
机场围界无人巡检系统
2024-01-08 12:14周科杰张力波
现代计算机 2023年20期
周科杰,毛 玙*,张力波,曹 铁,李 明,张 平
(1. 民航局第二研究所,成都 610041;2. 民航成都电子技术有限责任公司科研开发中心,成都 611430)
0 引言
机场围界是机场的首道防线,是机场飞行区安全保障的重要组成部分。根据民航业标准,机场应对围界进行日常巡检。目前国内机场围界依赖人工巡检,次数约为每日8次,对于千万级机场而言,每年巡检里程可达10万千米,存在工作量大、巡检不规范、过程不透明、结果无着落等缺陷,这些缺陷严重威胁机场飞行区安全。
机场围界无人巡检系统通过自动驾驶技术驱动巡检机器人在围界巡场道上自动导航巡检,采集围界巡检视频;通过智能视频分析技术对巡检视频进行实时分析,包括围界入侵人员检测、异常预警等;以围界巡检管理终端实现围界巡检信息化管理、异常可视化、入侵定位报警、围界异常展示定位等。相比人工巡检,围界无人巡检具有低成本、全天候、适配机场环境等优点[1],它依靠自动驾驶、计算机视觉等人工智能技术,进行围界巡视检查和实时分析,并实时报送到后台,从而克服人工巡检存在的诸多问题,更好地保障机场飞行区安全。
1 总体架构
图1为系统的总体架构,具体包含以下几个部分:

图1 机场围界无人巡检系统总体架构
(1)围界无人巡检机器人:巡检机器人依托激光雷达和组合导航在围界巡场道上进行自动导航巡检[2],通过可见光/热成像一体化云台相机采集巡检视频。并且采用4G/5G 无线通信方式实现机器人与后台服务器之间的通信。
(2)云平台:包含服务器、GPU计算卡等部分,实现巡检数据存储,巡检视频智能分析等功能。主要存储入侵检测数据、围界异常、巡检任务、巡检视频以及机器人状态等数据。
