海洋自主无人系统跨域通信组网技术发展
2024-01-26 03:18徐同乐肖玉杰毛柳伟乔永杰
指挥与控制学报 2023年6期
徐同乐 肖玉杰 何 翼 王 慎 刘 方 毛柳伟 乔永杰
随着无线传感网络、智能与自适应控制理论、微型传感与通信设备等技术的推陈出新和无人自主装备的创新发展,无人系统集群化、自主化已逐渐成为未来海战的新模式和新趋势.海上跨域无人集群是指将无人机(unmanned aerial vehicle,UAV)、无人艇(unmanned surface vessels,USV)、无人潜航器(unmanned underwater vehicle,UUV)具有显著功能差异的异构无人系统,通过空中、水面、水下等不同作战域之间的协同控制,实现集群化作战[1].作为跨域无人集群实现互连互通的基础,跨域通信组网技术早已成为保障无人集群指挥协同、载荷控制以及其他数据信息实现联网互通的关键环节[2],其技术水平直接影响整体作战效能的发挥.国内外对于无人系统通信组网技术的重视程度日益提升,相继开展了很多基于UAV 集群、USV 集群、UUV 集群的组网技术研究,见文献[2-6].文献[7]基于UAV 集群飞行自组网(flying Ad-Hoc networks,FANET)归纳梳理了多址接入协议、路由协议的应用特点,并针对性提出了下阶段重点研究方向,进一步丰富了无人集群通信组网的技术方案.但上述研究仅局限于单一作战域,对于横跨多作战域的跨介质通信研究相对较少,值得深入挖掘.
在众多公开科研项目和学术成果中,可看到美、英、法等国对无人系统跨域协同领域的高度关注和技术革新.早在2005 年,美国海军空间与海战系统司令部(Space and Naval Warfare Systems Command,SPAWAR)中心基于UAV、USV、地面无人系统开展了面向“入侵人员”监控与打击的一系列跨域协作演示;2015 年,多国主导的美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)跨域海上监视和瞄准项目中,围绕搭建跨域体系结构进行目标监视瞄准和敌对力量拒止,构建了反应迅速、覆盖面广的无人作战能力[8];2017 年,多国主导的OCEAN2020 项目中,开展了一系列无人/有人装备的指挥协同和相互配合试验,进一步检验了采集信息和整合数据的正确性[9].
国内外无人系统跨域组网领域的研究多是在数据建链及传输[10]、编队控制[11]、任务规划[12]等方面,具体组网技术的实现多是利用多种异构通信手段和中继节点进行跨域连通,并在2016—2022 年间美国海军举办的“先进技术演习(advanced naval technology exercise,ANTX)”上均有所论证[13].文献[14-16]基于遂跳矢量转发(vector-based forwarding,VBF)协议以及改进型协议相继完成了水下-空中的节点数据传输研究,但该类协议节点数量过多,没有合理利用分簇特性进行系统简化,同时VBF 协议没有充分利用空中网络性能优势,来弥补水下通信时延过长的自然缺陷.现阶段,国内外常用的分簇算法(如LEACH、LIC)均忽略了簇首的选择对各节点完成转发任务性能的影响差异.
本文从集群跨域通信组网的概述和内涵入手,围绕跨域自组网关键技术,综述了集群跨域组网技术发展概况,并就海上跨域无人集群应用特点逐一分析了优缺点,提出了针对不同应用场景的无人集群跨域组网最优设计方式,并梳理了后续研究展望,以期为我国海上无人集群跨域组网建设和发展提供一定的理论支撑.
1 集群跨域通信组网概述
1.1 集群通信组网概念及内涵
无人集群实现通信主要依靠无线自组网(如“Ad-Hoc”),目前国内学者对于集群通信组网尚未形成成熟完备、高度统一的认识[6].集群通信组网可依据应用领域不同,将其划分为指挥控制组网、平台决策组网、导航基准组网等,通过查阅近年来集群通信领域文献资料和研究成果,对集群通信组网概念及内涵的相关描述进行了梳理归纳,如表1 所示.
