
基于交互多模型的机动目标定位滤波方法
2024-01-04 14:27任雪峰张卓伟
雷达与对抗 2023年4期
任雪峰,张卓伟,胡 喆
(1.海装上海局驻南京地区第二军事代表室,南京 211153;2.中国船舶集团有限公司第八研究院,南京 211153)
0 引 言
在多平台雷达系统中,利用多个观测雷达获取的位置和速度信息可以对高机动目标进行无源雷达协同定位。无源雷达协同定位技术因其隐蔽性好、探测距离远等优点,已成为海上无源定位常用的技术之一。传统的最小二乘拟合定位方法[1]和标准卡尔曼滤波[2-3]定位方法无法满足高动态条件下无源定位的需求,而交互多模型[4]由于可以在目标运动过程中对目标的运动状态进行预测,从而自适应改变定位的匹配模型,因此在高机动目标定位中有较好的应用前景。
王刚等[4]采用惯导辅助推算目标的运动状态,分析高动态条件下的卫星导航运动模型,在高动态条件下取得了更好的定位性能。冯济洲[5]针对交互多模型算法在目标跟踪实际运用时所出现的一些问题,在线性与非线性条件下对交互多模型算法进行了改善,实现了对高机动目标准确有效的跟踪滤波。茅玉龙等[6]分析了对典型运动目标双站协同测距理论的定位精度,具体给出了提高双站定位精度优化算法的计算机仿真结果,完善了高机动目标定位滤波方法。王康[7]针对水下环境,在线性高斯动态系统中采用交互多模型卡尔曼滤波算法对水下机动目标进行跟踪定位,大大提高了水下高机动目标跟踪性能。在现有的定位技术中,一般仅通过标准卡尔曼滤波方法对高机动目标的航迹数据进行滤波,难以获得较高的定位精度。
