
城市轨道交通结构形变监测方法及应用
——以邻近基坑开挖的影响为例
2024-01-08 10:42赵少鹏王怡程良水
城市勘测 2023年6期
赵少鹏,王怡,程良水
(杭州市勘测设计研究院有限公司,浙江 杭州 310012)
0 引 言
随着中国城市化进度的加快,城市人口的迅速增长,地上公共交通已不能满足人口增长带来的交通需求,因此,近年来,我国地下交通蓬勃发展,越来越多的城市开始兴建地铁线路。以浙江省为例,目前已有多地陆续开建城市轨道交通项目,其中杭州市目前已运营的轨道交通总里程已达到 516 km。
受到地质条件、施工环境和施工技术等多种因素影响,轨道交通设施自运营开始就存在不同程度的结构病害与安全隐患,加之周边大量市政或商业开发建设,会导致既有轨道交通结构出现形变,造成结构性能指标下降;结构形变严重时,会对行车安全造成重大威胁。因此,为了确保轨道交通结构的安全,对其进行结构形变监测是非常重要的。
1 形变监测对象及方法
城市轨道交通结构监测对象包括地下车站和区间、高架车站和区间、地面车站和区间以及附属建(构)筑物的结构。监测项目一般包括:水平位移监测、竖向位移监测、收敛监测等。
由于轨道交通结构内观测条件差,为保证监测项目精度,首先建立平面控制网和高程控制网;平面控制网、高程控制网是水平位移监测、竖向位移监测、收敛监测的监测基准。
1.1 平面控制网
由于城市轨道交通结构大部分建设在地下,与地面构筑物相比,空间相对封闭,且呈狭长带状分布,不利于监测控制网布设。因此,水平位移监测平面控制网宜采用导线测量布设,并建立独立坐标系[1],独立坐标系方向分别沿里程方向与垂直里程方向,一般以沿里程方向为X轴,垂直于里程方向为Y轴。平面控制网布设如图1所示。
1.2 高程控制网
竖向位移监测高程控制网可采用国家高程系统,也可以采用自定义高程系统,高程控制网应具备稳定、可靠的高程起算点。高程控制网的工作基准点宜布设在外部作业影响范围外的车站内,数量应不少于3个,高程控制网布设示意图如图2所示。
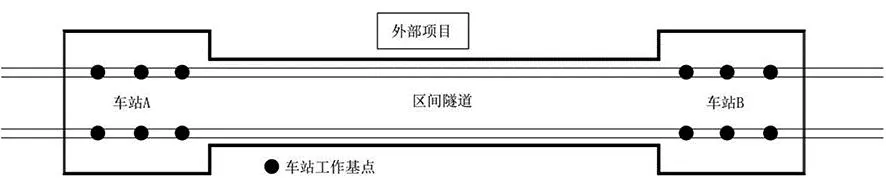
图2 高程控制网布设示意图
1.3 水平位移监测
水平位移监测以平面控制网为基准,在观测支架上观测平面控制网工作基准点棱镜进行后视定向,然后观测布设在断面上的监测点(如棱镜),采集坐标。监测点水平位移为本次测量值与初始值在Y方向的坐标差值,计算公式如下:
yi=Yi-Y0
(1)
式中yi为监测点水平位移累计变化量,Yi为监测点本次测量值,Y0为监测点初始值。
1.4 竖向位移监测
竖向位移可通过三种方式进行监测:①精密水准测量;②三角高程测量;③静力水准测量。采用精密水准测量时,水准路线应从高程控制网工作基准点出发,沿线路形成闭合路线,由工作基准点高程计算各监测点高程,通过计算各监测点历次高程之差求取竖向位移;采用三角高程测量时,与水平位移监测方法相同,在观测支架上观测平面控制网工作基准点棱镜进行后视定向,然后采集监测点坐标;采用静力水准测量时,通过测量每个测点液位高度变化或不同测点间的液体压力变化来计算竖向位移。竖向位移计算公式如下:
hi=Hi-H0
(2)
式中hi为监测点竖向位移累计变化量,Hi为监测点本次高程值,H0为监测点初始高程值。
1.5 收敛监测
收敛监测可采用全站仪观测布设在隧道两腰处的监测棱镜或采用手持激光测距仪测量收敛测线。采用全站仪进行收敛监测观测方法与水平位移监测方法一致,通过后方交会进行后视定向,然后采集隧道两腰处的监测点坐标,计算两个监测点的距离与初始距离变化。采用手持激光测距仪进行收敛监测时,取多次收敛测线稳定测量平均值为本次测量值,与初始值对比,计算收敛值。收敛监测计算公式如下:
(3)
或:
li=Li-L0
(4)

2 自动化监测系统
由于城市轨道交通运营时间长,监测人员能够进入内部进行作业的时间相对较短,因此,优先采用自动化系统对其结构形变进行监测。自动化监测的特点:①监测频率高,观测精度高;②相较于传统的通讯技术产品,其具备传输速度快、延迟率低和稳定性高等优点[2];③不受运营时间限制,可根据需要设置观测时段;④速度快,能够实时快速获取变形量,并绘制时程曲线。
自动化监测系统是利用变形监测软件系统,远距离向测量机器人传输测量指令,由测量机器人在规定的时间段内依照规定的测量流程智能地开展数据采集,并将所采集的数据通过通讯模块传输回服务器并存储,再由数据分析模块开展分析计算,进而给出每个监测点的三维坐标,通过比较历次坐标数值的变化计算出变形数值并制作出变形过程中的时程曲线。自动化监测系统组成如图3所示。