(3)监控中心:监控中心主要包含围界无人巡检管理平台,负责与用户交互,能够实现实时查看巡检视频、机器人状态;机器人远程接管,给巡检机器人下发命令;出现异常事件时,触发平台报警;管理巡检异常信息等功能[3]。
2 详细设计
2.1 围界巡检机器人
2.1.1 巡检机器人
巡检机器人由动力底盘以及安装在底盘之上的功能元件组成,功能元件包含工控机、激光雷达、惯性导航系统、可见光/热成像一体化云台相机、信号警示灯等部分,机器人主要参数指标见表1,外观设计如图2所示。

表1 巡检机器人主要技术指标

图2 巡检机器人外观设计
2.1.2 自动导航巡检
机场围界场景下巡检机器人自动导航巡检的核心难点是在巡场道低纹理非结构化道路、机场电磁干扰、飞机高空遮挡GPS、全天候、恶劣天气等条件下如何实现机器人自身的高精度定位。围界无人巡检机器人的自动导航巡检系统采用多传感器融合高精度定位方法。多传感器包括GNSS-RTK、INS、激光雷达SLAM,融合定位方法为Kalman滤波算法[4]。首先将INS作为参考系统;再将INS输出数据与GNSS-RTK输出数据构造子滤波器1(记为LF1),通过Kalman滤波得到局部估计及其协方差阵;再将INS输出数据与SLAM 输出数据构造子滤波器2(记为LF2),通过Kalman 滤波得到局部估计及其协方差阵;将各子滤波器LF1和LF2的局部估计及其协方差阵输入主滤波器,与主滤波器的估计进行融合,得到无人设备位置的全局最优估计及其协方差阵,技术路线见图3。
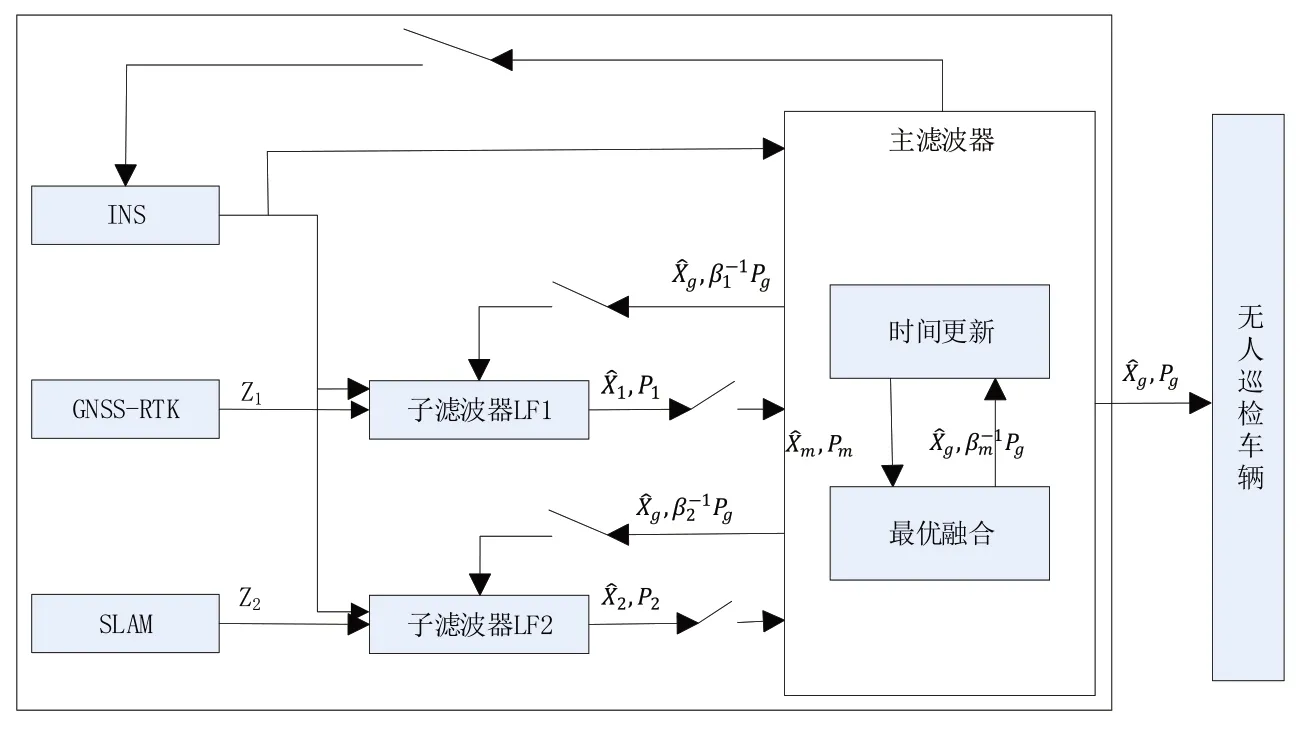
图3 多传感器融合高精度定位方法
2.1.3 巡检视频采集
通过机器人上配置的可见光/热成像一体化云台相机实现对巡检视频的全天候采集。云台先将视频上传至机器人工控机,然后通过4G/5G移动网络将巡检视频实时传输至视频服务器,视频服务器一方面存储视频,同时还将巡检视频实时推送至客户端。工作流程如图4所示。