本文提出一种基于交互多模型的高机动目标定位滤波方法,并将其应用于无源雷达的定位算法中。首先给出几种常见的运动模型,并介绍交互多模型算法的基本原理;然后围绕交互多模型算法在高机动目标定位中的具体应用,对算法做进一步推导;最后在几种运动条件下对算法进行仿真。
1 高机动条件下的目标模型
按定位需求可以将高机动目标的运动状态分为3种运动模型的组合:匀速直线模型、匀加速运动模型、转弯模型。
1.1 匀速直线运动模型
目标匀速直线运动的运动状态可以用CV模型表示为
(1)

1.2 匀加速直线运动模型
目标匀加速直线运动的状态可以用CA模型表示为
(2)
式中:T为时间间隔;x(k)=(xk,xk1,xk2)T为目标的状态向量,xk为位置信息,xk1为速度信息,xk2为加速度信息;w(k+1)为噪声向量,是服从均值为0、方差为σ2的高斯分布。
1.3 转弯运动模型
假设目标的转弯角速度为ω,则目标转弯运动的运动状态可以用CT模型表示为
(3)

2 基于交互多模型的高机动目标定位滤波方法
在较为清楚目标的运动规律时,一般通过建立特定的运动模型来描述目标的运动状态,但目标机动时的运动过程往往很复杂,单一运动模型不能很好地与目标真实的运动状态相匹配,而交互多模型通过多种运动模型来描述目标的运动状态,克服了单一运动模型的缺陷。