
多源LiDAR与倾斜摄影应用于城市建筑竣工测绘的对比分析
2024-01-08 10:42董振川刘长睿罗保林尚金光白晓明
城市勘测 2023年6期
董振川,刘长睿,罗保林,尚金光,白晓明
(1.成都市勘察测绘研究院,四川 成都 610081; 2.四川省城市信息化工程技术研究中心,四川 成都 610081;3.西南交通大学地球科学与环境工程学院,四川 成都 611756)
0 引 言
三维激光扫描测量技术是通过激光扫描的方法,可快速高效获取区域内目标高分辨率点云数据。作为一种为建立目标三维模型提供点云数据获取的新兴技术,包括地面架站式三维激光扫描、车载与机载LiDAR等多源LiDAR技术已在测绘领域中得到广泛的研究与应用,如谢博等[1]在房屋模型重构研究中,利用LiDAR技术结合测试点实现T型房屋模型重构;李婷婷[2]提出一种地空LiDAR数据融合的公路平纵线测量模拟技术,利用车载和空中LiDAR实现公路平纵线的高效测量。同时,国内也有部分学者将多源LiDAR技术与其他测量技术结合进行更加深入研究,李海亮[3]结合倾斜摄影与地面LiDAR,探索铁路工点勘察新方法;周志勇[4]、荷丹[5]等利用无人机分别搭载小型LiDAR和五镜头倾斜相机获取的点云和倾斜影像作为数据源建立多种三维模型。另一方面,尚金光[6]、胡玉祥[7]、闵启忠[8]等将LiDAR点云应用于对测绘技术与测绘成果有更高要求的建筑竣工测绘,李永强[9]等人提取机载LiDAR顶面数据、航空正射影像数据和车载LiDAR立面数据的建筑轮廓线进行定量研究,展现出三维激光扫描技术在建筑竣工测绘中广阔的应用前景与研究价值。
本文以某新建小区为对象,使用地面架站式三维激光扫描、无人机机载LiDAR、无人机倾斜摄影分别进行测量,获取该新建小区区域内建筑的点云数据以及倾斜摄影三维模型,绘制其平面图。以全站仪及RTK获取建筑特征点作为参考,分别对三种方法获得的平面图进行精度统计,综合对比分析三种方法各自优缺点,并完成机载LiDAR用于建筑竣工测量可行性分析,为城市建筑竣工测量提供技术参考。
1 总体作业流程
本次实验的作业对象为某新建商业楼盘,测区面积约 65 000 m2,包括17栋主要建筑及构筑物,其中8栋高层建筑(最高建筑高度超过 150 m),9栋三层以下建筑,另含道路、绿化及其他独立地物等。同步竣工测量的流程主要分为外业数据采集和内业数据处理两大部分,其中外业的主要内容为点云数据、倾斜影像的采集和像控坐标的人工测量,内业主要内容为数据导入、点云拼接、坐标转换、降噪抽稀、点云生成或三维建模,如图1所示。

图1 测量作业流程图
2 外业数据采集
2.1 架站式三维激光扫描
架站式三维激光扫描技术主要以地面架站等方式通过激光器发射高能量、短脉冲的激光束映射到目标表面并接收反射的信号,根据激光束从发射到接收所需的时间来计算出LiDAR系统与目标的距离,从而测量目标高度、形状等信息。
图2中A为激光发射器,O为被测物体,B为激光接收器透镜,f为接收透镜和储存器之间的间距,L为激光发射器光路和接收透镜主光轴之间的偏移,X为储存器上的位置偏移,实际的测量距离D的计算公式为:

图2 架站式三维激光扫描测量原理图
(1)
通过控制激光束的扫描方向和范围,可以测量出地面上物体多个点的距离和反射率等信息,并将这些数据组合成系统周边地理信息点云数据集。
本次实验使用型号为Leica RTC360,其集成HDR全景成像系统,能够实现每秒200万个点的超高速扫描,有效扫描范围0.5~130 m,分辨率 6 mm与 12 mm,扫描点位精度<6 mm,扫描仪具体参数如表1所示。
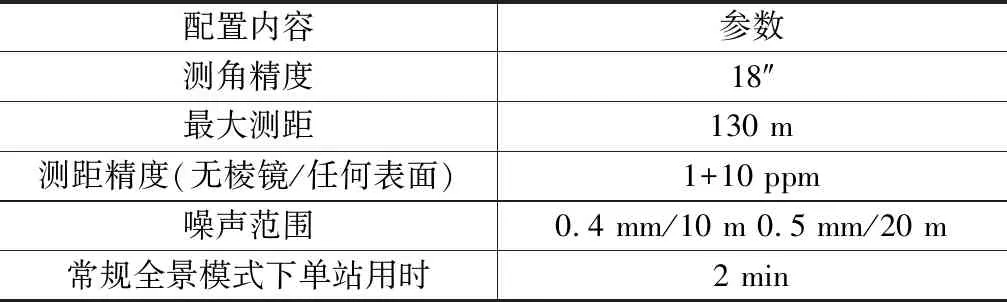
表1 RTC360扫描仪技术参数
在完成外业标靶的测量之后,将仪器简单组装与整平。目前,众多型号的三维激光扫描仪已经实现一键操作,常规设置仪器参数后便可进行扫描作业。在扫描过程中需进行后续设站线路规划,做好测站位置略图、测量时间等观测记录。
2.2 机载LiDAR三维激光扫描
机载LiDAR则是通过在机载平台上安装激光器和接收器等设备,快速获取大范围地面高度、形状等点云信息。机载LiDAR测量原理与地面LiDAR类似,也是利用激光束在传播过程中的反射和散射,根据激光束与地面交互的时间和反射强度等信息来计算出地面的高度和形状等参数。但与地面LiDAR不同的是,机载LiDAR需要在飞行过程中完成对地面的扫描,因此需要在技术和设备上做出相应的调整和优化。根据测量需求与飞行器姿态,常见的调整参数包括:扫描角度、翻滚角、定姿精度(POS)、光斑精度等。
本次实验使用飞马D2000无人机平台搭载LiDAR2000轻型机载激光雷达系统,经过无人机管家数据解算和融合算法,可以达到 5 cm(50 m航高)测量精度,实现地形图测量、土方测量等测绘作业。LiDAR2000具体参数如表2所示:

表2 D-LiDAR2000机载LiDAR技术参数
在进行机载LiDAR测量前,首先根据测区已有影像、地形图等资料,分析作业区植被、建筑物等分布情况,确定飞行平台的各项作业参数,在本次实验中为:飞行高度分别设置为 190 m与 250 m、旁向重叠度50%,最终的点云密度最高能达到300点/m2;在航飞同时进行外业像片控制点布设与测量,为后续图像拼接与误差改正提供基础。
2.3 无人机倾斜摄影测量
无人机倾斜摄影测量是一种快速获取地面三维信息的技术,利用安装在无人机上的倾斜摄影设备,通过多个摄像头,同时拍摄地面图像,由于摄像头的安装角度和方向不同,拍摄出来的图像具有不同的视角和重叠度,如图3所示。
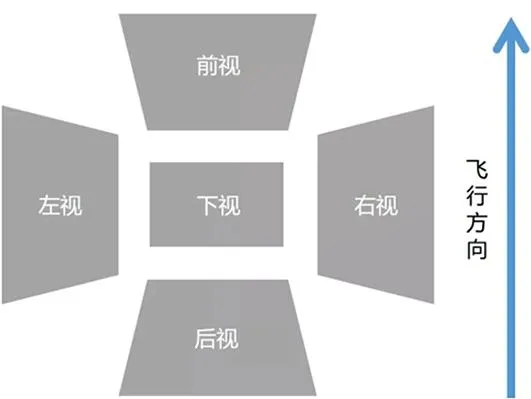
图3 无人机倾斜摄影原理图
通过无人机上的GNSS(全球卫星定位系统)和IMU(惯性测量单元)等设备,获取无人机的位置和姿态等信息,并将其与摄像头拍摄的图像进行匹配,确定每个图像的三维位置和姿态。垂直和倾斜影像的地面分辨率是倾斜航摄仪最为直观与重要的参数之一,也是直接决定后续三维建模质量的关键因素,其计算公式如下:
(2)
(3)
(4)
式中,δ为传感器单像元大小;f为相机焦距;αy为倾角;βy=arctan(b/f)为视场角的一半;h为飞行高度。同时,需保证影像重叠度达到要求,重叠度分为航向重叠度和旁向重叠度,其计算公式如下所示:
(5)
(6)
式中Px为航向重叠度,LP为航向重叠部分的长度,LX为相片长度;Ps为旁向重叠度,HP为旁向重叠部分的宽度,Hx为相片宽度。
本次实验中无人机倾斜摄影测量作业时采用的飞行平台与LiDAR三维激光扫描作业相同,将无人机换装D-OP3000倾斜摄影仪后,按照测区的建筑物测量要求,设置分辨率为 3 cm,飞行高度设置为 190 m与 250 m,旁向重叠度65%,航向重叠度80%,对测区进行多角度飞行摄影,获取多张高分辨率的倾斜摄影图像用于后续三维建模。
3 内业数据处理
3.1 地面点云数据处理
Leica RTC 360在采集过程中,已经通过VIS视觉增强技术,实时计算扫描测站相对于前一测站的位置,从而实现类似导线的测站轨迹网络,通过Cyclone Register 360软件帮助各测站实现自动拼接。本次实验点云数据拼接成果均满足有效点云重叠度应不低于30%,拼接站点间的拼接精度应在 5 mm以内的规范要求,如图4所示。

