
电动汽车无线充电系统中弯道互感优化研究
2024-01-19 08:16骆强胥飞
电测与仪表 2024年1期
骆强,胥飞
(上海电机学院 电气学院,上海 201306)
0 引 言
如今随着各国节能减排的政策号召和化石燃料减少的危机,世界各国都在大力推广使用电动汽车,电动汽车的相关技术研究和开发也得到了专家学者、有关企业及国家的重视[1]。在电动汽车技术研发中,电动汽车的充电方式与续航能力至关重要。首先,传统的插拔式充电存在着充电耗时长、电压不稳定和接触磨损等问题。其次,电动汽车的电池也存在着电能储存不足,循环次数有限等问题。最后,摆脱冗杂的充电电缆的束缚的无线充电技术得到了大量的研究并且发展迅猛,在生活中也逐步得到推广应用[2]。对于非接触式的无线充电技术中,包括系统建模方法、参数配置及优化、频率特性等方面关键技术[3-9],西南交通大学、美国橡树岭国家实验室、中科院电工研究所、日本琦玉大学、麻省理工学院等科研机构均进行了研究。
充电技术研究中,长导轨式能量发射线圈由于具备系统成本低、电能变换装置少等优势而被广泛选用[10]。但是该能量发射方式也存在着功率密度低,侧移适应性弱,尤其在转弯时电压波动较大等问题。针对无线充电时转弯的问题,文中设计了一种圆形补偿线圈在转弯时应用,可以减小能量拾取系统互感的波动,提高电动汽车动态中进行无线充电时电压的稳定。接着,通过仿真的手段进一步优化、验证补偿线圈的设计。最后,通过实验验证了该弯道补偿拾取系统获取电压的稳定性。
1 电动汽车无线供电系统转弯互感分析
1.1 电动汽车无线供电系统转弯过程
以日常生活中常见路段为例,在行驶中大多为90°弯道。由于文中选的是平坦弯道,所以不会产生汽车倾角,从而不考虑汽车倾角给电动汽车的充电效率带来的影响。在不考虑弯道倾角的情况下,设置的平坦弯道选择了四个弯道角度。基于模拟电动汽车行驶过程,汽车内部的拾取线圈与地面发射线圈为研究的主体,关注拾取与发射线圈之间互感耦合面积的变化与电能的变化。在此基础上,简述电动汽车在弯道时,其内部车载拾取系统与发射系统即弯道导轨之间的关系。如图1所示,电动汽车无线供电系统主要分为:能量拾取系统、能量发射系统、信号检测及控制端。
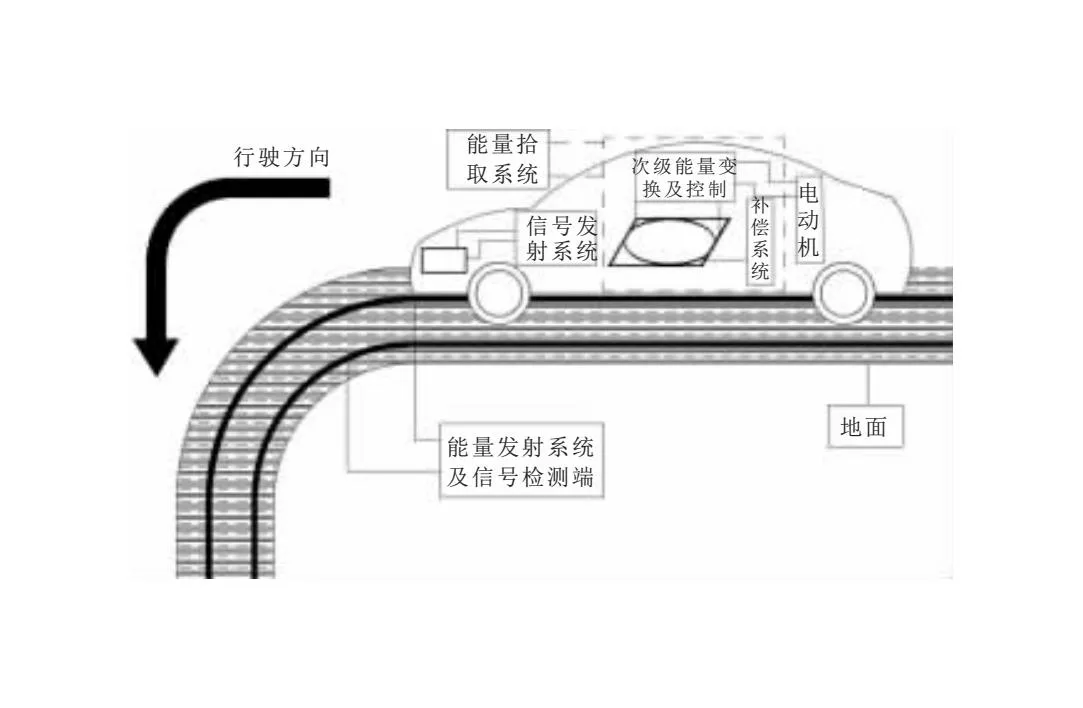
图1 电动汽车行经弯道时系统结构图