在工程应用中,常常采用标准卡尔曼滤波模型实现目标航迹数据滤波,但滤波效果不太理想。无迹卡尔曼滤波算法通过非线性模型对非线性函数的概率密度分布进行近似,滤波效果通常比标准卡尔曼滤波模型更好。
2.1 标准卡尔曼滤波模型
标准卡尔曼滤波模型的观测方程和测量方程为

(4)
式中:Xn(k)为第n个模型第k时刻的状态向量;Fn(k)为第n个模型第k时刻的状态转移矩阵;Gn(k)为第n个模型第k时刻的过程噪声驱动矩阵;Wn(k)为均值为0、协方差矩阵为Qn的白噪声序列;Zn(k)为第n个模型第k时刻的观测向量;Hn(k)为第n个模型第k时刻的观测矩阵;Vn(k)为均值为0、协方差矩阵为Rn的白噪声序列。
2.2 无迹卡尔曼滤波模型
无迹卡尔曼滤波模型的观测方程和测量方程为

(5)
其中h是非线性观测方程函数。
2.3 基于交互多模型的目标定位滤波算法
基于交互多模型的目标定位滤波算法具体流程如图1所示。
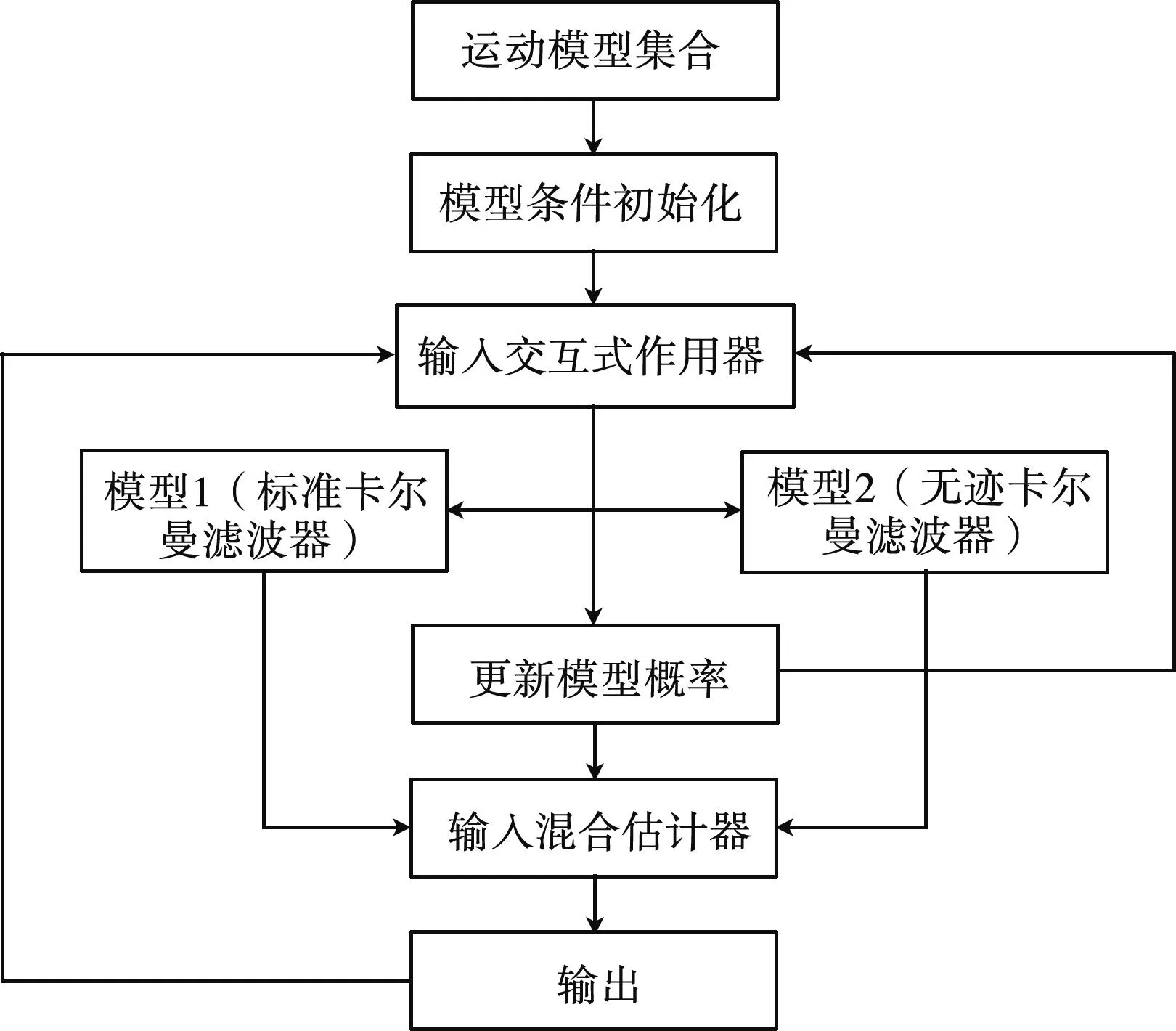
图1 交互多模型定位滤波算法流程

模型n预测概率(归一化常数)为

(6)
模型m到模型n的混合概率为

(7)
式中:pmn为模型m到模型n的转移概率。
模型n的混合状态估计为
umn(k-1|k-1)
(8)
模型n的混合协方差估计为
{Pm(k-1|k-1)+
(9)
