一种SAR成像区域规划方法及软件可视化界面实现
2024-01-12 02:27邢智勇莫亚军
舰船电子对抗 2023年6期
邢智勇,陈 晔,莫亚军
(中国航天科工集团有限公司第三研究院三十五研究所,北京 100010)
0 引 言
合成孔径雷达成像技术是一种被广泛应用的二维雷达成像技术,利用雷达平台的运动来等效获得一个虚拟的大孔径天线,从而获得具有方位和距离两维高分辨率的雷达图像。与光学、红外等传感器相比,合成孔径雷达具有全天候、全天时工作能力的独特优点,在战场侦察、目标打击、气象遥感、速度测量等军事、民用领域被广泛应用[1]。针对SAR成像的特点,对地面上某区域能否成像需要考虑雷达功率、增益和目标后向散射能量大小,可以根据成像雷达方程来评估,在满足图像最小信噪比(SNR)的情况下,实现对某区域的一定分辨率成像。由此可知,在不考虑只针对某特定地面场景的前提下,雷达的成像范围主要取决于雷达的作用距离、扫描范围等系统参数信息。但雷达方程只能得到某个点回波的信噪比,而且波束扫描范围在地面投影的计算也比较复杂,故实际应用中能在给定最小成像信噪比的情况下进行快捷成像区域规划,将所有满足条件的点进行输出并直观表示,这在实际工程应用中具有较为重要的意义。
