
复杂条件下基于三维激光扫描技术的某过江隧道形变监测研究
2024-01-08 10:42周恒朱利明刘良金阮宏杰管栋良
城市勘测 2023年6期
周恒,朱利明,刘良金,阮宏杰,管栋良
(1.南京市江北新区公共工程建设中心,江苏 南京 211800; 2.南京工大桥隧与轨道交通研究院有限公司,江苏 南京 210004;3.南京工业大学,江苏 南京 211816)
0 引 言
随着交通事业的高速发展,隧道数量持续增长。隧道在建设或运营过程中,地面、周边建筑物负载及土体扰动、隧道周边工程施工等因素都会对隧道产生综合影响从而造成隧道结构变形。形变过大会引起隧道拱顶下沉,严重时甚至导致塌陷,其后果不可估量。因此,隧道形变监测是隧道正常建设和运营的有力保障。传统的隧道形变测量方法主要是通过全站仪和水准仪对隧道进行观测,虽然测量精度高,但获取观测数据量少,只能反映局部或特定点的信息,无法准确、有效地反映隧道整体变形。近年来,随着三维激光扫描技术的不断发展和三维激光扫描仪测量精度的不断提高,使得利用三维激光扫描技术监测隧道整体变形成为可能。与传统隧道变形监测技术相比,三维激光扫描技术是一种高效稳定的监测技术,具有采集速度快、高精度、高分辨率、采集数据量大、全自动、受环境干扰小、高全景非接触式扫描等优点,已被应用到地质灾害变形检测、隧道工程测量、桥梁检测、地形图测绘、古建筑物修复、工业检测与设计、三维建模等多个领域[1-4]。
文献[5]提出了一种可应用于变形监测的基于三维激光点云的隧道断面连续截取方法,该方法分为点云拼接、中轴线提取和断面截取三个步骤,并通过地铁隧道点云数据进行了验证。文献[6]提出了一种取代传统单点监测的隧道多点整体变形监测方法,并结合实际案例探讨了点云配准和坐标转换等问题。文献[7]提出了基于激光点云的隧道断面连续提取与形变分析方法,并将其应用于地铁隧道形变监测。文献[8]等人提出了基于Kd-tree和法向量估计的局部点云简化方法,并对BaySAC算法的三维激光点云二次参数曲面拟合方法进行改进,提高了变形监测中地铁隧道断面点截取的效率。文献[9]研发了一款经济适用且高效可靠的移动激光扫描监测系统,解决了架站式三维激光扫描监测效率低下的问题,并成功应用于盾构隧道收敛监测。文献[10]将移动式三维激光技术引入地铁隧道监测,采用推行式扫描方法快速获取隧道完整结构信息,并利用自动化后处理软件全面监测隧道结构变形信息。文献[11]提出了一种基于参考基准的隧道点云降维格网化形变分析法。
虽然目前针对三维激光扫描技术在隧道中的应用研究较多,但是隧道的种类及相关特性较为复杂,如某些隧道空间狭窄或隧道内存在复杂结构等。因此,较难有一种基于三维激光扫描技术的隧道变形监测方案适用于所有的隧道。本文结合某过江隧道变形监测项目,开展了复杂条件下的基于三维激光扫描技术的隧道变形监测研究。
1 工程概况
某过江隧道由南线和北线2个隧道组成,隧道全长 7 368 m,为双管双层八车道规模,每个隧道内径 13.3 m,为双向4车道,分上下2层。截至2019年12月,为世界同类隧道中规模最大、长度最长、地质最复杂的隧道。该隧道江北段上方由于长时间的堆土,在荷载压力持续作用下,隧道内部部分区域出现开裂现象,如图1所示。为保证隧道的安全运营,需定期监测隧道内部重点区域的形变情况,及时发现隧道内存在的安全隐患,保障过江隧道的安全。该隧道的受力面主要集中在隧道混凝土衬砌上部,其变形为整体形变。

图1 某过江隧道内部变形开裂图
该隧道过道内部空间狭窄,且存在管道、消防箱和走线架等设施,内部道路并非直线相连,需借助楼梯通行,如图2所示。此外,过道内每隔一段间距建有隔墙,无法通视。因此,传统的导线布设,建立控制点,以控制点为依托利用全站仪进行变形监测的方法较难实施。

