗软薄容器机械化装填作业工况复杂,容易造成在装填过程中发生容器侧翻、容器装填密度不一致、作业堵塞和扭矩过载等问题,而作业过程中缺少作业参数采集监测,需要工作人员停机检测,大大降低工作效率。此外,在环境较差的条件下装填质量未能达到人工装填质量,影响色块苗扦插快繁质量,进而造成种植户经济损失。
3 装填装备提升改进的关键技术
3.1 装填机专用动力底盘开发
动力底盘是自走式农机装备的重要组成部分,其性能直接影响整机的作业质量和效率。近年来,国内外学者基于“高效、智能、环保”等角度,在行走驱动、动力换挡、线控转向等方面取得了创新性成果,可为装填机专用动力底盘开发提供技术借鉴。针对色块苗软薄容器基质装填复杂作业工况和底盘动力不足问题,建立田间土壤与专用动力底盘物理力学耦合模型,优化专用动力底盘驱动参数,解决其驱动性弱、附着性差的问题;采用模块化、小型化设计思路,研制与动力底盘相匹配的动力传动系统、动力分配控制系统,优化配置动力源、转向系统,充分发挥动力性能,采用三维软件进行专用动力底盘整体建模,集成开发专用动力底盘,保证装填机在各种复杂环境下稳定行走。
3.2 自动对垄技术
目前,自动垄技术主要通过主动调整动力底盘和作业部件相对位置解决垄形直线度差的问题,提高对地垄弯曲变化的适应能力,有效解决由于作业部件位置偏差导致作业质量下降的问题。因此,自动对垄技术是提高基质装填装备的自动化水平和作业性能的关键所在,有必要进行自动对垄技术的研究。现有自动对垄技术主要通过作业过程中地垄弯曲数据的检测、分析和计算获得作业部件应调整到达的位置并驱动相应的执行机构完成对垄调整。开发能够在作业状态时获取清晰的地垄和垄沟的动态图像采集模块,研发图像处理识别模块,能够有效提取地垄图像,实现快速识别地垄纵向中心位置;研制依据地垄纵向中心位置实时精准控制动力底盘转向对垄控制模块,集成开发装填作业自动对垄系统,实现装填作业过程中自动对垄,能够较好地垄弯曲现象对机械化装填造成的难题,保证装填质量,提高基质装填机的使用效果和稳定性。
3.3 软薄容器自动抓取码放机构开发
软薄容器自动抓取码放机构是装填机的核心作业部件,其主要功能是将叠放在一起的容器抓取并分离,要求每次只能抓取一个容器,码放容器定位网格定位扶持装置内姿态稳定,不能有倾倒现象,不影响其他工位的顺利工作。针对小规格多层叠摞软薄容器难以抓取的难题,建立吸盘吸持力学模型,通过数值仿真、田间试验探究吸盘结构参数、振动参数、真空度对抓取分离效果的影响规律,研制由压缩机、振动器、吸盘等组成的振动吸盘式新型末端执行器;分析多末端联合连续作业轨迹,优化直角坐标码放机构参数,优化配置驱动元件,搭建机构样机平台,以其关键的结构参数和工作参数为影响因素,对作业性能进行优化试验研究,实现小规格多层叠摞软薄容器自动高效抓取码放于容器定位网格定位扶持装置内,保证整机作业效率和质量。
3.4 软薄容器基质装填智能控制系统开发
软薄容器基质装填机控制系统设计主要包括控制系统硬件设计和控制系统软件设计两个方面,其主要功能是控制动力底盘行走、基质集拢升运、容器自动抓取码放、容器直立定位、基质精准装填和容器摆放连续作业各个工位动作按照一定的逻辑关系进行运动,顺利有序完成各个动作,要求控制逻辑清晰,控制系统安全可靠,满足运行要求。因此,针对软薄容器基质装填智能控制要求,研究分析气动、电动元件特性,通过合理化的假设和三维模拟处理,设计动力底盘行走、基质集拢升运、容器自动抓取码放、容器直立定位、基质精准装填和容器摆放连续作业各个工位动作控制方案,完成硬件搭建和控制程序编写,开发色块苗软薄容器基质装填作业智能控制系统,通过样机运行试验,验证软薄容器基质装填智能控制系统模型的精确性以及所采用控制策略的可靠性。
3.5 关键作业参数实时监测技术
机械化作业质量及效率是种植户购买农机作业装备最关心的指标,农机作业工况复杂,导致较多机型可靠性和稳定性不高,故障率相对较高,因此农机作业装备关键作业参数实时监测技术被国内外学者广泛关注,开发了系列相关系统,目前已广泛应用于谷物收割机、花生收获机等作业装备。基质装填过程中,核心工作部件作业情况无法实时显示报警,操作者不能及时发现潜在故障,导致机器性能进一步恶化,直至机器无法使用。因此,针对色块苗软薄容器基质装填需要,研究各关键作业部件作业参数在线检测方法,设计色块苗软薄容器基质装填作业在线监测装置,实现对转动轴扭矩、提升输送量和容器姿态等自动监测;搭建CAN总线网络,实现车载监测终端与各信号采集控制子单元之间的数据交互,实现参数显示;采用Lab View软件编程,实时采集、显示及保存色块苗软薄容器基质装填作业参数,并在故障工况下进行报警提示。
4 结语
色块苗是城市绿色园林工程的重要组成元素之一,已成为乡村振兴的支柱产业之一,然而属于劳动密集型的容器基质装填环节仍采用人工作业,“用工慌”和劳动力成本高的矛盾日益突出,提高色块苗生产装备技术水平迫在眉睫。目前,色块苗容器机械化装填处于起步阶段,在推广应用过程中存在农机农艺匹配性差、复杂环境适应性差、软薄容器分离性差和经济效益提高不明显等问题,在整机较小尺寸和成本可控限制范围内对专用动力底盘、自动对垄技术、软薄容器自动抓取码放机构、软薄容器基质装填智能控制系统和关键作业参数实时监测技术等方面进行系统有针对性的改进提升,并集成应用到色块苗软薄容器基质装填机上,能够较好地解决色块苗复杂作业工况机械化装填难问题,对实现我国色块苗全程机械化生产和促进色块苗产业可持续发展具有重大意义。
猜你喜欢
发明与创新·小学生(2023年8期)2023-06-22
阅读(快乐英语中年级)(2022年11期)2022-05-30
通信技术(2019年12期)2019-12-11
读者·校园版(2019年24期)2019-12-10
学习月刊(2016年19期)2016-07-11
专用汽车(2016年4期)2016-03-01
陶瓷科学与艺术(2016年1期)2016-02-28
小朋友·聪明学堂(2015年8期)2015-11-30
小雪花·成长指南(2015年10期)2015-10-23
汽车维修与保养(2015年6期)2015-04-17