本文中设计的主要使用方向为无人机携带雷达SAR成像时可成像区域选择或者实时雷达波束解耦。在无人机携带雷达SAR的匹配区选择中,本文中的可视化界面可以方便地得到雷达扫描范围中所有满足分辨率的成像点,大大简化了选取成像区后还要核算成像参数的步骤,提高了工程效率。在机载SAR的使用中,本软件可以根据规划航迹进行波束解耦,显示机载轨迹上雷达的可成像区域。
1 成像区规划约束
雷达扫描区域的规划从不同角度推导雷达可成像边界条件,根据不同的成像约束确定不同的边界条件,满足所有边界条件的区域即是满足成像需求的区域。雷达的成像约束主要包括扫描范围的地面投影位置、成像分辨率和功率约束等。
雷达扫描范围的地面投影位置是根据雷达的作用距离和雷达姿态、波束扫描角等输入参数,对雷达姿态进行坐标系转换,在完成坐标系转换后,即可得到雷达波束的扫描范围在地理坐标系中的投影。
雷达成像分辨率主要影响对雷达的功率需求、积累时间等参数设计。在给定雷达北天东三维速度的情况下,根据雷达方程即可得满足给定分辨率时,不同波束指向角度下雷达的作用距离。
1.1 雷达扫描范围
在根据雷达姿态和波束扫描范围确定雷达在地面的投影时,还需要根据雷达的姿态进行坐标系转换。实际过程中主要应用的坐标系有:
(1) 地理坐标系St(简称t坐标系)。当地北-天-东地理坐标系中,原点ot取在雷达质心上,xt轴指向北,yt轴垂直于当地水平面指向天,zt轴指向东。
(2) 导航坐标系Sg(简称g坐标系)。原点og取在雷达质心,由地理坐标系绕otyt轴逆时针旋转A角度得到。xg轴平行于由上一导航点指向下一导航点(或目标)的方向,yg轴垂直于当地水平面指向天,og-xgygzg构成右手坐标系。
(3) 雷达坐标系Sb(简称b坐标系)。原点ob取在雷达质心上;xb轴与雷达纵轴一致,指向雷达阵面;yb轴位于雷达纵向平面内,垂直于xb轴指向雷达背面;ob-xbybzb构成右手坐标系[2-3]。

图1 雷达坐标系示意图
设俯仰角为ϑs,偏航角为ψs,滚动角为γs,通过坐标系转换的方式计算雷达波束指向角。将雷达与目标连线在雷达坐标系下各分量的相对角度分为2个阶段,先是得到雷达与目标连线P1P在导航坐标系下的分量[Δx,Δy,Δz]T,其中P1P与导航坐标系间的夹角分别为视线俯仰角qf、视线方位角qh。其关系如下:
(1)
此时的视线方位和视线俯仰角在雷达坐标系中,往往通过设置雷达的俯仰方位视线角扫描范围来约束雷达的成像能力;然后进行坐标转换,将其转换到地理坐标系中,即可通过投影的方式得到雷达的成像区域。