图2 某过江隧道内部通道图
2 方案设计与点位布设
2.1 布测方案设计
结合本次工程特点和现场探勘情况,本文采用三维激光扫描技术进行隧道内部变形监测。三维激光扫描技术能提供视场内有效测程的一定采样密度的高精度点云数据,能够全面准确地反映监测对象的细节信息,有效避免了传统变形监测手段的局部性和片面性。此外,三维激光扫描技术对作业环境的光照条件没有要求,在光照较弱或黑暗的隧道照样能正常工作,且数据采集效率高,4~8分钟左右即能完成一个测站的数据采集,能很好地满足运营隧道一般只能在夜间较短时间内进行作业的要求。
为了准确监测到隧道内部的变形情况,分别在隧道南线和北线各选取了三处变形较大的区域,布置监测点,总计6个断面。在南线,3个断面分别位于2、3和4号逃生通道口附近,分别记作S2、S3和S4断面;在北线,3个断面分别位于3、4和5号逃生通道口,分别记作N3、N4和N5断面,如图3所示。

图3 监测断面位置示意图
在每个断面上,各布设4个监测点,如图4所示。其中,三个监测点布设在隧道内的水平面上,作为基准点。三个地面基准点可拟合出平面,用于三维激光点云数据配准。第四个监测点设置在隧道管片衬砌上,作为断面截取的基准点,用于监测隧道的整体变形。

图4 标靶球监测点和静力水准仪监测点布设示意图
2.2 测点布设
在三维激光扫描监测中,一般利用配套的标靶球作为目标识别物。但是,常规变形监测中的测钉无法固定标靶球。由于隧道内部定期有工作人员进行维保工作,无法长期将标靶球固定在监测点上,一方面可能会影响其他工作人员的维保工作,另一方面标靶球也有可能遭到破坏。因此,拥有一个便于安装、易于保护,同时方便标靶球安装和拆卸的装置显得尤为重要。
基于此,设计了一款满足上述要求的标靶球强制对中基座(图5)。考虑到隧道内部为坚硬的钢筋混凝土结构,需通过膨胀螺丝将标靶球强制对中基座固定到监测点上,实现标靶球的任意安装和拆卸,同时保证监测点位置不变。标靶球的安装效果如图5所示。按照此方法,分别在6个选定的监测断面上布置四个监测点,如图6和图7所示。

图5 定制的标靶球底座及其安装

图6 南线3个断面的点位布设情况,从左至右分别S2、S3和S4

图7 北线3个断面的点位布设情况,从左至右分别N3、N4和N5
3 外业观测和内业数据处理
3.1 外业观测
外业观测采用的仪器为FARO公司的Focus3d X330三维激光扫描仪。该仪器的扫测距离为0.6~330 m,测距精度为 ±2 mm。由于隧道采取南北线单双日交替封闭,夜间封闭维护时间为23点—6点。因此,本项目每期观测时间为期两天,一天南线一天北线,均为夜间观测。本项目为期两个多月,其中北线进行了7期观测,南线进行了6期观测。前四期观测频率为每周一次,从第五期开始观测频率调整为每两周一次,具体观测日期如表1所示。为了保证观测精度,每站连续观测两次。三维激光点云数据类型为xyz格式,本项目累计观测数据为 16.55 GB。

表1 观测时间表
3.2 内业数据处理
本文利用FARO公司配套的三维激光扫描数据处理软件Faro Scene开展内业数据处理工作,数据处理流程如图8所示。首先将扫描数据文件导入Scene软件,然后对扫描文件进行去噪处理,包括深色扫描点过滤、距离过滤、离群点过滤、边缘伪像过滤。深色扫描点过滤移除低反射返回值的扫描点,对应反射系数阈值设为200。距离过滤基于距离移除与激光扫描仪有指定距离的扫描点,距离范围设为0~20 m。离群点过滤检查扫描点的二维栅格单元格是否包含距离与扫描点本身相似的足够大的点百分比,栅格尺寸设为3个像素,距离阈值设为 0.02 m,分配阈值设为50%。边缘伪像过滤删除边缘伪像,同时保留墙、地板或桌子等良好的表面。