首先,电动汽车处于直道时,此时基于感应耦合原理,铺设的发射线圈导轨和车载矩形拾取线圈实现了无线电能传输。接下来,电动汽车内部的能量变换即控制系统,经过一系列整流调控后,将满足运行的能量输入至电动机内,进而匹配汽车所需的运动要求。然后,电动汽车处于弯道时,此时原本运行到直道时地面发射线圈与汽车拾取线圈的互感在行进至弯道时发生了波动。这是由于在直道时汽车拾取线圈与地面发射线圈的正对耦合面积一直是稳定的,而进入弯道时拾取线圈和发射线圈间的正对耦合面积发生了变化,随着弯道的驶入,正对耦合面积逐渐由大到小、再由小到大的变化,进而导致了互感变化,并导致电压、电流的波动。因此,处于弯道时需要设计一个弯道补偿系统以满足稳定电压、电流等电力指标的需求。最后,基于稳定的电力指标的要求,文中设计了弯道信号接收、发射装置,汽车前端也设计了信号控制系统,一旦电动汽车处于弯道时,通过信号调控,便驱使弯道补偿系统进入到工作状态中。
1.2 弯道导轨和拾取线圈的设计
在电动汽车拾取线圈的选型中,大多数研究机构选择的是矩形结构。相关研究表明,矩形线圈[11-12]作为拾取线圈,既可以实现经济上便利和绕制简单的优点,也可以保证拾取系统的效率高、偏移裕量多的特性。因此,将矩形线圈作为拾取系统的主接收线圈[13]。基于拾取线圈的选定,文中将提出弯道导轨的设计。文献[14]指出,发射导轨、拾取线圈在保证拾取效率为80%以上,应当保证发射线圈的宽度要与拾取线圈的宽度近似相等,在长度方面,发射线圈要为拾取线圈的3倍以上,而两线圈间的高度应远远小于两线圈宽度与长度。由于文中所述弯道皆为单车道,因此也应当保证弯道之间的宽度即为两线圈的宽度。基于以上设计分析可得如图2所示的弯道导轨与矩形线圈尺寸设计图。
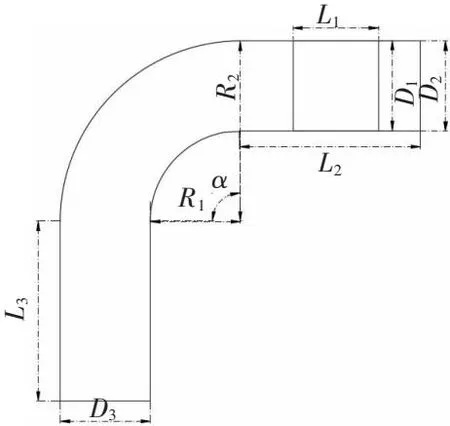
图2 弯道导轨与矩形线圈尺寸设计图
图2中,L1、D1为矩形拾取线圈的长度与宽度,其匝数设为N1。发射导轨线圈在弯道前的直道上长、宽为L2与D2,弯道后的直道长度为L3,宽度为D3,而弯道中,弯道外径为R2,内径为R1,同时内外径为同心圆,弯道角度为α。由于弯道为同一种线圈绕组而成,所以发射导轨匝数为N2。同时,发射导轨线圈与矩形拾取线圈间的耦合距离为h,即为垂直距离。根据上述分析,发射导轨与矩形线圈之间的尺寸关系如下:
(1)
1.3 弯道导轨尺寸与互感波动率关系
基于上节对弯道导轨与矩形拾取线圈的设定,文中将针对互感波动率、弯道内径和宽度之间的比值Q=R1/D2、弯道角度的关系探究。COMSOL Multiphysics软件为多物理场仿真软件,尤其在对电磁耦合方面的建模与仿真的准确性,而被广为应用。文中基于该软件,对无补偿的矩形线圈在弯道时互感波动进行分析。其仿真模型图,如图3所示。