图3 自动化监测系统组成图
3 工程实例
3.1 工程概况
本项目地下设置两层地下室,基坑由杭州某特教综合楼地下室基坑与地铁车站C出入口及1号风亭地下通道基坑两部分组成,开挖深度分别为 10.65 m、9.84 m,安全等级为一级。项目北侧为城市道路,道路下方为已运营杭州地铁2号线某地铁车站。
依据支护设计资料,新建地下通道基坑紧邻车站结构,距离区间隧道最近水平距离约 3.9 m;特教综合楼基坑结构外墙与地下隧道区间距离约 26.3 m;该项目与轨道交通相对平面位置示意图如图4所示、相对剖面位置示意图如图5所示。

图4 相对平面位置示意图

图5 相对剖面位置示意图
3.2 场地岩土工程条件
依据岩土工程勘察资料,该项目基坑支护涉及的土层及其物理力学性质指标列于表1中。

表1 土层物理力学性质指标
3.3 监测内容和方法
该基坑工程位于城市轨道交通控制保护区[3]50 m范围内,基坑开挖影响区间隧道与地铁车站。为不影响轨道交通的正常运营,本项目轨道交通结构监测采用自动化监测方案,监测对象为车站和区间隧道,监测内容以水平位移、竖向位移和水平收敛为主。自动化监测系统设置定时坐标采集,控制网工作基准点坐标及监测棱镜初始值坐标存储在计算机数据库中,坐标采集时全站仪先通过网络从计算机数据库中读取控制网工作基准点数据进行后视定向,后视定向经平差计算精度满足设置要求后,再根据设置好的监测断面进行监测点坐标采集,然后将坐标数据通过网络传输回计算机数据库中,以当天多次测量的平均值作为监测点的坐标计算各个监测项目的变化量。水平位移、竖向位移及收敛按照公式(1)~(3)进行计算。该项目监测点布设如图6所示。

图6 监测点布设图
依据本项目设计预评估报告,各监测项目控制值、报警值及预警值如表2所示。按照本项目施工顺序,进行分阶段控制:①围护结构施工阶段,各监测项目报警值<1.5 mm;②地下通道基坑施工阶段,车站水平位移报警值<3.6 mm,其他监测项目报警值<3 mm;③特教楼基坑施工阶段,车站水平位移报警值<4.8 mm,其他监测项目报警值<4 mm。

表2 监测项目控制值、报警值及预警值
3.4 自动化监测数据分析
本项目自2018年10月—2019年10月进行桩基施工,2019年11月—12月进行出入口及风亭地下通道土方开挖,2020年1月—4月进行出入口及风亭地下通道主体施工,2020年6月—12月进行特教综合楼基坑土方开挖,2021年1月—4月进行特教综合楼地下主体施工,2021年4月底基坑施工达到±0,2021年5月进行上部主体施工。
本项目各测项累计值随时间变化曲线如图7~图12所示。由曲线可以看出随着基坑深度的不断开挖,轨道交通结构的形变也随之发生,越靠近基坑部位变形量越大,当地下室施工至±0后,变形逐渐稳定并有所回落。其中,在桩基施工阶段对轨道结构产生影响较小,各测项最大累计变形量为 1.2 mm,小于设计报警值;在出入口及风亭地下通道土方开挖施工阶段各测项变形量均开始增加,最大累计变形量为 2.5 mm,小于设计报警值,且随着地下室地板结构浇筑完毕后部分回落;在特教楼基坑开挖及地下结构施工阶段轨道交通结构变形量进一步增加,此阶段基坑开挖作业面大,时间周期长,基坑施工导致的时空效应明显,各测项中水平位移累计变化最大,达到了 4.7 mm,未超设计控制值,变化特征与场地地质条件基本吻合,随着地下结构施工结束,轨道交通结构变形亦逐渐趋于稳定。

图7 上行线累计水平位移随时间变化曲线

图8 上行线累计竖向位移随时间变化曲线

图9 上行线累计水平收敛随时间变化曲线

图10 下行线累计水平位移随时间变化曲线
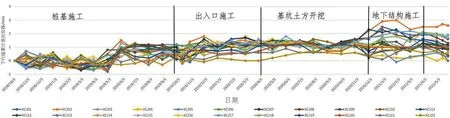
图11 下行线累计竖向位移随时间变化曲线

图12 下行线累计水平收敛随时间变化曲线
由于本项目涉及的城市轨道交通结构大部位于性状较差的黏质粉土与淤泥质粉质黏土中,但底部位于性状较好的可塑~硬可塑状粉质黏土或黏土中,因此在受周边外部作业影响会产生一定量的形变,其形变以往基坑方向的水平位移为主,相应的水平收敛也会产生影响,竖向位移变化相对较小,各项目监测项目数据变化与地质条件基本吻合。经监测成果分析认为,该项目形变监测方案科学、合理,监测数据可靠,有效保障了基坑施工过程中城市轨道交通的安全运行,达到了项目预期要求。
4 结 语
城市轨道交通结构受周边外部作业影响会产生形变,一个完善的监测体系能及时、准确地掌握轨道交通结构形变的变化趋势,为城市轨道交通结构病害治理提供数据支撑,为其安全运营提供保障。
猜你喜欢
机械工业标准化与质量(2022年3期)2022-08-12
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
当代陕西(2020年23期)2021-01-07
装备制造技术(2020年3期)2020-12-25
水电站设计(2020年4期)2020-07-16
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
湖南畜牧兽医(2016年3期)2016-06-05
智能建筑电气技术(2015年5期)2015-12-10
全球定位系统(2015年4期)2015-02-28