(10)
对P0n(k-1|k-1)进行一步预测,得到k时刻模型n的误差协方差先验估计:
Pn(k|k-1)=Fn(k)P0n(k-1|k-1)Fn(k)T+
Gn(k)QnGn(k)T
(11)
计算卡尔曼增益:
Kn(k)=Pn(k|k-1)HT×
[HPn(k|k-1)HT+Rn]-1
(12)
(13)
得到更新后的误差协方差先验估计:
Pn(k|k)=[I-Kn(k)H]Pn(k|k-1)
(14)
3 实验仿真
为了验证本文算法对机动目标的定位效果,在MATLAB中针对不同的跟踪场景开展仿真实验。
(1)一般机动目标
假设雷达对一个在二维平面上运动的一般机动目标进行观测,目标初始坐标为(2 000 m,10 000 m),初始状态为在y轴方向具有初始速度vy=15 m/s,具体运动参数如表1所示。
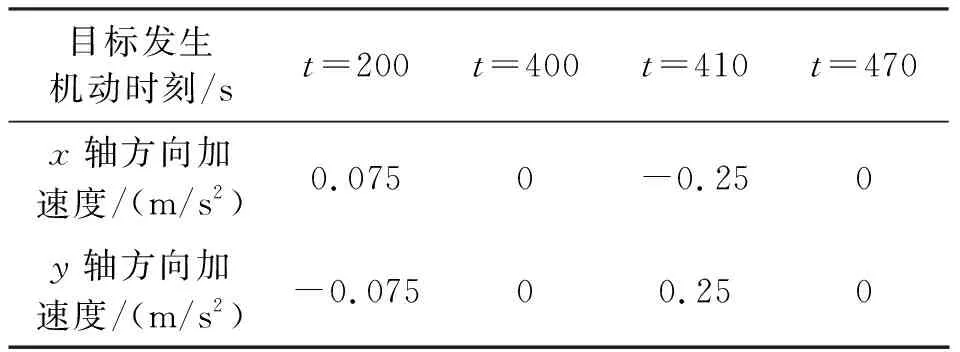
表1 一般机动目标的运动参数
整个运动过程历时700 s,雷达采样间隔为1 s,测距误差为100 m,蒙特卡洛次数为100次,采用交互多模型滤波算法对目标进行跟踪。交互多模型针对不同的运动状态采用3个滤波模型,模型的噪声方差q分别为0、0.01、0.09,模型先验概率分别为1/3、1/3、1/3,模型转移概率矩阵为