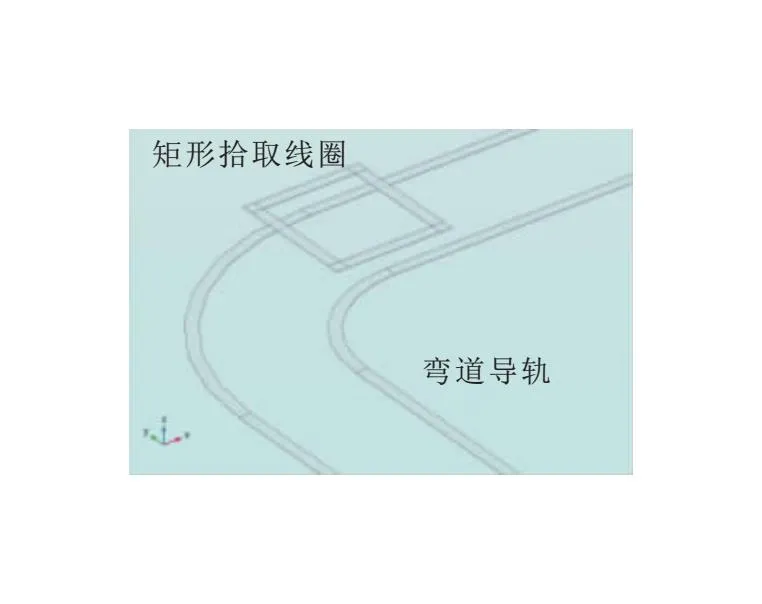
图3 90°弯道无线供电系统仿真图
结合MATLAB软件,经过多次仿真得出比例系数、弯道角度与互感波动率的拟合图,如图4所示。
从图4所示的互感波动率与比例系数Q的拟合关系图中,可以得到两个结论:基于比例系数Q相同的弯道导轨,随着弯道角度的增大,互感波动率也在增大;基于相同的弯道角度,随着比例系数Q的增大,互感波动率在逐渐降低。
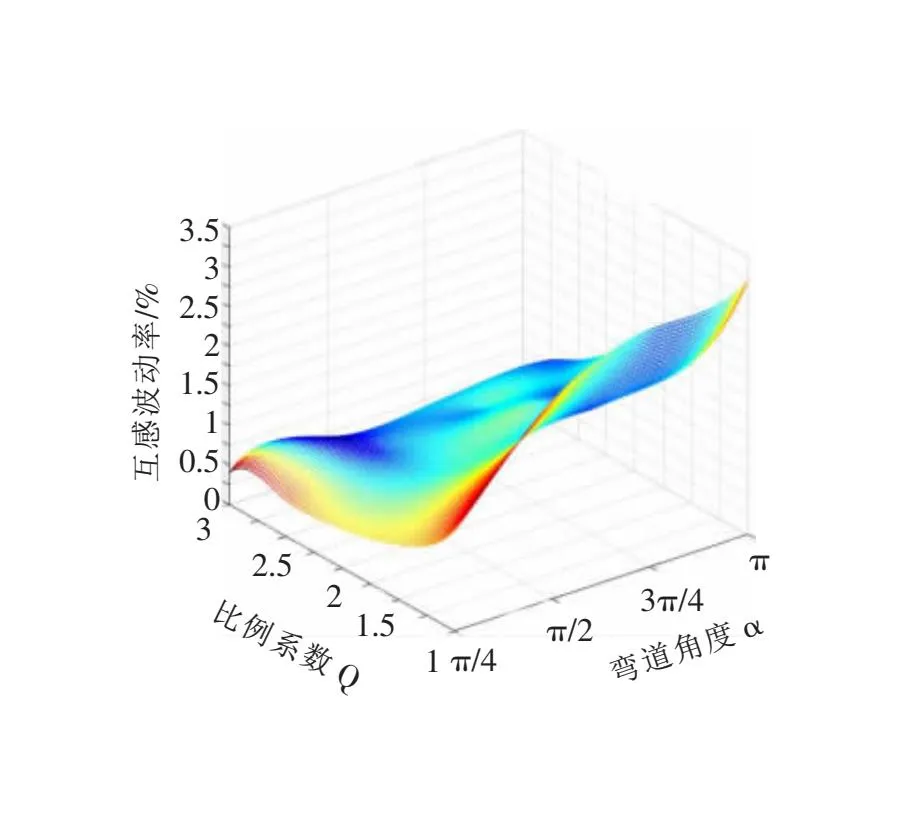
图4 比例系数Q、弯道角度与互感波动率关系图
基于对互感波动的原因分析,在直道时矩形拾取线圈与发射导轨线圈完全正对、重合,耦合面积达到最大,因此互感恒定。而当电动汽车无线供电系统中矩形拾取线圈经过弯道时,弯道处的发射线圈与矩形拾取线圈间无法如直道时完全重合,会有一部分矩形拾取线圈总是无法与发射导轨线圈耦合,因此会产生互感波动。进一步分析表明,当比例系数Q=3时,各角度互感波动率均保持在0.5%左右,这对于无线供电系统而言是足够稳定的。在实际应用中,出于降低施工成本或减小土地占用面积等方面考虑,比例系数Q的范围一般在1~2范围内,此时各角度的互感波动率已经相对而言较大了,远远超过了互感波动率优化标准0.5%,如当比例系数Q=1时,基于尺寸参数设置,将相关参数设置到COMSOL中可得出四种弯道角度的互感波动率为1.37%、 2.62%、 3.15%、 3.47%,其互感波动率曲线图如图5所示。
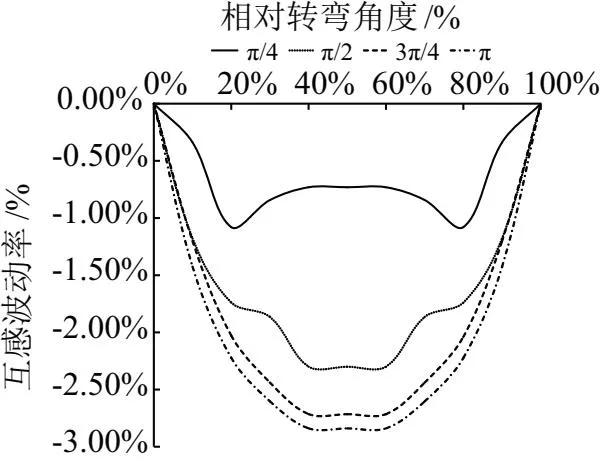
图5 四种弯道角度下比例系数Q=1的互感波动率图
由图5可知,矩形拾取线圈在四种弯道导轨上的互感波动率已经达到了相当大的波动。因此,基于保持无线供电系统稳定性,对多角度弯道导轨进行补偿显得十分重要。接下来文中将以日常生活中较常见的比例系数Q=1的弯道,分析如何通过补偿方法实现无线供电系统稳定性要求。
2 弯道补偿拾取系统模型的构建和主要参数设计方法
2.1 补偿线圈的选择
基于上一节的叙述,矩形拾取线圈在四种弯道角度下的互感波动较大,因此,将对补偿线圈的选择以达到降低互感波动的目的。在无线供电系统中主要的补偿线圈有矩形、圆形、六边形线圈。文中采用的耦合线圈是基于弯道使用的,在文献[15]指出对于三种补偿线圈,圆形在弯道时有着较好的优势,不仅可以保证互感的平稳,而且对于耦合系数及抗偏移能力上在三种线圈中都有着最好的表现。
