
基于多源点云数据的高程质量检查方法研究
2024-01-08 10:42陈远鸿张子康杨志敏
城市勘测 2023年6期
陈远鸿,张子康 ,杨志敏
(1.深圳市勘察研究院有限公司,广东 深圳 518000; 2.南京工业大学测绘科学与技术学院,江苏 南京 211800;3.武汉市测绘研究院,湖北 武汉 430022 )
0 引 言
近年来,随着测绘技术的快速发展,大规模空间数据的获取变得更加高效[1-2]。但由于地形复杂性以及采集方法的局限性,通过单一来源获得完整、高精度数据是困难的。因此,需要整合多个数据源来提高数据的准确性和完整性[3]。
本文介绍了一种基于多源激光点云数据比对的道路检查方法,数据来源包括车载点云、机载点云和人工实测坐标,检查对象为主道、匝道和边坡断面。本研究采用车载点云和机载点云来完成主道点云和匝道点云的检查,而对于边坡断面点云,主要采用机载点云,并通过人工实测的方式进行补充。
1 研究区域概况及数据获取
深圳市机荷高速起于宝安国际机场,终于龙岗荷坳,全长 44 km,是粤港澳大湾区东西向的交通中轴线,也是市域范围原二线关外南北约 30 km范围内唯一一条东西方向贯通性良好的干线道路。本文采用车载和机载两种激光点云数据,并结合人工实测数据,对机荷高速道路特征点进行质量检查,为建立实景三维模型、DEM模型提供了数据基础,测区范围如图1所示。

图1 测区范围图
车载激光点云数据是通过SSW车载激光建模测量系统实现的,扫描过程中车速控制在60~70 km/h内,采用的是中测瑞格Rigel VUX-1HA激光扫描仪。
点云精度校正用的是四维远见公司的SWDY软件,经滤波处理后得到地面点数据。由于点云密度过大,对后续点云的使用不利,因此经过抽稀处理,路面点云密度转为约25个/m2,平均点间距为 20 cm。机载激光点云数据则是通过SE-J500C机载激光雷达系统实现的,飞行速度控制在5~12 m/h内。采用芬兰Oy公司的TerraSolid软件进行点云精度校正,无须进行点云抽稀处理。路面点云密度为约22个/m2,平均点间距为 21 cm。两种点云的平面坐标系统相同,均采用深圳独立坐标系,高程系统均采用1956年黄海高程系。
2 研究方法及数据预处理
2.1 车载与机载点云数据高程对比方法
在对车载点云与机载点云进行高程差异比较时,理论上需要保证对比点之间的平面位置相同,然后再进行高程的比较。但是点云在空间中呈散乱分布,几乎不存在这样的对比点[4]。本文提出了一种高程对比方法,通过对车载点云进行局部平面拟合或构建三角网,获得与机载点云在平面位置上相同的车载点云上的点(插值出的点)。对于路面局部近似水平或存在一定的坡度(路面坡度最大不超过3%)的情况,机载点云与其平面位置相同的车载点云之间的高程差可以近似为该机载点云到平面[5](通过局部平面拟合或构建三角网得到的)的距离。即在图2纵剖视图中,点A和点B为车载点云中的点,点D为机载点云中的点,点C为点D的斜面投影点,点E为点D的竖直投影点。由于θ角足够小,CD之间的距离可近似于DE之间的距离。当θ角为0时,CD之间的距离等于DE之间的距离。通过上述方法,可实现高程差异的精确比较。

图2 点云投影纵剖面图
车载点云与机载点云之间的检查利用3Dreshaper软件进行点云之间比对检查。主要是路面车载点云与机载点云之间的差异情况。因此,在检查之前,需要将路面以外的点以及非重叠区域的点进行删除。以车载点云为参考对象(精度较高的点云),以机载点云为投射对象(精度较低的点云),将机载点云的每一个点投影到其附近的车载点云所构成的最近的那个平面,机载点到投影点的距离作为两者之间的差异值[6],如图3所示,红色点为参考点云,蓝色点投射点。此检查方法可以将大部分的机载点云与车载点云进行比对,并得到差异值分布情况[7-8]。

图3 车载点云与机载点云之间对比图
2.2 点云数据与实测点高程对比方法
点云与实测点之间主要检查的是外业实测点与临近点云中的点高程差异情况。对于较为稀疏的机载点云,可先对点云构建网格后,再将实测点与最近投影点进行高程差异比较。
2.3 点云数据滤波处理
为了提高地面点云的提取效果,在地面点云滤波前,先去除点云中的噪声点。去噪后,再利用点云滤波算法提取地面点云数据,将异常情况进行人工检查并改正,以保证所有的地面点提取完整。滤波前后对比如图4所示。