图4 巡检视频采集流程
2.1.4 信号警示灯光
围界巡检机器人在机场围界巡场道路巡检过程中必须遵守机场交通规则,因此必须依照机场要求配备信号警示灯。围界巡检机器人整个车体共六个信号警示灯,其中包含灯1、灯2、灯3、灯4共四个交通信号灯,灯5、灯6共两个机场工作必备报警灯。信号灯提示时前方的灯闪烁白光,后方的灯闪烁红光,车灯安装俯视图如图5所示。
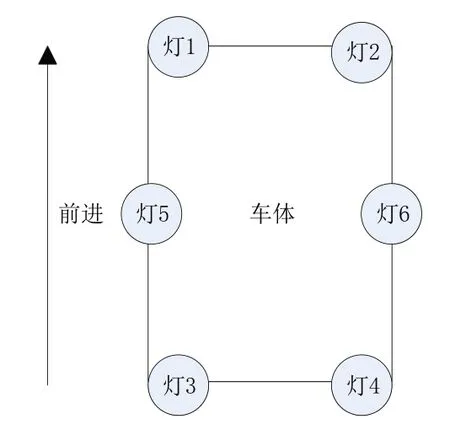
图5 巡检机器人灯光安装俯视图
机器人在倒车、转弯、刹车、变速等情况下,工控机会根据车轮的速度及偏转的角度进行判断从而给出不同方式的提示,具体规则设置见表2。

表2 车灯闪烁规则
2.1.5 自主充电
要想实现围界巡检的无人化巡检,机器人自主充电是必不可少的一环。当管理人员在后台发送巡检任务,机器人收到巡检任务后,将依据巡检线路信息和自身电量信息判断电量是否充足,若不足以完成巡检任务,则继续充电,同时向后台反馈拒绝接受任务信息。机器人完成巡检任务后,会停靠到充电桩进行自主充电[5]。自主充电工作流程如图6所示。
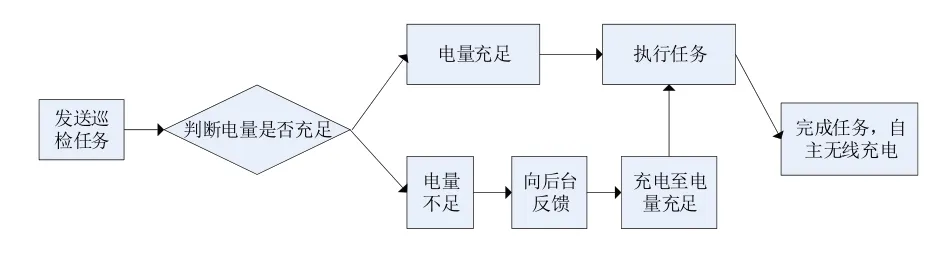
图6 自动充电流程
2.2 围界入侵检测
围界入侵检测的主要目的是防止机场外来人员通过攀爬、翻越、破坏围界进入机场飞行区,从而造成重大安全事故。围界入侵检测难点是全天候有效工作。传统可见光视频能够清楚展示场景中的细节轮廓,但在夜间、雨雾天气下难以有效工作,而热成像图像的抗干扰能力较强[6]。针对这一问题,本系统采用一种基于YOLOv7的多模态入侵检测算法。该算法使用YOLOv7 Backbone 作为可见光图像特征提取网络,YOLO-Hotnet 作为热成像图像特征提取网络,分别提取两种模态的多尺度特征,使用注意力机制对两种特征进行动态加权融合,权重系数组由深度网络自动迭代更新,最终实现混合特征网络并使用该多模态融合特征网络进行全天候入侵检测。图7所示即采用的多模态融合围界入侵检测方法。