为对比三种补偿线圈的特性,文中使用COMSOL软件进行互感仿真验证,以选取在弯道中互感波动最低的线圈。首先,文中选取了相同匝数和面积的矩形、正六边形、圆形线圈作为补偿线圈,将其置于主拾取线圈上,同时设置了相同的物理环境与弯道及比例系数为1的导轨。基于以上仿真设置,结合MATLAB软件得出三种线圈在相同角度弯道导轨转弯下互感波动率变化曲线图,如图6所示。
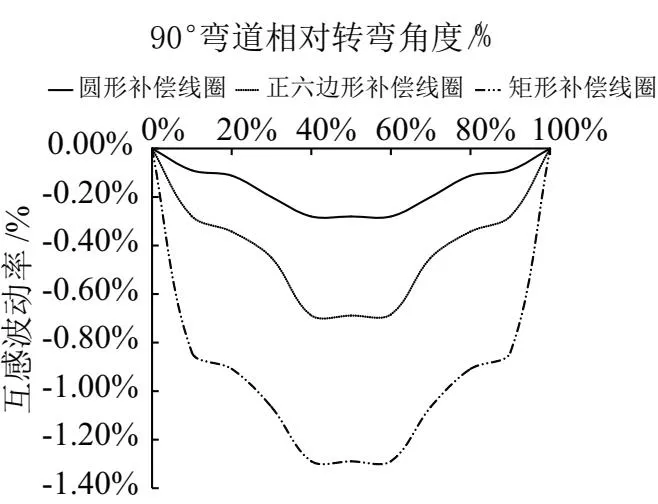
图6 不同补偿线圈在弯道上的互感值波动
由图6可知,在主线圈为矩形拾取线圈下,加入的三种补偿线圈均起到了降低互感波动的效果,这表明补偿线圈是有必要的且也是有效果的。同时,通过三种线圈的补偿效果可知,圆形线圈相比较于正六边形与矩形线圈的互感波动是最低的,这是由于圆形补偿线圈与发射线圈的互感耦合面积较小,并且进入弯道时,圆形补偿线圈的嵌入位置完全处于发射线圈中,不会造成补偿效果波动剧烈的情况。
基于以上分析,从互感波动的基础上进一步仿真可知,在设置了相同的仿真匝数和弯道角度下,圆形的补偿效果在弯道中一直要优于矩形、正六边形线圈。因此,基于互感波动、抗偏移能力、耦合系数等方面考虑,文中选择了圆形线圈作为补偿线圈。结合以上论述,文中后面的弯道补偿拾取系统为主拾取线圈为矩形,内嵌入一个圆形线圈作为补偿线圈。在实际工程实践中,将补偿线圈置于矩形拾取线圈上方,当电动汽车欲驶入弯道时,原先置于上方的内嵌补偿线圈通过切换线路并入到矩形拾取线圈系统中,使得弯道补偿拾取系统开始工作。
2.2 弯道补偿拾取系统模型的主要参数设计方法
结合图2的能量传输系统尺寸图,在添加前述的圆形补偿线圈后,得到了图7的弯道补偿拾取系统尺寸图。图7中,内嵌入矩形拾取线圈的圆形补偿线圈表示为r1,匝数为N,用于文中接下来的仿真、分析及实物平台的搭建。
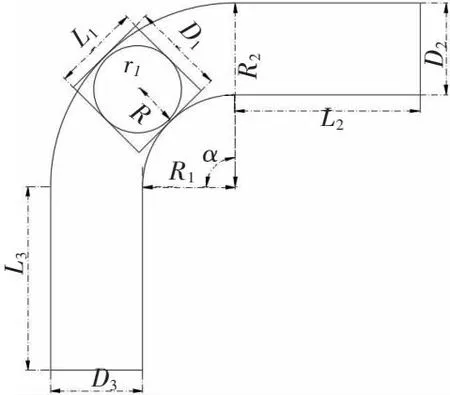
图7 弯道补偿拾取系统传输系统尺寸标识图
如前所述,将圆形补偿线圈的直径设置为2R,且与主接收线圈的宽度相等,即2R=D1,其他尺寸参数与未补偿的传输系统相同。同时,将圆形线圈与矩形线圈之间垂直距离设置为1 cm,在此距离下,文献[14]指出补偿线圈与拾取线圈间的互感比较与发射线圈间的产生的互感相比可以忽略不计。同时,由于拾取线圈与补偿线圈均处于电动汽车内部的拾取系统中,通过同一的电能转化装置,可以将拾取线圈与补偿线圈所获得的电能转化为驱动电动汽车所需要的动力。基于尺寸参数确定的前提下,弯道补偿拾取系统中的补偿线圈的匝数对于维持互感稳定起着决定性作用,因此将探究如何取得合适的匝数以确保互感波动在优化标准±0.5%的互感波动率范围内。