图8 内业数据处理流程图
数据去噪处理完成后,利用Scene软件识别标靶球,标靶球半径设为 0.072 5 m,并以此为基准进行配准。由于配准是以水平地面上的3个基准监测点作为基准,所以在配准前需去除自动识别出的位于隧道衬砌壁上的4号标靶球以及其他被错误识别为标靶球的目标,只保留地面上识别出的三个标靶球。
4 结果分析
为了准确分析该过江隧道的形变信息,分别采用了两种隧道变形监测技术。第一种是常规的基于三维激光扫描技术的隧道变形监测方法[6-7,11-15],首先利用三维激光扫描仪对隧道进行扫测,得到隧道的三维结构模型,然后通过断面提取得到断面曲线。通过对同一位置的不同期断面数据进行对比,得到隧道断面的形变信息。第二种是根据标靶球提取监测点位置,计算基准监测点与变形监测点之间的距离变化,获取隧道形变特征。
4.1 隧道断面曲线变形分析
基于常规的三维激光扫描技术的隧道变形监测方法,本文截取了三维点云隧道断面,通过分析截面曲线的变化来监测隧道管片衬砌的整体变形信息。以北线隧道N5号断面的七期观测数据为例,从图9可以看出,三维激光扫描仪观测的点云数据主要集中在Y方向的-1.18~-0.82区间内,无法获取完整的隧道断面曲线信息,这是因为隧道内部管道、走线架和其他设施遮挡了三维激光扫描仪对隧道管片衬砌的观测。其他5个断面存在相同的情况。

图9 隧道北线N5号断面截取的点云观测数据及其曲线拟合
为了便于分析隧道断面的变形,本文通过Matlab软件对截面的点云数据进行了拟合,如图9所示,并以第1期的隧道断面曲线为基准对第2-7期的断面曲线进行比较分析,给出N5号断面的形变信息。表2给出了N5号断面七期数据的曲线拟合精度和第2-7期拟合曲线相对于第1期的变化情况。从表3可以看出,曲线拟合误差最小值为 9 mm,最大值为 25 mm,平均误差为 17 mm。另一方面,断面拟合曲线的最大形变量为 6 mm,其余形变量均小于 5 mm,小于曲线拟合误差。其他5个断面分析结果相似。由于当前的隧道变形量较小,位于曲线拟合误差之内,所以基于三维激光点云数据提取断面曲线,进而分析隧道整体形变的方法目前暂不适用于该过江隧道。

表2 隧道北线N5号断面曲线拟合误差和变形情况

表3 隧道北线N5号断面数据处理结果
4.2 基于标靶球球心位置变化的变形分析
如上节所述,不同于常规的地铁隧道监测,本次隧道监测存在其特殊性,隧道内部狭窄,隧道壁及顶部存在许多管道及其他设备,如图2所示。因此,三维激光扫描仪扫测之后,较难提取到完整的断面曲线。虽然曲线拟合方法可以将缺失的曲线部分拟合起来,但是由于断面图上曲线的中断位置较多且间隔较大,曲线拟合方法引入了较大的拟合误差,从而影响监测结果的准确性。
为此,本文提出了基于标靶球提取监测点位置,利用标靶球球心位置计算基准监测点与变形监测点之间的距离,并通过距离变化来监测隧道形变的方法。其中,位于地面的1-3号标靶球作为基准点,位于衬砌上的4号标靶球作为变形监测点。每期数据处理时,分别计算平面位置上1-3号点间的平面线段距离(D12、D13和D23)以及1-3号与隧道衬砌上4号点之间的斜线段距离(D14、D24和D34)。变形分析时,以第一期的观测结果作为参考基准,计算平面线段和斜线段的距离变化。
表3给出了隧道北线N5号断面的数据处理结果。图10(f)给出了隧道北线N5号断面上的斜线段距离变化趋势图。从整体变化趋势来看,N5号断面上的三个斜线段长度逐渐增大,其中D14变化范围在 6 mm以内,D24变化范围在 3 mm以内,D34变化范围在 8 mm以内。图10(a-e)给出了其余5个断面的斜线段长度变化趋势。