雷达将波束指向从雷达坐标系转换到地理坐标系需要考虑2个方面,即雷达的姿态和速度。雷达的姿态决定了雷达坐标系Sb与导航坐标系Sg的坐标关系。根据前述中坐标系定义可知,雷达坐标系Sb相当于导航坐标系Sg在x-o-y平面内以o点为中心旋转ϑs,再在x-o-z平面内以o点为中心旋转ψs,最后在y-o-z平面内以o点为中心旋转γs得到。而雷达速度的水平分量决定了A角,由于导航坐标系的定义就是从本时刻导航点指向下一时刻导航点,故A角即是雷达速度方向与北向的夹角,通过将导航坐标系Sg旋转A度即可得到地理坐标系St。雷达的坐标系转换框图如图2所示。

图2 雷达波束扫描范围地理系投影几何关系转换
经过以上设计,可以根据雷达姿态条件和雷达波束扫描能力,计算出雷达实际可覆盖区域。
1.2 雷达方程与分辨率
雷达的波束解算确定了雷达波束覆盖范围。根据雷达方程,除了雷达增益、功率、噪声系数等自身能力,雷达作用距离与成像分辨率、斜视角、速度等成像条件相关,因此需要根据不同分辨率需求和成像条件,核算出雷达作用距离。结合雷达波束覆盖能力,得到雷达可成像区域在地理坐标系的投影。典型的成像场景如图3所示,雷达在经过回波积累的过程中从P1到P2点,根据此时的速度v,斜视角α,雷达与目标间距R1等参数即可判断雷达的成像分辨率是否满足需求。SAR成像的雷达方程如下[2]:
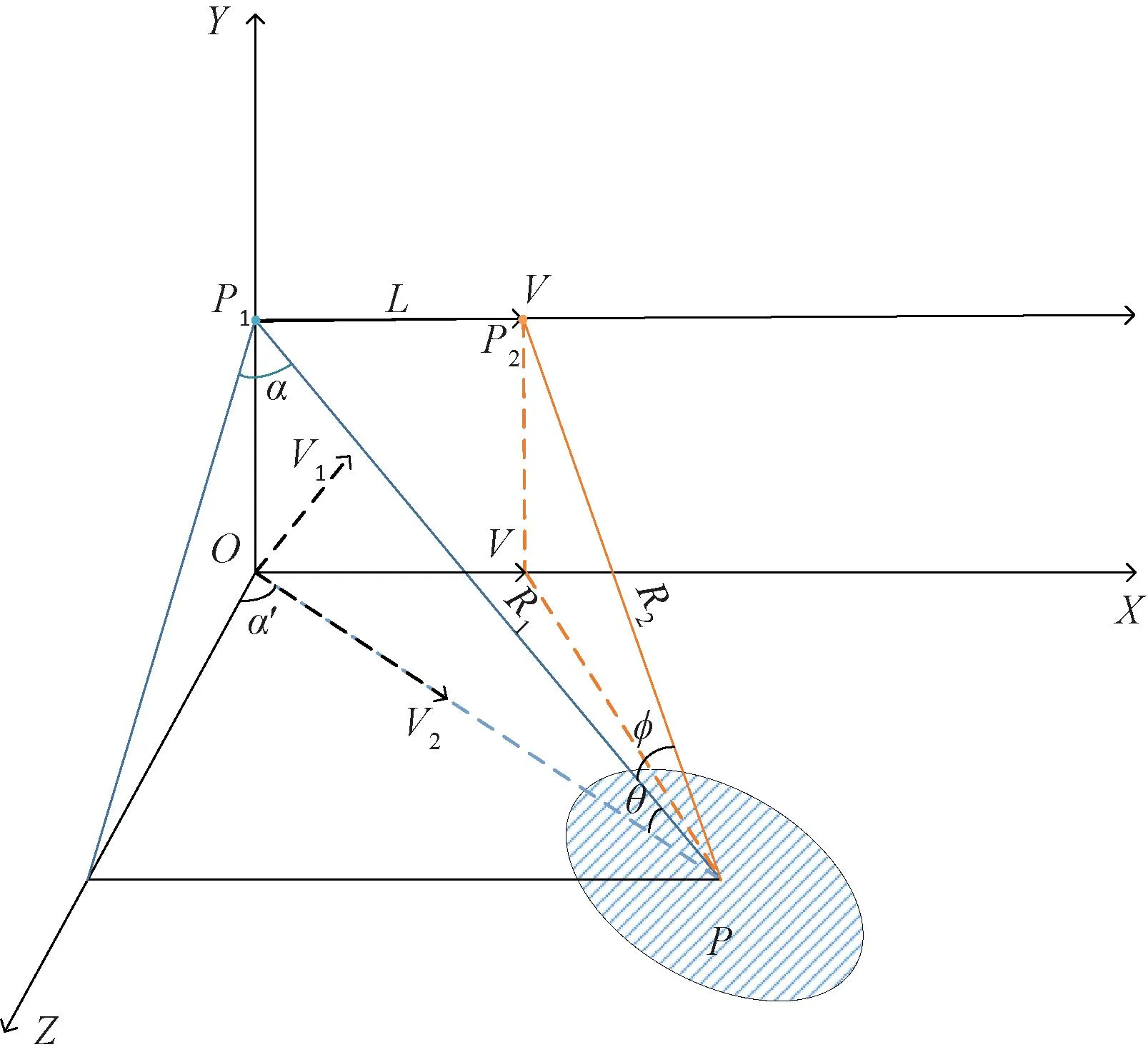
图3 雷达坐标系下成像场景
(2)
式中:Pav为平均发射功率;G为天线功率增益;λ为雷达工作波长;σ0为目标后向散射面积;Fn为接收机噪声系数;K为玻尔兹曼常数;T0为接收机温度;Ls为系统损耗;V为雷达速度;θi为波束入射角;α′为斜视角(波束中心与速度夹角的余角)的地面投影,即地面斜视角[4]。
(3)
也就是说,在不同的地面斜视角情况下,相同的雷达分辨率带来的最大雷达作用距离是不同的[5]。
根据这个关系得到,对于给定的分辨率ρr,在波束扫描范围不同时,满足最小雷达信噪比的成像距离。这是本文设计雷达成像区域规划软件时的第2个约束,在给定分辨率和最小可成像信噪比的情况下,可成像最大斜距随地面斜视角变化而变化的约束条件。在扫描范围内雷达目标斜距小于边界条件的区域内,雷达可以成出满足分辨率的图像。
2 软件实现
本设计通过MATLAB中的GUI函数界面实现,实现界面如图4所示。界面左侧为雷达输入信息和成像需求约束,分别为雷达位置、姿态、速度输入以及雷达的波束扫描角度、作用距离和雷达左右视设定,通过第1节中波束解算,根据这些参数可得到雷达的波束能满足的扫描区域,在右侧成像区域规划结果中表现为主要约束成像区域的第1个约束。