图4 Cyclone Register 360中测站连接示意图
点云拼接结束后,利用标靶控制点将点云从仪器独立坐标系转换至城市坐标系。由于采集方式和目标周边环境等因素的影响,采集的点云数据不可避免地存在噪声点,通过软件Cyclone对点云数据中的离群噪声、混杂点、随机噪声进行处理,自动化或者人工地剔除噪声,并在软件中检查数据的点群误差、重叠度、强度等成果。点云数据中还存在脱离扫描目标物的异常点、孤立点时,在不影响目标物特征识别与提取的前提下采用滤波或人机交互进行降噪处理。
将处理完成点云模型直接加载到CAD中,利用Cyclone软件安装在CAD中的Cloudworx插件直接调用Cyclone数据库进行切片绘制,通过切换至前、上视图,按高度进行水平切片,获取测绘房屋筑基底切片图。对未扫描完全的拐点,使用CASS软件进行人工采集,形成围墙、车库出入口等,将线划图与点云数据相结合形成最终的竣工平面图。
处理机载LiDAR数据时,方法步骤与架站式点云数据处理相同,但无人机在飞行时,会自动记录所在位置的坐标信息,结合无人机的各项状态参数即可获取该航带内的点云数据坐标信息,并完成航带间的点云平差。
3.2 无人机倾斜摄影建模
本实验中使用ContextCapture软件进行三维建模,利用航飞获取的多视图影像、POS数据自动进行测区内的特征点提取和影像匹配,根据匹配结果和初始外方位元素进行区域网平差,结合像控点成果计算出满足精度的影像的外方位元素,完成绝对定向,并确保空三精度符合实验要求。将空三成果导入软件进行三维模型重建处理,自动生成OSGB格式的三维模型。
4 应用分析
4.1 作业效率评定
通过收集、统计三种测量方式在人员配置、外业时间以及内业时间等方面进行对比,结果如表3所示:

表3 三种测量方式作业信息
由表3内容分析可得:倾斜摄影和机载LiDAR在外业时间和作业人员数量上优于架站式点云,且输出成果的数据量更小;架站式点云内业耗时最多,其主要原因在于扫描采集点云数据较大,原始点云数据导入软件耗时较长;倾斜测量则是大部分内业时间用于原始影像生成三维模型。
4.2 实验结果分析及评价
将点云数据和倾斜模型导入CASS(2016版)中,可以立体展现点云数据和倾斜模型的三维效果,如图5~图7所示,同时方便从多个方位对图像进行目视判别,有助于人工进行建筑竣工平面图绘制,如图8所示。

图5 机载LiDAR点云成果展示图

图6 架站式三维激光扫描点云成果展示图

图7 倾斜模型成果展示图

图8 部分建筑竣工平面图
结合图5~图8展示结果分析得出:
(1)机载LiDAR俯视图中各类点云分布模糊,点云特征提取困难,离航线较近的高层建筑顶部具有一定清晰度,屋顶构筑物(如楼梯间、烟囱等)识别度较好;离航线较远的低层建筑与地面现状道路部分仅能分辨出大致轮廓,平面图绘制精度难以保证,因此未进行建筑平面图绘制。
(2)架站式点云俯视图中各类地物点云分布清晰,点云特征明确,便于人工分辨与平面图绘制;离地面较远的建筑顶部点云分布较少,建筑屋顶面点云无法获取,但不影响建筑物竣工平面图绘制。
(3)倾斜摄影三维模型可以直观呈现测区内建筑(尤其是建筑顶部)、植被、道路、水系等,模型特征明确,便于人为分辨与平面图绘制;但由于航拍角度等原因,模型中常有建筑底部及建筑内凹处变形严重,对底层建筑轮廓线、高层建筑内凹阳台、空调板等绘制有较大干扰,其建筑竣工平面图与架站式点云平面图对比,出现建筑局部漏绘、错绘的情况。
4.3 精度评定
从该区域的竣工平面图中选取架站点云与倾斜摄影三维模型各25组样本平面点与全站仪检测平面点进行点位对比,基于点云数据内业处理中的点位配准以及无人机飞行中获取的POS信息,能够直接在cyclone软件中获取任意点云的位置坐标信息,平面精度评定主要以平面点位中误差为评定标准,其中误差的计算方法如下:
(2)
式中:mXp为点云数据点坐标相对于外业控制测量点坐标成果的x坐标差值,mYp为y坐标差值。M即点位中误差。获得统计平面精度并进行分析,结果如表4所示:

表4 平面精度统计
表4中△为点云较差,其中架站点云最大误差为 4.7 cm,最小误差 0.1 cm;倾斜模型最大误差为 11.6 cm,最小误差 0.8 cm。架站式点云误差集中在1~3 cm;倾斜模型误差在后三个区段中均有所分布,此次实验结果以此可以得出:架站式扫描获取的点云数据更加适合竣工测平面图绘制。
获取建筑物点云数据的高程信息时,可直接在点云相应位置上采样,从该区域获取架站点云25组样本高程点与全站仪、RTK检测高程点进行高程信息对比,获取倾斜模型与LiDAR点云各35组样本高程点与全站仪、RTK检测高程点进行高程信息对比,结果如表5所示:
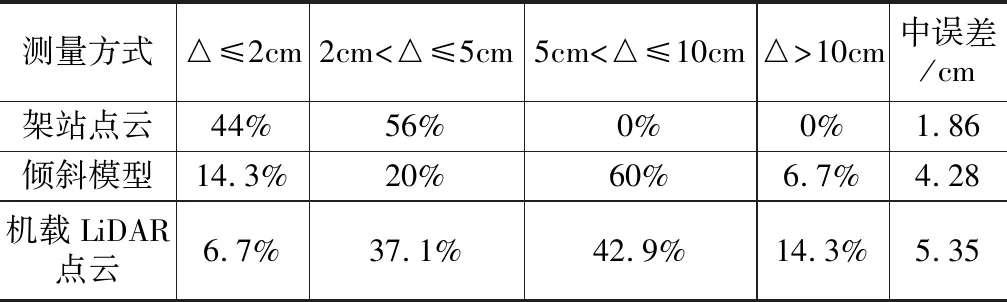
表5 高程精度统计
其中架站点云最大高程误差为 4.3 cm,最小高程误差 0.3 cm;倾斜模型最大高程误差为 11.3 cm,最小高程误差 1.0 cm;机载LiDAR点云最大高程误差为 16.8 cm,最小高程误差 2.0 cm;架站式点云的高程精度误差均小于 5 cm,倾斜模型与机载LiDAR点云均有超过50%的高程精度误差大于 5 cm。由数据对比分析可得架站式点云高程精度最佳,倾斜模型与机载LiDAR点云高程精度较差。
4.4 误差来源分析
结合实际的竣工测量项目进行状况,分析导致数据误差的主要来源有以下几点:
(1)架站点云:平面图绘制的平面与高程精度误差主要来源于点云特征人工识别误差、扫描测站拼接误差等。
(2)倾斜模型:无人机航拍质量(包括无人机飞行姿态、航拍照片拍摄清晰度、无人机定位精度等)、倾斜模型特征点人工识别误差等。
(3)机载LiDAR点云:除受无人机飞行、定位因素影响外,飞行航高与激光雷达的点云覆盖密度同样影响点云绘制平面图精度。
5 结 论
本文通过架站点云、机载LiDAR点云、无人机倾斜摄影测量三种测量方式对同一区域进行了房屋竣工测绘,通过对实验数据结果进行分析后,主要结论如下:
(1)架站式点云能够有效扫描范围内全地物清晰的轮廓特征,有利于人工提取点云特征与竣工平面图绘制,但缺少建筑顶部点云数据;倾斜模型因其直观展示测区范围全部地形地物,模型特征清晰,但部分建筑模型局部变形较大,对于竣工平面图绘制有一定限制;机载LiDAR点云整体密度较低,点云特征模糊,平面图绘制精度难以保证。
(2)以全站仪与RTK检测结果为参照,架站式点云的平面点位精度与高程精度整体较好,其中误差均小于 2 cm,验证架站式点云测量精度能够满足城市建筑竣工测绘要求;倾斜模型平面点位精度中误差小于 4 cm,高程精度中误差小于 5 cm,能够满足常规地形图测量要求,在一定限定条件下,基本满足房屋竣工测量测量要求,可用于补充房屋竣工建筑顶部信息。
猜你喜欢
当代陕西(2020年23期)2021-01-07
鸭绿江·下半月(2020年2期)2020-04-07
鸭绿江·下半月(2020年1期)2020-03-23
鸭绿江·下半月(2019年12期)2019-10-21
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
全球定位系统(2015年4期)2015-02-28
旅游纵览(2014年8期)2014-09-10
浙江国土资源(2014年5期)2014-04-28
焦点(2014年3期)2014-03-11