由Neuman公式及耦合线圈之间的互感求解方法[16],得出了直道处矩形线圈与发射导轨的互感近似值M1,弯道处的互感近似值M2,圆形线圈于弯道处的互感近似值M3:
(2)
(3)
(4)
式中G(L1,L2,D1,D2,h)、H(L1,L2,R1,R2,h,α)、F(R,R1,R2,h,α)为尺寸参数。基于无线供电系统的稳定性要求与文献[16]中指出线圈间总互感可以简化为相互叠加的原理,因此系统内部的车载线圈与发射导轨之间的互感应为相等的关系,可以得出:M1=M2+M3。经过数学推导,可以得出系统稳定性的最优匝数比ζ0为:
(5)
互感(M1、M2、M3)由无线供电系统的实际需要选择,进而可以得出三个互感值[17]。从以上的互感公式中可以得出,最优匝数在主拾取线圈已知的情况下,通过最优匝数比便可得出圆形补偿线圈的匝数N。
3 基于遗传算法优化及COMSOL仿真验证
3.1 遗传算法优化
基于互感近似值的求解,文中选用了遗传算法以求得各角度弯道导轨下弯道补偿拾取系统中最优匝数比ζ0。遗传算法是依照以孟德尔的遗传学说和达尔文的自然选择为基础的算法,文中基于文献[14]的基本参数设置,通过弯道角度与最优补偿匝数比ζ0的问题进行了研究。其优化目标函数如下:
(6)
文中使用的目标函数的约束条件为弯道角度α,其范围为0≤α≤π。基于MATLAB软件,文中编写了遗传算法,相关设置为:种群规模为1 000,交叉概率为0.92,变异概率为0.1,最大进化代数为500。文中通过不断迭代的最优化匝数比与弯道角度的关系,经过了434次迭代后,目标函数趋于稳定。在此基础上,文中通过遗传算法优化的目标趋势结合弯道角度的动态变化,得出了趋势图,如图8所示。
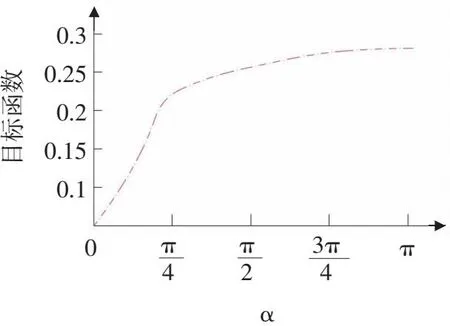
图8 目标函数与弯道角度趋势图
图8表明,随着弯道角度的增大,目标函数即最优匝数比也在逐渐增大,但同时增大的趋势开始降低,趋于平缓。文中结合常见的弯道角度:45°、90°、135°、180°,经过计算得出四种弯道角度的最优匝数N整数解近似值分别为:8、9、10、11匝。将其带入互感公式中,经过MATLAB的处理,得出常见弯道角度补偿最优匝数的互感波动率图,如图9所示。

图9 常见弯道角度的最优化补偿匝数互感波动率图