图10 隧道监测断面斜线段距离变化趋势
为了进一步分析隧道变形情况,表4统计了6个断面的三条斜线段在整个观测周期内的最大变化值。由于本项目使用的三维激光扫描仪的量距精度在 5 mm左右,从表5中可以看出,断面S3和S4的三个斜线段长度变化只有1~2 mm,可认为其在观测周期内没有变形。断面S4的斜线段长度变化为4~6 mm,位于仪器量距精度临界值附近,可认为其所处位置没有变形。在N4号断面,虽然D34的最大变化值为 9 mm,但D14和D24斜线段变化范围均在 1 mm以内。在N5号断面,D14和D24变化范围可认为在误差范围之内,但D34的最大变化为 8 mm。在所有的断面中,N3号断面的变化最为明显,除D14在误差范围内,D24和D34的最大变化均达到了 9 mm,但并未明显超出仪器误差范围。

表4 隧道6个监测断面的最大形变量
在利用三维激光扫描仪进行定期观测的同时,在隧道的另一侧,如图4所示,安装了一组静力水准仪。图11和图12分别给出了三维激光扫描仪观测周期内隧道南线和北线静力水准仪变形监测变化趋势。在三维激光扫描仪观测周期内,隧道南线静力水准仪监测到的最大形变为 6 mm左右,隧道北线静力水准仪监测到的最大形变为 4 mm左右。无论是南线还是北线,其最大形变量恰好与三维激光扫描仪的量距精度相当。因此,在本项目观测周期内,利用三维激光扫描技术较难监测到隧道的当前形变信息和变化趋势。本次三维激光扫描结果也表明了隧道内并未出现较大(厘米级)的形变变化,与静力水准仪的监测结果基本一致。
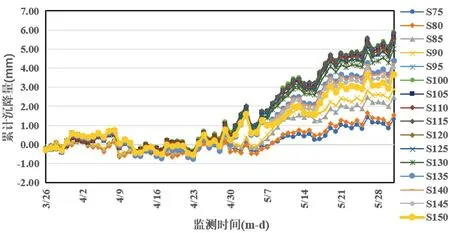
图11 隧道南线静力水准仪变形监测变化趋势

图12 隧道北线静力水准仪变形监测变化趋势
5 结 语
三维激光扫描技术是当前隧道变形监测的主要手段之一。由于本项目中的隧道内部结构复杂,导致常规的断面曲线提取方法无法应用。针对该隧道特点,本文提出了基于标靶球提取监测点位置,并计算基准监测点与变形监测点之间距离,通过监测距离变化来监测隧道形变的方法。本文处理了隧道内6个断面时间跨度为2个多月的7期监测数据。结果表明,4个断面(N4、S2、S3和S4)上的斜线段长度最大变化值基本都小于 6 mm,其中S3和S4上的斜线段长度变化值最大均小于 2 mm,都位于仪器测量误差范围之内。2个断面(N3和N5)的斜线段长度最大变化值达到了8~9 mm,但并未明显超出仪器测量误差范围。隧道另一侧的静力水准仪监测结果表明,在三维激光扫描仪观测期间,隧道南线的最大形变为 6 mm左右,隧道北线的最大形变为 4 mm左右,均在仪器测量误差范围之内。本次三维激光扫描结果表明隧道内并未出现较大(厘米级)的形变变化,与静力水准仪的监测结果基本一致。
猜你喜欢
当代陕西(2022年4期)2022-04-19
测绘工程(2018年3期)2018-03-20
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
齐鲁周刊(2015年31期)2015-08-19
现代营销·经营版(2015年3期)2015-04-20
测绘学报(2015年4期)2015-01-14
大地测量与地球动力学(2014年3期)2014-02-13
河南城建学院学报(2014年2期)2014-02-09
西藏人文地理(2013年2期)2013-12-05
现代营销·经营版(2013年5期)2013-05-14