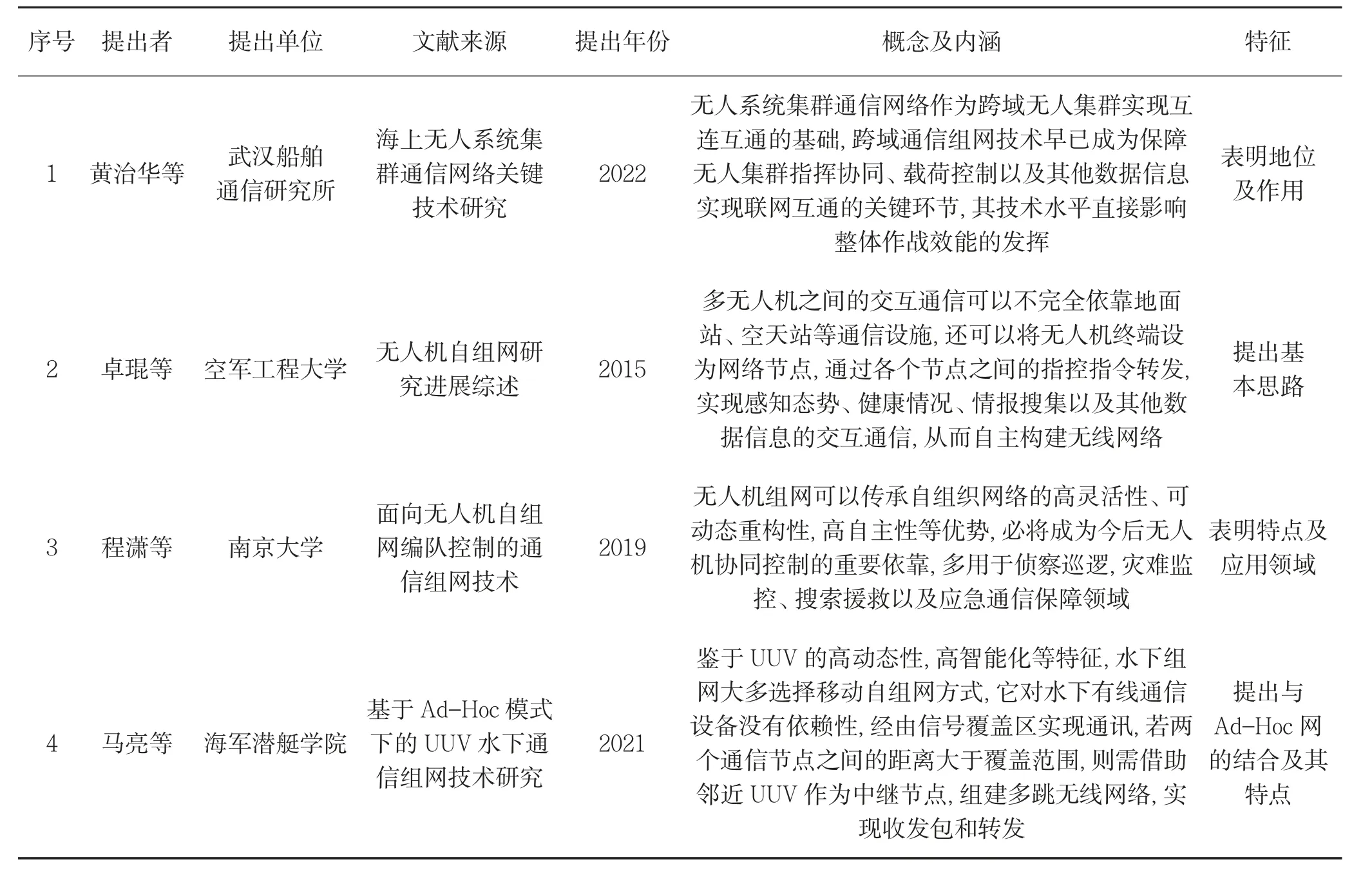
表1 典型关于集群通信组网相关概念及内涵的描述Table 1 Typical description of related concepts and connotations of cluster communication networking
国内对于集群通信组网的原理研究主要集中于空中、水面或水下的同构作战域,而对基于横跨多作战域的跨域组网研究较少.本文通过综合文献资料,对集群跨域通信组网提出如下概念:集群跨域通信组网是指跨域集群各终端间在Ad-hoc 网络、无线传感网络、无线Mesh 网络的基础上,利用无线自组网特性结合空中、水面、水下等作战域之间的复杂环境特征,实现指挥信息、任务载荷、平台控制等数据信息的连同入网及应用.