图4 点云滤波前后对比图
3 处理结果与分析
3.1 车载点云与机载点云高程对比检查
受外界条件的影响,车载主道点云与车载匝道点云在精度上有所差异,而机载点云不受路面曲折的影响。分别将部分主道、匝道的点云进行比对检查,以便更准确地反映实际情况。
(1)主道部分对比检查
以主道高程中误差0.02 m进行评价分析,部分车载点云与机载点云的主道高程比对结果如表1所示。
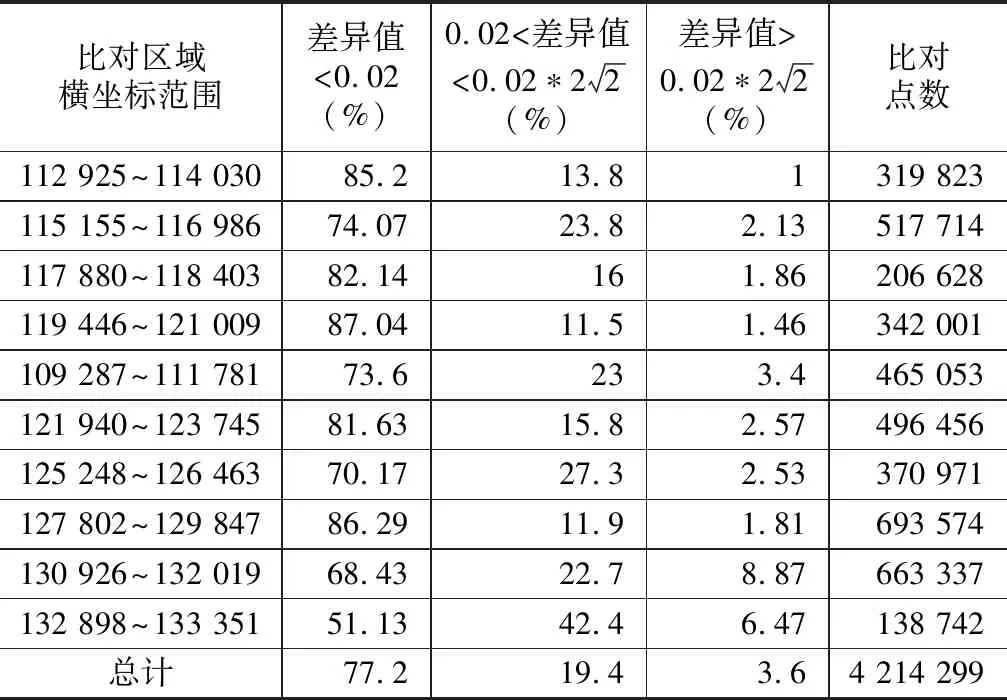
表1 主道各区域点云比对
(2)匝道部分对比检查
对于较为复杂的匝道,为准确比对匝道中,车载点云与机载点云差异情况,选择两者重叠区域较多的位置进行比对。以匝道高程中误差 0.03 m进行评价分析,清湖、秀峰、白泥坑三个匝道对比如表2所示。

表2 匝道各区域点云比对
3.2 车载点云主道与匝道对比检查
(1)重叠区域对比检查
在车载点云数据采集过程中,有部分匝道数据与主道数据重叠。对该重叠区域的检查,能够反映主道点云与匝道点云衔接的精度情况。以主道高程中误差 0.02 m进行评价分析,各重叠区域的比对情况如表3所示。

表3 主道与各匝道重叠区域比对
(2)重叠特征线对比检查
对于特征线的检查,在车载点云数据的基础上,采用自动和手工的方式进行提取,结果如图5所示。为核实主道特征线与匝道特征线的连接情况,对主道和匝道重叠区域进行特征线提取,检查特征线的间距,结果如表4所示。

表4 主道和匝道重叠特征线比对(单位/m)
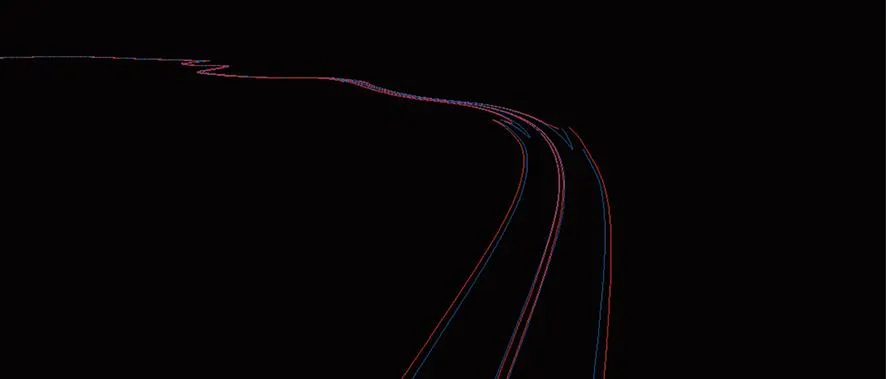
图5 特征线提取结果
3.3 机载点云与人工实测断面点对比检查
受边坡植被的遮挡,以及机载点云密度的影响,人工实测坐标往往距离机载点云较远。本文对机载点云进行网格化处理,将实测点与最近网格投影点进行比对,以此来反映实测坐标与点云坐标的高程差异情况(图6)。

图6 网格与实测断面示意图
点云高程中误差的技术指标为平地、植被稀疏覆盖区优于 0.10 m;山地、植被茂密覆盖区优于 0.20 m。本文将实测断面点分为两类,一类是平地、植被稀疏区域的;另一类为山地、植被茂密区域的。在机载点云密集区域中,共比对318个人工实测断面点,点云高程中误差为 ±8.0 cm;在机载点云稀疏区域中,共比对309个人工实测断面点,点云高程中误差为 ±17.1 cm。结果如图7、图8所示,满足限差要求。

图7 点云密集区域实测点对比图

图8 点云稀疏区域实测点对比图
4 结 语
本文以机荷高速公路为实验对象,提出了一种投影方法,将车载点云数据、机载点云数据与人工实测数据相结合,来实现该路段主道、匝道、边坡断面等路面类型的高程对比,结果表明精度满足要求,验证了该方法的可行性,为全要素道路高程质量检查提供了参考。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
数学物理学报(2021年1期)2021-03-29
中国交通信息化(2020年4期)2021-01-14
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
铁道通信信号(2020年8期)2020-02-06
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
中国交通信息化(2018年11期)2018-03-01
中国公共安全(2017年11期)2017-02-06
电源技术(2015年2期)2015-08-22