雷达分辨率决定了雷达在不同斜视角情况下雷达的成像距离,这是雷达成像区域规划的第2个主要约束。综合2个约束条件,可得到雷达实际可成像区域在地理坐标系的投影。左侧涂色区域代表了规划出的雷达可成像区域,根据地面点间距对区域网格化,并按照间隔将成像点的具体参数输出。

图4 成像区规划软件
设计出的典型结果如图5所示。
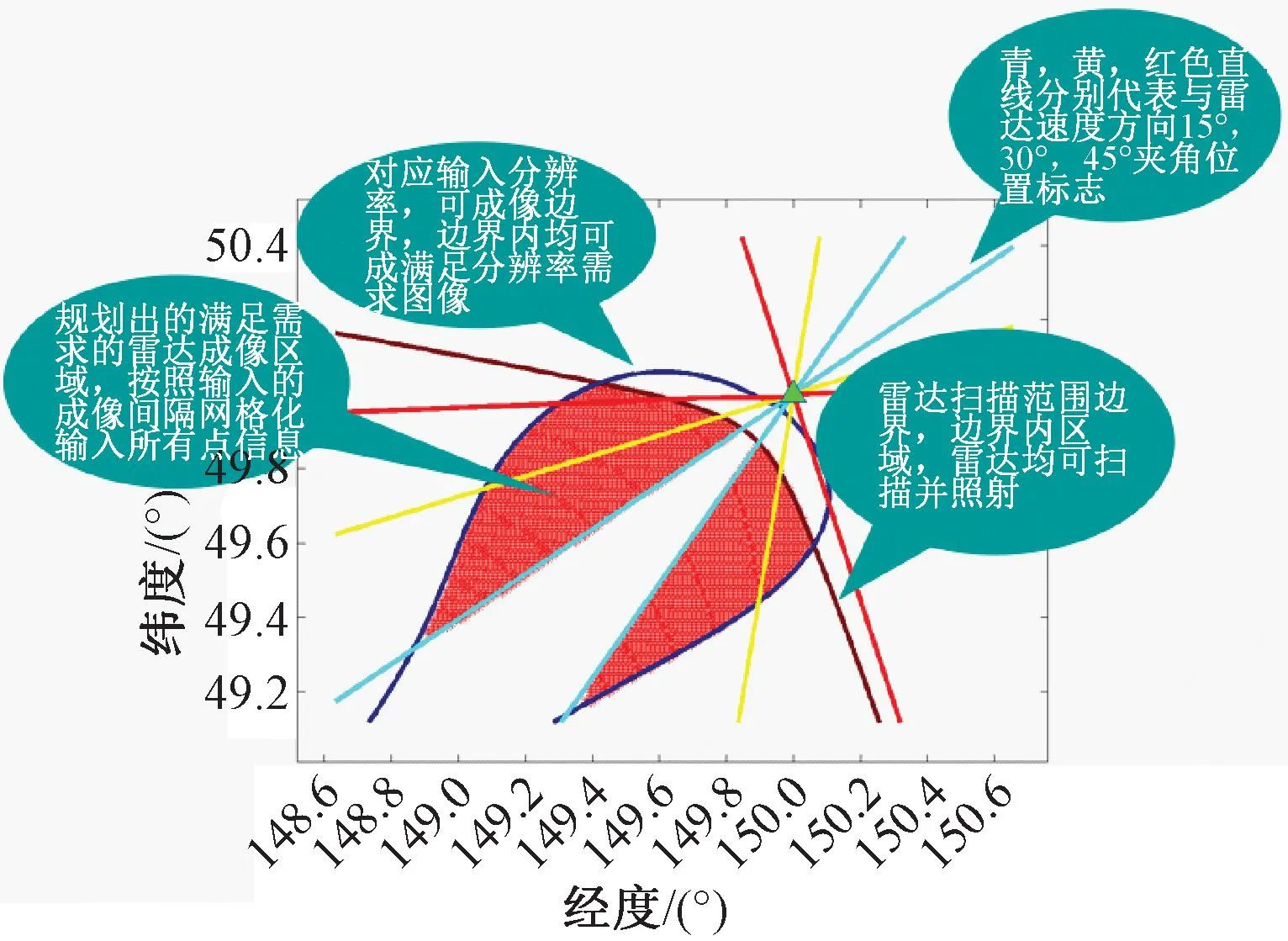
图5 雷达成像区规划GUI函数规划结果及注释
3 仿真验证
仿真设计主要针对同一姿态不同分辨率约束和同一分辨率不同姿态条件2种方式进行,具体雷达参数如表1所示。

表1 仿真时的雷达参数
根据表1的参数可得出如下仿真结果。图6分别为航向角为135°、90°、45°、0°时规划成像区域的结果,此时设计分辨率为15 m×15 m,飞机水平速度方向为北偏东127°。
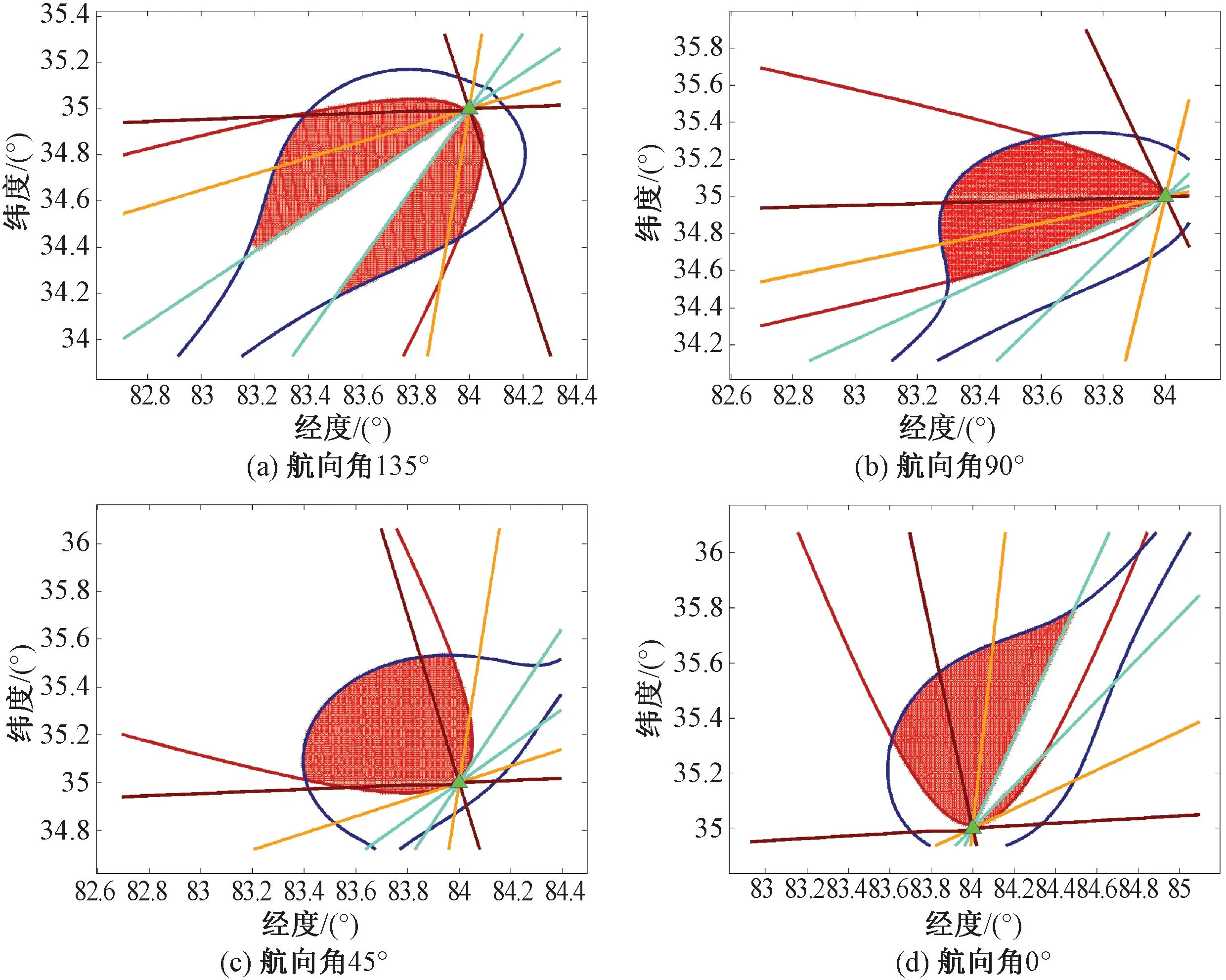
图6 在不同扫描方位情况下成像区规划函数运行结果
图7分别为雷达不同成像分辨率时成像区域规划结果,此时航向角为135°,雷达水平速度方向为北偏东127°。