1.2 无线自组网的特性
无线自组网中各网络节点兼具发送和接收功能,可充分利用多跳特性实现网络组建.主要具备如下特性[17]:
1)独立性.Ad-Hoc 网络中的各节点能够通过路由协议和分簇算法(又称分布式算法)独立、自主地完成通信网络的组建.
2)动态性.节点可因环境变化获得移动性,致使拓扑结构和链路有效性随着节点运动动态变化,从而实现动态拓扑,进一步强化无线自组网的动态适应性.
3)对等性.为保证网络在不同情况下的运行安全,Ad-Hoc 网络可以通过分簇算法进行网络划分,实现“去中心化”组网.“去中心化”是指各网络节点具有同等权限和地位,具有“平等化、开源化、扁平化”的网络结构.
4)多跳性.当节点部署完成后,可能存在部分节点没有被对方通信覆盖的现象,源节点将按照路由协议以多跳形式向通信范围外的目的节点传输数据.网络多跳是指各节点兼具发包、收包等功能,相互之间均可实现直接通信、转发.
通信组网的拓扑结构、分簇算法(分布式算法)、路由协议作为无线自组网充分发挥自身特点的关键技术,是其有效进行通信连通的关键因素.
2 集群跨域组网拓扑结构概况
2.1 无线自组网拓扑结构简介
无线自组网拓扑结构主要包括平面结构、单频分级结构、多频分级结构[18],下面依次扼要介绍结构特点:
1)平面结构.平面结构,如图1 所示,又称对等式结构,是最为普遍的拓扑结构,其中,每个节点均兼具发送和接收功能,还能实现转发.它的全局节点对等结构,使得网络对于节点运动性更强的动态网络有更好的适应性.这种全局节点对等结构使得数据信息传输负载较大,网络能耗激增,会使生命周期缩短.
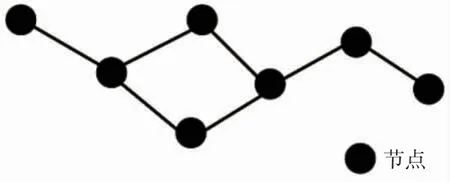
图1 平面结构示意图Fig.1 Schematic diagram of planar structure
2)单频分级结构.在单频分级结构中,如图2 所示,网关节点采用相同频率实施组网,簇首与网关节点构成骨干网络.单频分级结构可以在一定程度上规避节点扰动.多跳路由策略可以在不增加带宽消耗的前提下提高系统吞吐量.但若分簇算法不考虑簇首节点的轮换机制或负载均衡,将使一些充当簇首角色的节点提前消耗能量,使拓扑结构遭到破坏.

图2 单频分级结构示意图Fig.2 Single frequency hierarchical structure map
3)多频分级结构.在多频分级结构中,如图3 所示,网络进一步被划分为多层级或簇,属于同一层级或者簇的节点之间采用同一通信频率,在不同的层级或者簇的节点之间又采用不同通信频率.高层级节点可访问不同级别,使节点通信可以采用多种频率来实现,进而完成数据发送与转发.多频分级结构能进一步减少节点扰动,提高传输效率,但要占用更多频宽资源,不适合频宽资源短缺的网络系统.