根据图9所示,四种弯道角度的最优补偿匝数的互感波动率均保持在±0.5%范围内,证明了基于遗传算法优化的最优补偿匝数比是可行的和有效的。为了进一步探究最优匝数下无线供电系统的互感波动率,文中接下来将使用COMSOL仿真软件进行仿真验证。
3.2 COMSOL仿真模型搭建与验证
基于遗传算法优化的最优补偿匝数,文中使用了电磁仿真软件进行验证,四种弯道角度对应的最优补偿匝数能否保持互感波动率在±0.5%范围内。首先,基于第2节中尺寸参数关系,文中搭建了如表1所示的无线供电系统主要参数尺寸表,且在仿真及实验中,设Q=1,h=20 cm。
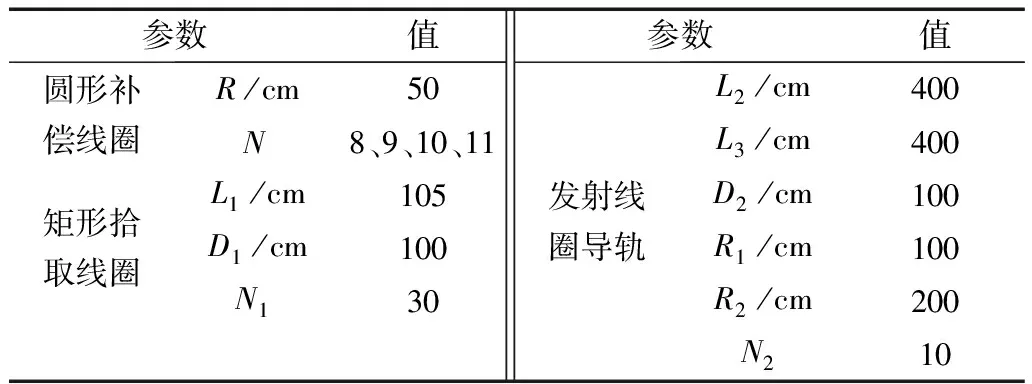
表1 无线供电系统主要参数尺寸表
结合以上参数,对COMSOL仿真软件进行相关设置,对最优补偿匝数的优化,对四种角度弯道仿真了四组匝数为:8、9、10、11。通过以上设置,得出图10所示的互感波动率趋势图。
由图10可知,弯道补偿拾取系统在四种弯道角度导轨下,互感波动率相比于图5的未补偿的矩形拾取线圈已经大幅度降低了,表明了该设计的仿真可行性,也说明了弯道补偿拾取系统对于任意角度弯道都有着保持互感波动稳定的效果。进一步分析表明,在图10(b)、图10(c)中可以得出,90°弯道的补偿线圈匝数为9匝、10匝时,补偿效果是不同的。其中,9匝时的补偿效果是部分欠补偿状态,而10匝时补偿效果为部分过补偿,这表明了在计算补偿匝数时,补偿系统的理论推导出的最优补偿匝数存在非整数的情况。同时,经过对比可知,通过遗传算法优化的最优补偿匝数与经过仿真实验的匝数基本一致,表明了遗传算法对最优匝数比及最优补偿匝数的优化的准确性。
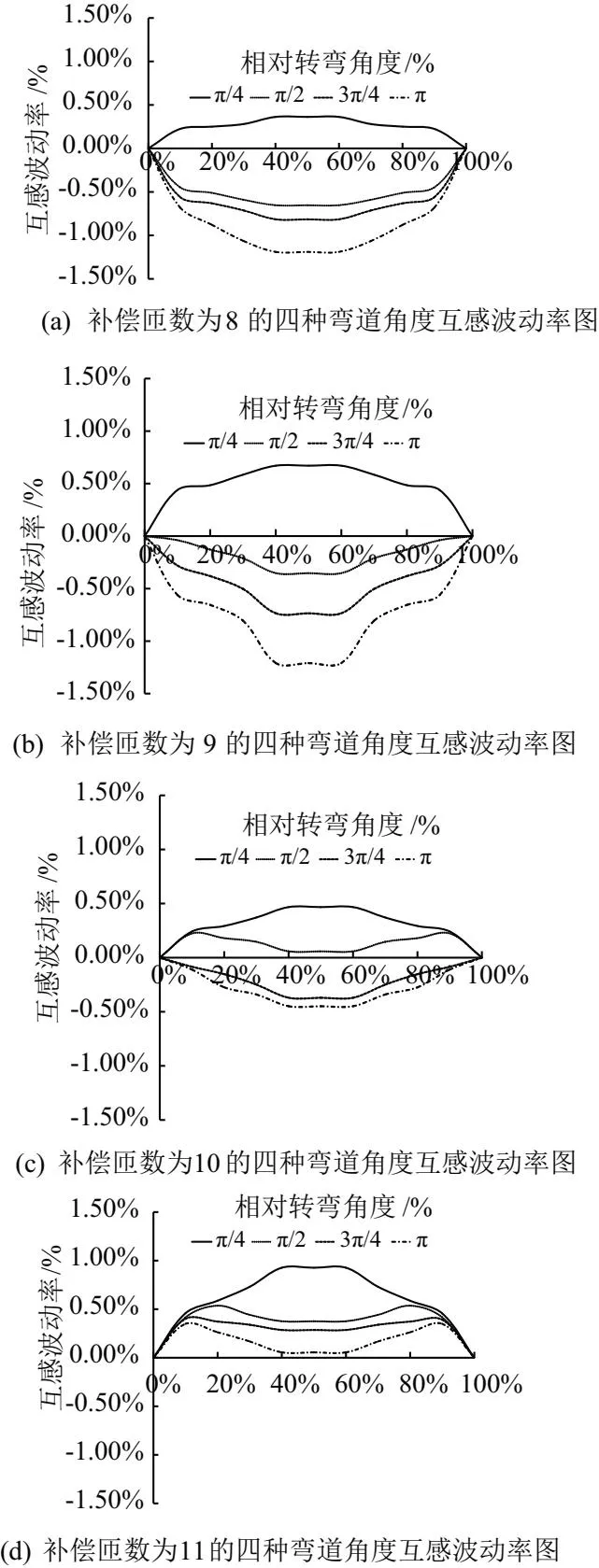
图10 弯道补偿拾取系统匝数互感波动率图
在实际工程的应用中,我们只能选择一个固定的匝数,并用于各种弯道的补偿。根据上述对比,文中选择了以N=10匝最为统一最优补偿匝数,此时四种弯道角度导轨下互感波动率绝对值分别为:0.46%、0.28%、0.27%、0.44%,从而实现拾取系统在转弯时互感的平稳。
经过上述论述,文中采取了遗传算法优化与仿真验证,都表明了文中设计的弯道补偿拾取系统可以实现降低互感波动的目的。进一步研究表明,在统一最优补偿匝数N=10下,通过四种弯道角度导轨的弯道补偿拾取系统,互感波动率均在±0.5%范围内,验证了该设计的科学性与有效性。
3.3 统一规格下弯道补偿拾取系统对电能传输效率的仿真