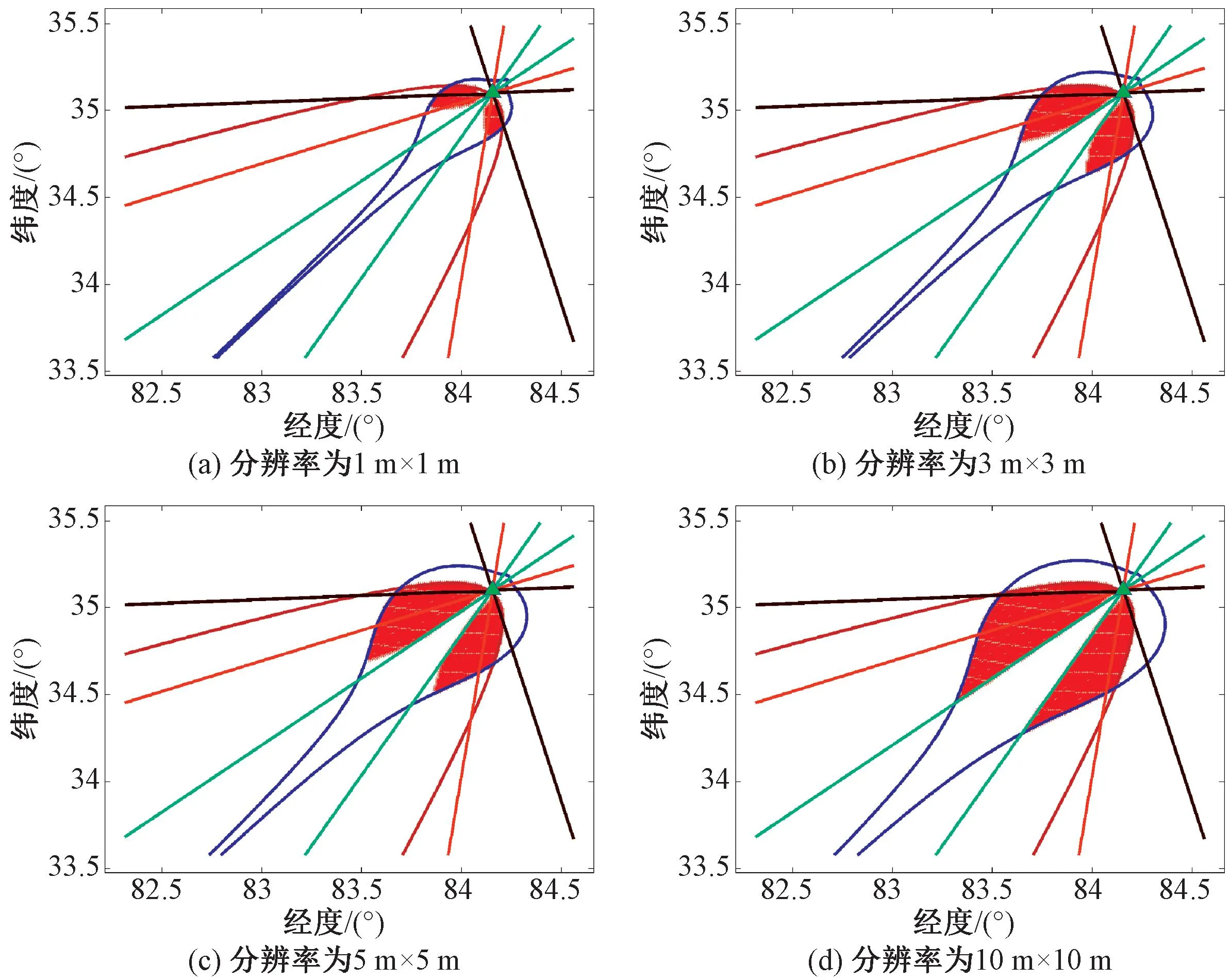
图7 不同分辨率情况下成像区规划函数运行结果
对于满足成像需求的点,将其成像时的几何关系等存储为mat文件,导出为表格实例如表2所示。
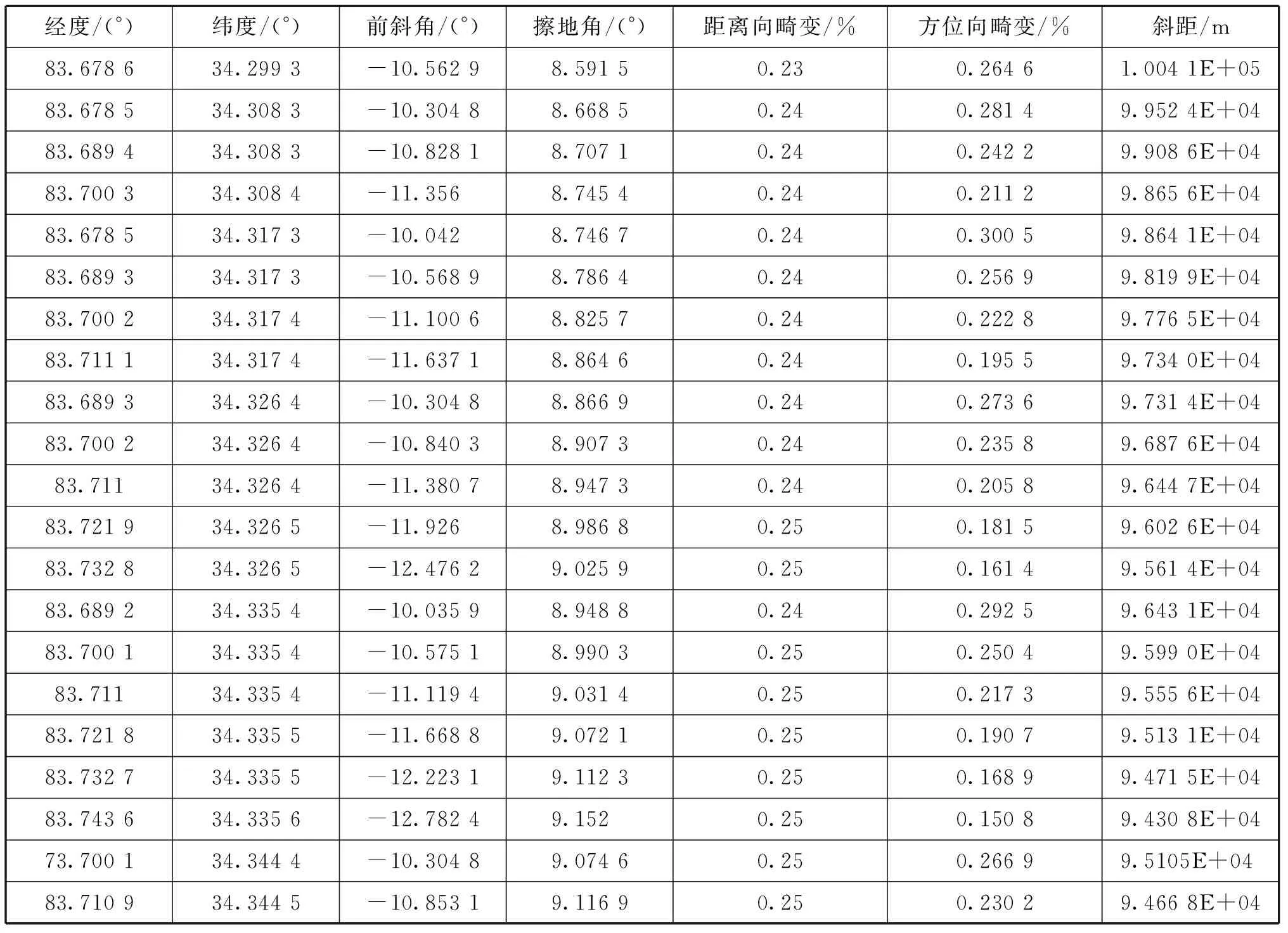
表2 规划出成像点位置等部分参数
4 结束语
本文通过分析推导完成了对雷达波束指向及扫描范围的解算,分析了不同运动状态和斜视角情况下满足不同分辨率需求的最大成像距离,综合2个约束条件得到雷达成像覆盖范围,并投影到地理坐标系,通过对设计出的结果区域网格化,完成SAR成像区域快速规划。该方法可应用于挂飞试验和地面仿真试验,实现对地面可成像区域的快速分析,提高成像区规划效率。
猜你喜欢
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
通信技术(2019年3期)2019-05-31
学生天地(2019年15期)2019-05-05
电子测试(2018年6期)2018-05-09
传媒评论(2017年8期)2017-11-08
声学与电子工程(2017年1期)2017-06-22
四川师范大学学报(自然科学版)(2015年4期)2015-02-28