使用基于交互多模型的滤波算法对一般机动目标进行定位,目标的真实轨迹、滤波迹线和量测点迹结果曲线如图2所示。可以看出:经过滤波得到的估计曲线基本上在真实轨迹附近,无论是直线运动还是转弯运动阶段,都能相对较好地完成目标定位,达到较好的滤波结果。
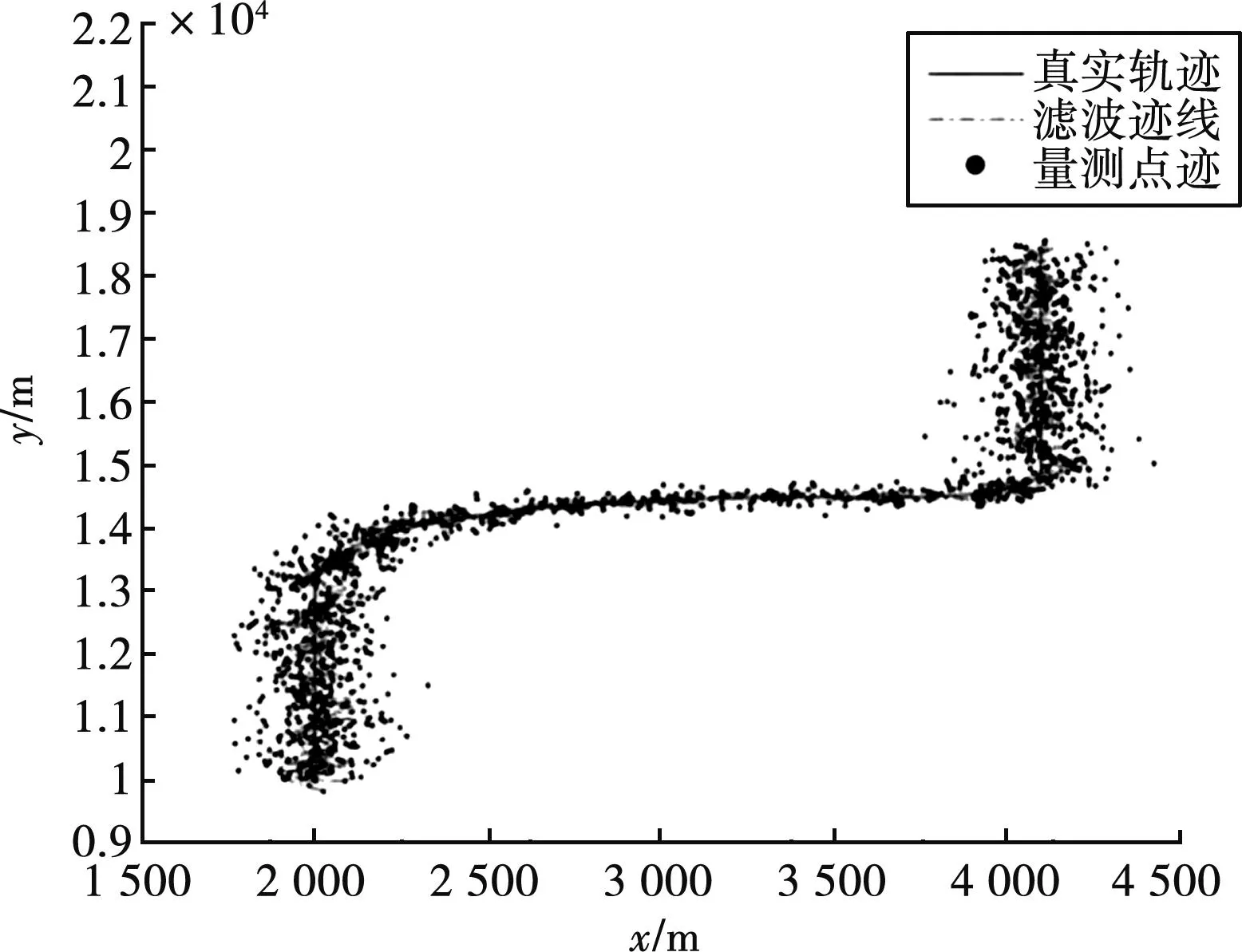
图2 本文算法对一般机动目标的定位效果
(2)高机动目标
假设雷达对一个在二维平面上运动的高机动目标进行观测,目标初始坐标为(38 480 m,12 000 m),初始状态为在x轴方向具有初始速度vx=-426 m/s,具体运动参数如表2所示。
表2 高机动目标的运动参数
整个运动过程历时85 s,雷达采样间隔为1 s,测距误差为100 m,蒙特卡洛次数为100次,采用交互多模型滤波算法对目标进行跟踪。交互多模型针对不同的运动状态采用3个滤波模型,模型的噪声方差q分别为0.01、10、100,模型先验概率分别为1/9、4/9、4/9,模型转移概率矩阵为
使用基于交互多模型的滤波算法对高机动目标进行定位,目标的真实轨迹和量测点迹结果曲线如图3所示。可以看出:本文算法能够较好地拟合高机动目标的运动轨迹,在加速度较小时与真实轨迹的误差几乎为零,在机动目标运动状态发生急剧变化时也能及时调整,从而达到较好的滤波效果。
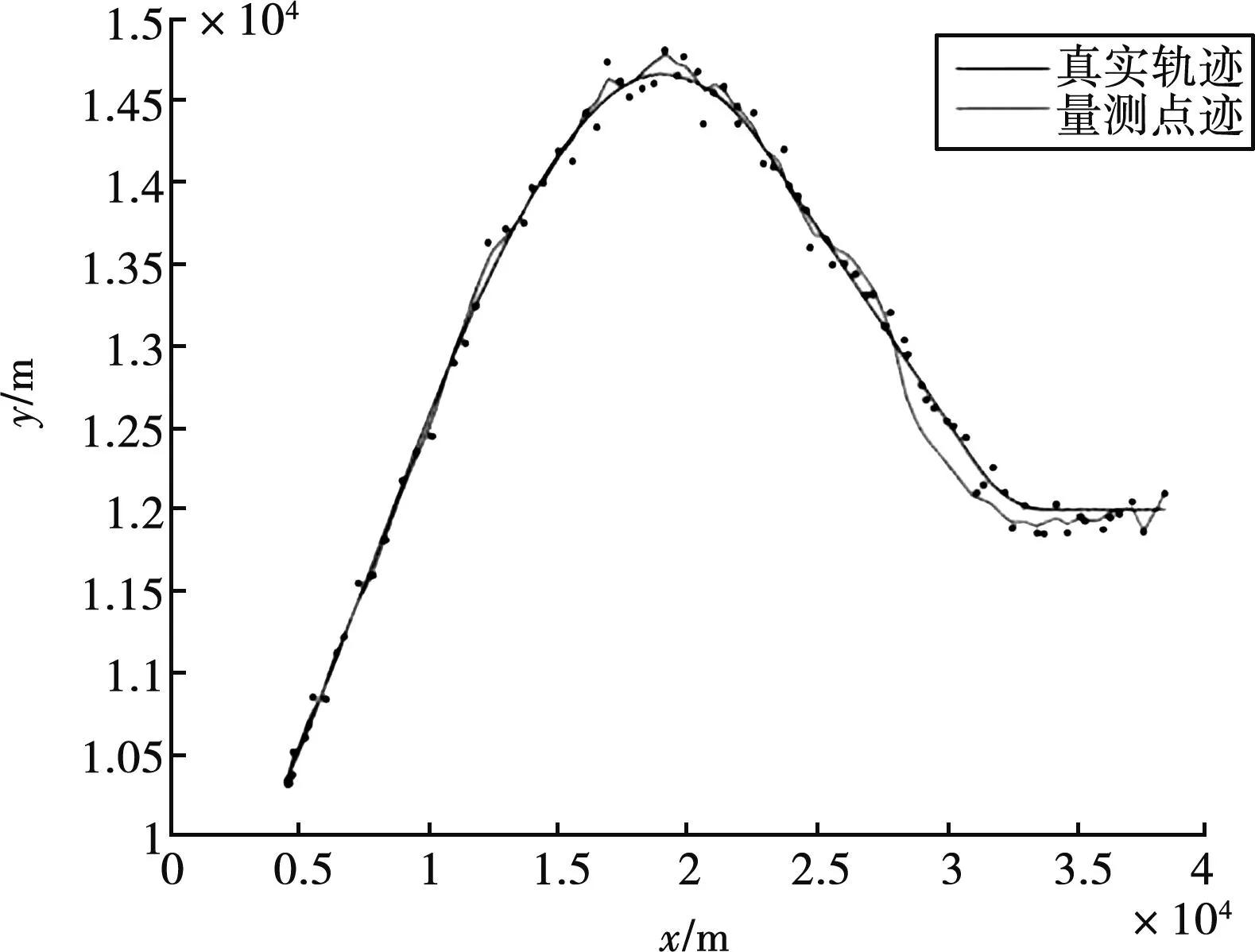
图3 本文算法对高机动目标的定位效果
(3)定位误差对比实验