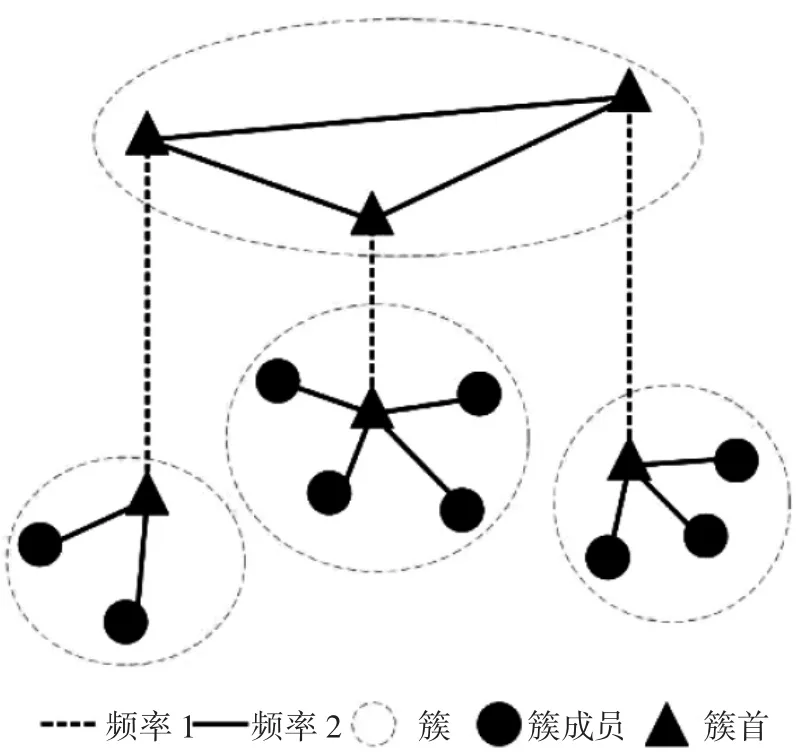
图3 多频分级结构示意图Fig.3 Multi-frequency hierarchical structure map
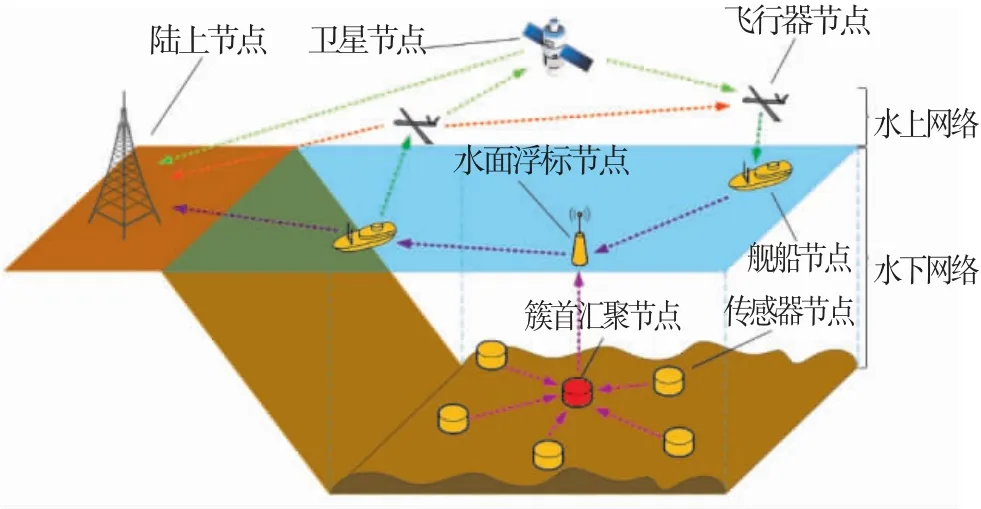
图4 静态二维海空网络结构示意图Fig.4 Schematic diagram of static 2-D sea and air network structure
2.2 海空网络拓扑结构特点
海空环境下,其网络拓扑结构与陆上网络相比,最大差异在于由介质特点造成的水下网络,水下网络通信方式主要有电磁波通信、光通信、量子通信以及水声通信,前三者相对于水声通信均有一定劣势,如表2 所示,因此,水声通信日益成为水下通信的主导技术[18].但水声通信中节点能量不便补给,且在设备性能受限的情况下,节点通信距离、传输效率均落后于水上传输.海空网络拓扑结构可划分为静态二维海空网络拓扑结构,静态三维海空网络拓扑结构以及动态三维海空网络拓扑结构3 种[19].