基于上节的论述,文中选择最优匝数比ζ0=N/N1=10/30=0.3,即10匝作为统一的补偿线圈匝数,并将表1参数设置使用到COMSOL软件中,图11为统一补偿匝数下未补偿的磁通密度与磁通强度分布图。
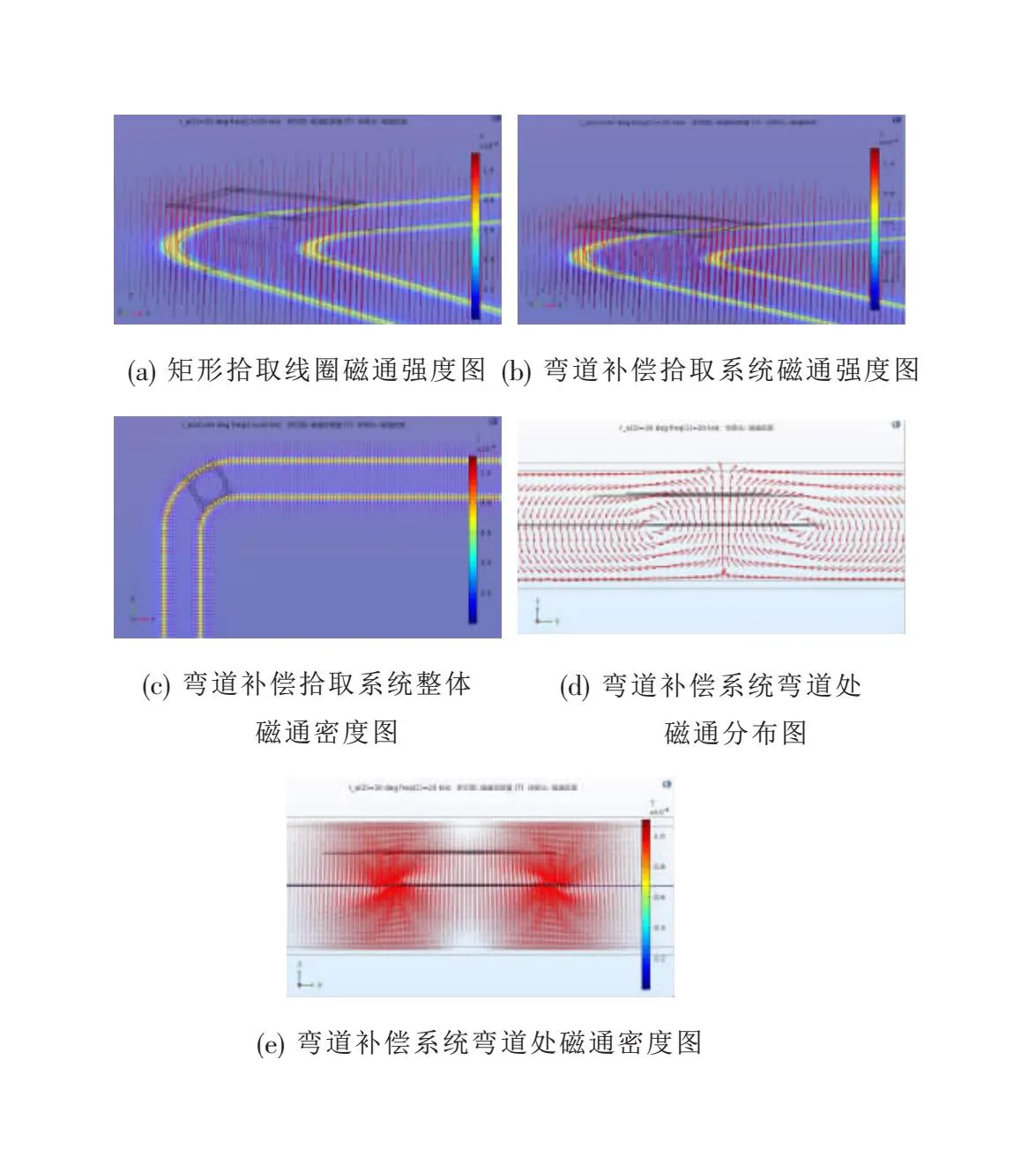
图11 90°弯道电能发射线圈磁通强度与磁通密度图
图11(a)、图11(b)表明,弯道补偿拾取系统相较于未补偿的磁通强度有着明显的提高,起到了增强互感的作用。同时,由图11(c)可知,弯道补偿拾取系统的整体磁通强度分布均衡,表明了弯道补偿拾取系统与整个发射导轨的互感稳定且波动很小。由图11(d)、图11(e)表明,弯道补偿拾取系统在弯道处的磁通密度呈现了较为密集的情况,也证实了弯道补偿拾取系统的设计达到了在弯道处补偿的效果。因此,通过以上仿真、算法验证了该设计的有效性与可行性。
3.4 电动汽车高度与无线充电效率关系仿真
基于上述参数设定,文中对电动汽车高度与无线充电效率进行了仿真探究。通过对弯道补偿拾取系统的气隙高度多次调整,结合COMSOL、MATLAB平台得出了充电效率与气隙高度、弯道角度的拟合图,如图12所示。

图12 四种弯道角度下的充电效率与高度拟合图
由图12可知,当电动汽车处于20 cm处,充电效率最高。由于高度太低,拾取线圈与发射线圈之间存在电磁扰动,从而导致效率较低。同时,图12中表明当汽车高度高于20 cm时,随着高度的增加,充电效率在逐渐降低。因此,文中选择的20 cm的高度既符合了充电效率的高要求,也满足了汽车工程设计。
3.5 实验平台的搭建与验证
在无线充电系统中,能量拾取线圈感应产生的开路电压Voc与线圈之间的互感M存在如下的关系[18]:
(7)
式(7)中,能量拾取系统获取磁通密度为B;IP为能量发射线圈电流;ω为系统工作角频率;S为设计机构的有效耦合面积。根据式(7)知,基于其他条件已知情况下,互感M与能量拾取系统可拾取电压存在正相关关系,稳定的互感对于电动汽车的能量拾取系统中的电压稳定十分关键。因此,文中基于COMSOL的仿真设置,将发射线圈接入电流,将拾取系统中补偿和拾取线圈接入同一输出电能的设备,进而表现互感与电压之间关系。
基于统一规格下各参数的设定,文中搭建了一套工作频率为20 kHz的系统实验平台,由逆变电路、整流电路、SPP补偿机构、电磁耦合机构、圆形补偿线圈及负载等组成,其结构参数为:输出功率3 kW,输入电压为交流380 V,逆变采用三相桥式逆变电路,用120°导通横向换流方式控制[19]。整流采用了三相工频整流电路,功率二级管为560V/52A,型号为SPW52N50C3。基于以上设置,文中将实验数据进行整理,如表2所示。