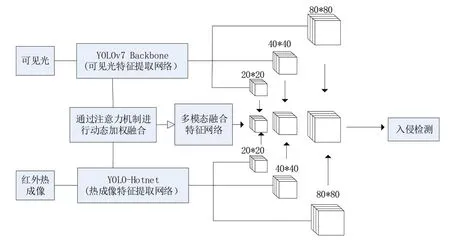
图7 多模态融合围界入侵检测
2.3 围界无人巡检管理系统
通过开发机场围界无人巡检管理系统,实现围界管理人员对围界无人巡检系统的信息化管理,系统界面展示如图8所示,主要包含以下几个模块:
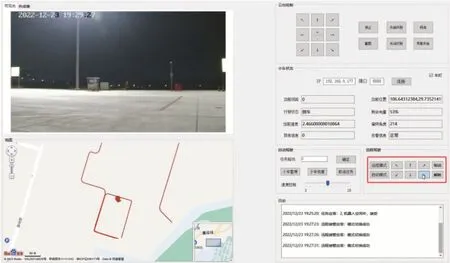
图8 围界无人巡检管理系统
(1)巡检视频模块:展示巡检机器人实时采集的视频,可以分别切换可见光与热成像的视频展示界面,在巡检视频上还会通过bounding8-box对围界入侵目标进行实时标注。
(2)巡检地图模块:展示巡检机器人的巡检任务线路,同时将巡检机器人的位置实时更新到地图上。
(3)巡检机器人状态模块:显示机器人状态信息,包括行驶路线、机器人当前位置、剩余电量、速度等信息。同时该模块负责管理系统与巡检机器人的远程连接,通过在该模块输入IP 地址和端口号,通过TCP 协议将客户端与机器人进行连接。
(4)机器人云台控制模块:管理人员通过云台控制模块可以控制机器人运动方向、调整摄像机角度、缩放画面大小来查看围界具体情况。
(5)机器人自动驾驶巡检模块:设置自动巡检任务,包括巡检线路、巡检速度,机器人会根据信息执行相应的巡检任务。同时管理人员可以在巡检过程中通过暂停、恢复、取消任务等指令控制机器人的运动状态。
(6)机器人远程驾驶巡检模块:管理人员在必要条件下,将通过远程驾驶巡检模块接管巡检机器人。
(7)巡检日志模块:展示巡检机器人检测到的如围界异常或人员入侵等的异常情况,在系统界面会展示发现时间、机器人编号、异常类型等。