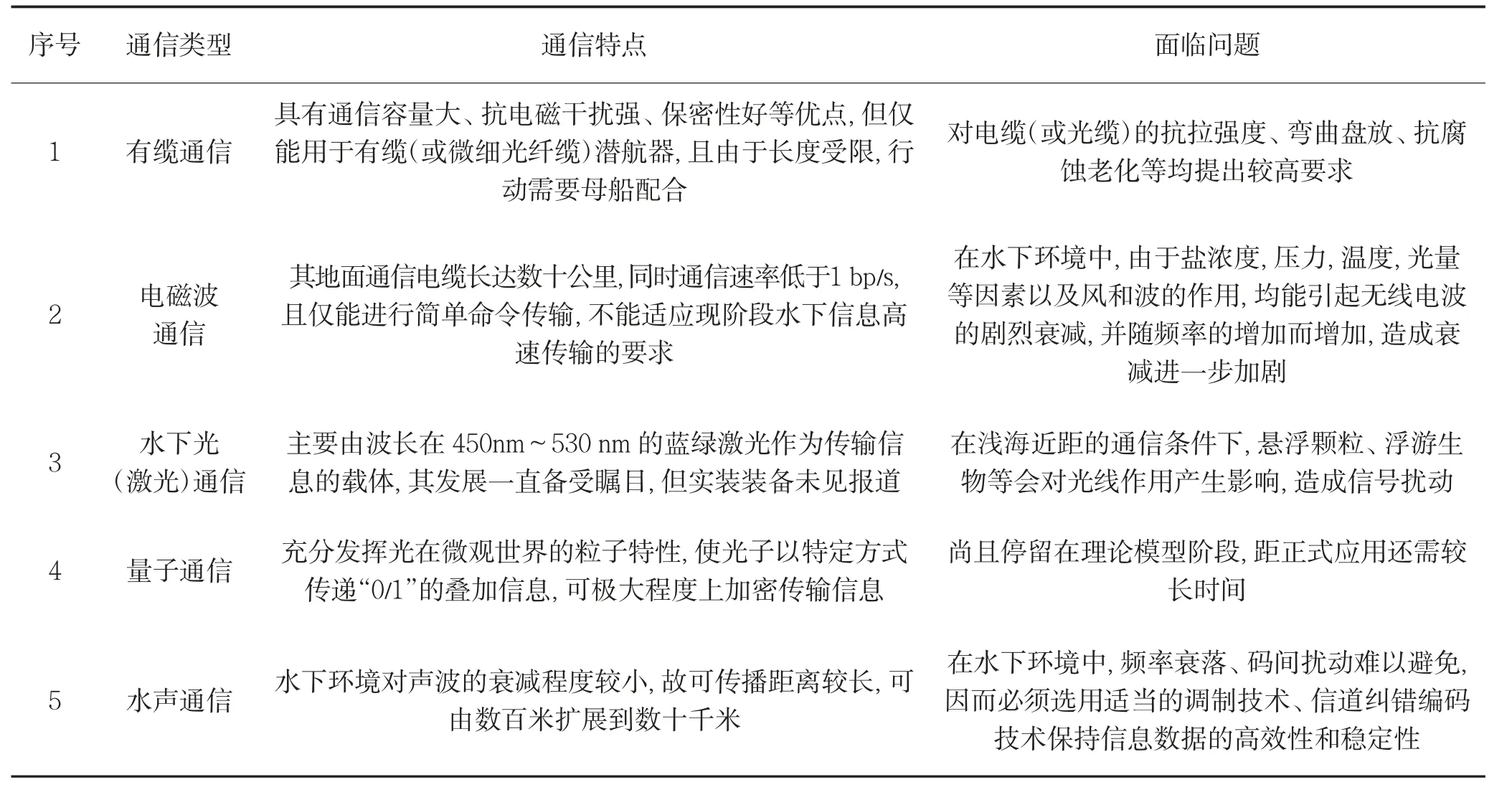
表2 水下网络通信主要方式特点分析Table 2 Analysis of main mode and characteristics of underwater network communication
2.2.1 静态二维海空网络
该网络中的网关节点固定于同一平面,同时传感器节点使用缆绳固定于同一海洋深度平面或直接固定于海底.在这种情况下,网关节点一般不被赋予动态性,故较多应用于长时间监测任务,如反潜、反水雷等.静态二维海空网络的拓扑结构布放方便,结构稳定性强,所应用的算法与协议更容易实现,效率更高,但适用范围一般只限于长时间低动态的任务环境,并且检测范围受限.