表2表明了在20 cm处,无线充电的效率、互感、电压均达到了理想的效果,从而证明了经过仿真、算法优化后的实验平台装置达到了预期的优化目标。弯道补偿拾取系统模型实物图见图13(a)。弯道补偿拾取系统接收到的电压波动如图13(b)所示。图中电压波动范围在16 V左右,相较于稳压情况下的220 V,弯道补偿系统的电压为204 V,电压波动率为3.6%;仿真互感波动率由图10(c)可知为0.28%,保持了电压与互感的平稳性,达到了优化标准,验证了可行性。
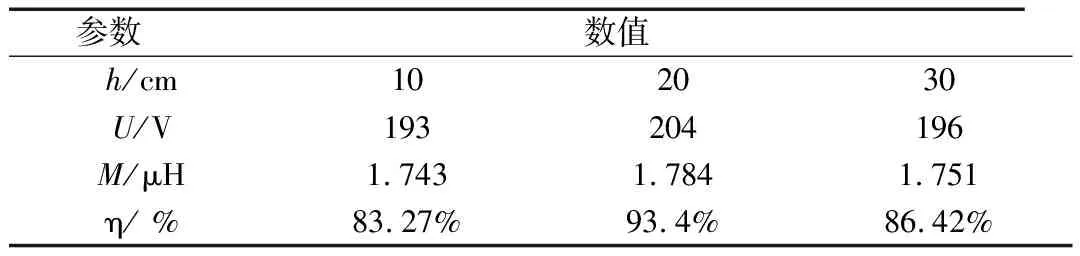
表2 基于20 kHz的实验测量数据

图13 实验平台与能量拾取电压波形图
4 结束语
文中以具有弯道的长导轨式电动汽车连续供电过程中,弯道处存在着互感波动和拾取端电压下降的问题作为研究对象。首先,文中设定了弯道内径与宽度的比值为比例系数Q,当Q=1~2时,通过仿真分析可知,电动汽车在转弯时存在着较大的互感下降的问题。同时,也得出了比例系数Q=3以上时,任意弯道角度的互感波动率保持为±0.5%,达到了优化的标准。其次,文中基于实际出发,研究了比例系数Q=1的互感波动情况,研究表明此时电动汽车处于弯道时互感波动较大。因此,文中选择了比例系数Q=1的弯道设置比例时作为研究互感波动率、弯道角度之间的对象,并选择了补偿线圈,设计了弯道补偿模型。文中设计的弯道补偿拾取系统模型,通过理论结合算法计算出最优化补偿匝数N,经过仿真的验证,证实最优化补偿的匝数实现了优化的标准,保持任意弯道角度下,互感波动率均在±0.5%内。最后,通过仿真、实物的验证了在统一规格下,解决降低了互感与拾取电压波动较大的问题,达到了优化的效果。
猜你喜欢
电机与控制应用(2022年7期)2022-08-31
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
电力系统自动化(2021年18期)2021-09-25
湖南电力(2021年2期)2021-05-08
福建质量管理(2020年12期)2020-07-02
汽车与驾驶维修(维修版)(2019年4期)2019-09-10
中国特种设备安全(2019年7期)2019-09-10
新能源科技(2018年10期)2018-02-15
中学物理·高中(2016年12期)2017-04-22
制造技术与机床(2015年10期)2015-04-09