为了进一步验证本文算法对高机动目标的定位效果,采用最小二乘拟合法作为对比算法,在相同的实验条件下开展实验,结果如图4所示。可以看出:随着跟踪步数的增加,在高机动情况下最小二乘拟合法和本文算法的定位误差均逐渐收敛,且相应的收敛值均小于雷达的测距误差,这说明两种算法都可实现对高机动目标的跟踪。但本文算法的定位误差在目标的整个运动过程中保持平稳且维持在较低水平,因此跟踪精度优于最小二乘拟合法,更适合高机动目标定位。
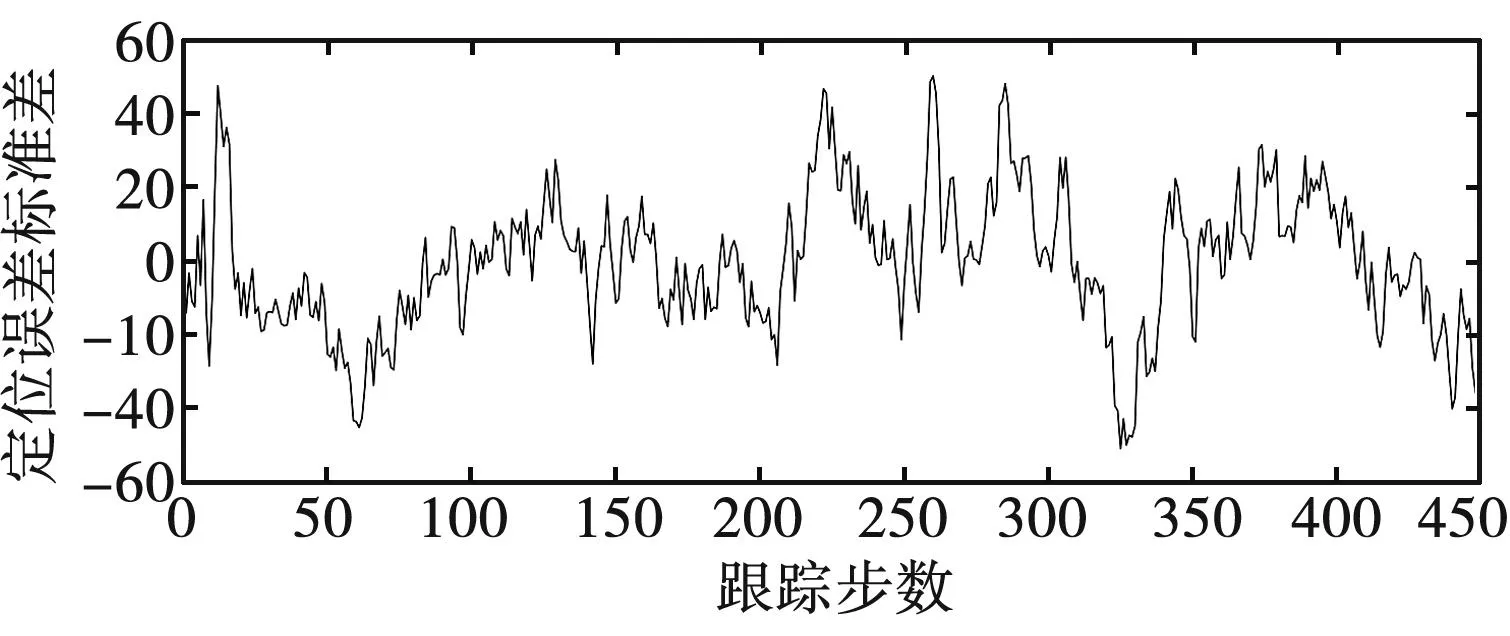
(a)最小二乘拟合法定位误差
4 结束语
本文提出一种基于交互多模型的高机动目标定位滤波方法。交互多模型算法通过多个运动模型描述目标的运动状态,利用有效的加权融合进行系统状态估计,一定程度上克服了单运动模型估计误差较大的问题。仿真结果表明:本文算法能够较好地拟合高机动目标的运动状态,与其他算法相比定位误差较低,能够满足无源雷达对于高机动目标定位的需求。
猜你喜欢
装备制造技术(2020年3期)2020-12-25
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
北京航空航天大学学报(2017年9期)2017-12-18
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27
电子设计工程(2014年6期)2014-02-27