3 机场围界巡检实验
3.1 巡检机器人基本指标测试
对巡检机器人的基本技术指标进行了测试,测试结果见表3。
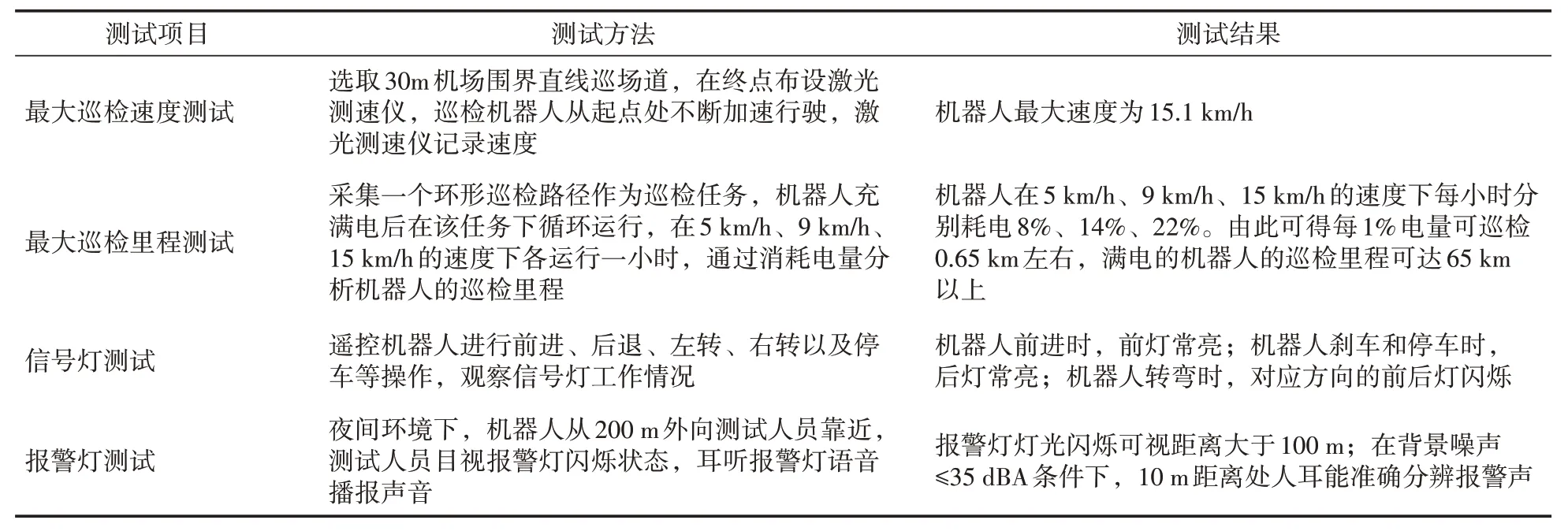
表3 巡检机器人基本指标测试
3.2 无人巡检导航
对巡检机器人的导航定位、停障、远程接管等功能进行测试,测试结果见表4。
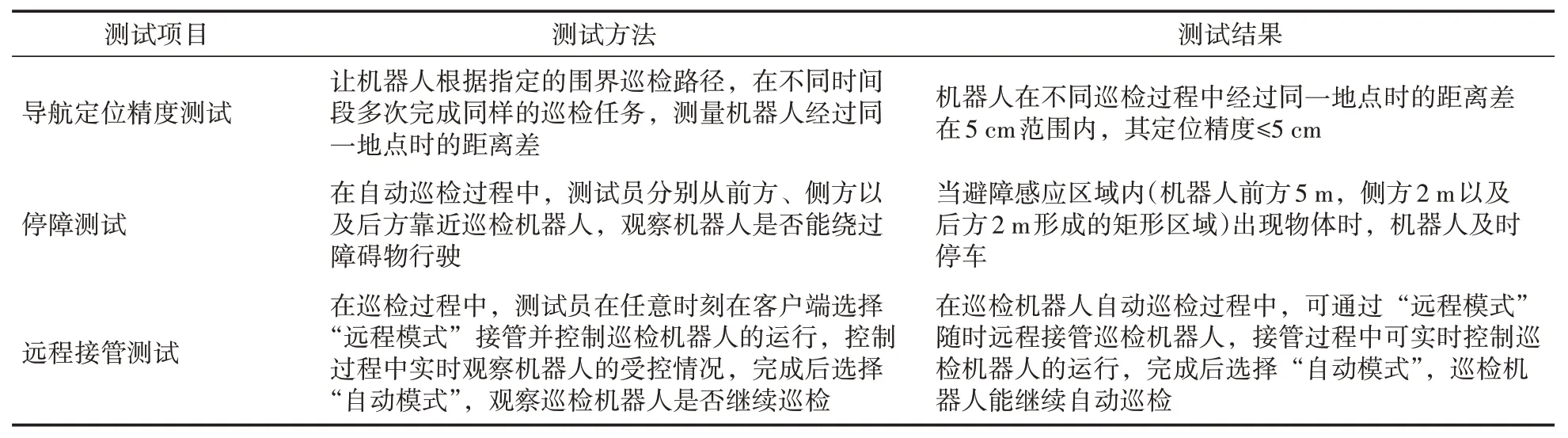
表4 无人巡检导航功能测试结果
3.3 围界入侵检测
对巡检机器人围界入侵功能进行测试,从目标检测正确率与最大目标检测距离两个角度进行测试。测试结果见表5。
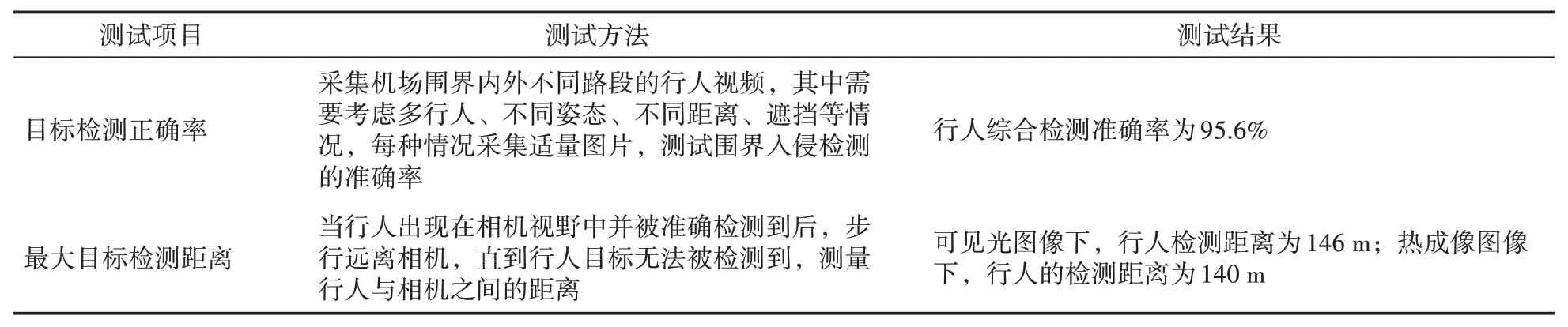
表5 围界入侵检测功能测试
4 结语
我国机场围界几乎100%使用人工巡检的方式,存在工作量大、巡检不规范、过程不透明、结果无着落等诸多问题,严重威胁了机场安全。针对这些现状,本文设计了一套机场围界无人巡检系统,并在重庆机场测试了其可行性,基本能满足机场围界巡检的需求,对推动我国机场围界巡检的智慧化、少人化、无人化提供一定的参考指导。
猜你喜欢
环球时报(2023-02-28)2023-02-28
铁道通信信号(2020年3期)2020-09-21
学生天地(2020年5期)2020-08-25
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
电子测试(2018年10期)2018-06-26
新高考(英语进阶)(2017年11期)2018-01-22
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
汽车博览(2016年9期)2016-10-18