2.2.2 静态三维海空网络
该网络中各水下节点具备不同的深度范围,并且可以在水下环境立体分布,如图5 所示.其中,网关节点主要通过海底缆线或浮标悬挂等方式进行节点布放.由于节点采用立体分布,因此,能够采集到整个区域内的海洋数据,常用于多层次、大面积的数据采集任务环境,比如海战场勘察等,在一定程度上填补了二维静态海空网络的不足.另外由于采用动态路由机制,该系统具有更好的稳定性,可靠性与可扩展性,同时降低了通信能耗.但在节点布防上,需从多个方面综合考虑汇聚节点的设计,造成布防难度和费用的增加.
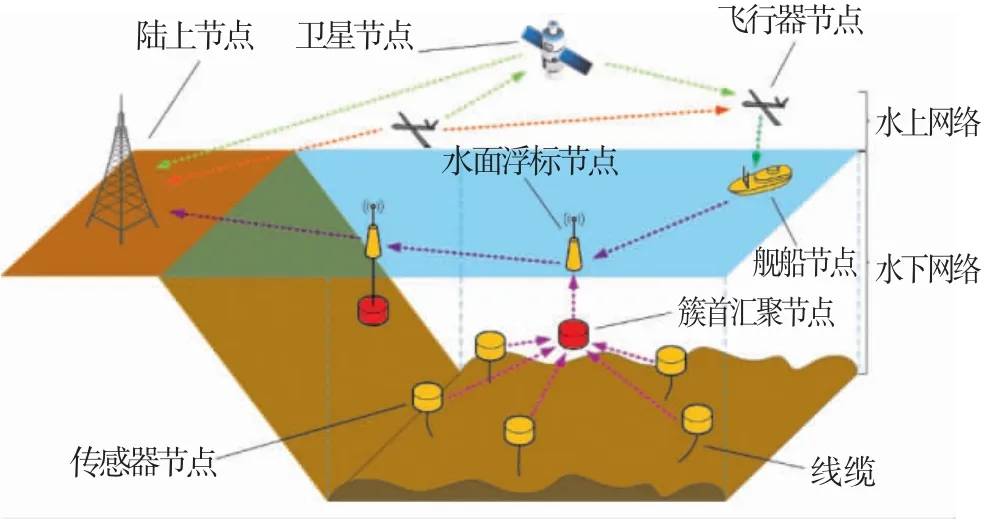
图5 静态三维海空网络结构示意图Fig.5 Schematic diagram of static 3-D sea and air network
2.2.3 动态三维海空网络
该网络主要通过新增水下移动网关的方式使水下网络更加适应动态任务的需要,如图6 所示.动态三维海空网络能够有效提高网络对动态任务需求的适应能力,跨域无人集群遂行作战行动即可采用这种拓扑结构.但其需要节点具有更高性能,一般用于高成本海空网络中.

图6 动态三维海空网络结构示意图Fig.6 Schematic diagram of dynamic 3-D sea and air network structure
3 集群跨域组网分簇算法概况
过于繁杂的拓扑结构将导致节点之间数据传输发生碰撞或冲突,造成全网数据传输效率和吞吐量的骤减,而过于简单稀疏将会减少可行链路数量,造成孤立节点或者割裂网络的出现,致使网络稳定性降低.为解决这类问题,引入前文提到的分簇算法来优化拓扑结构.分簇算法又称为层次型拓扑控制算法,其主要概念和理论由BAKER 等在1981 年提出,主要内容是通过选举簇首、簇成员对网络等级进行划分,使簇首成为汇聚和转发的主要节点[20].分簇算法的最大优点在于能够使得网络冗余降低,有助于增强网络功耗,实现负载均衡控制,从而提高网络寿命,自提出以来一直成为无线自组网领域的研究热点.本文简要介绍几种常见的分簇算法,并逐一分析其特点,如表3 所示[21-25].
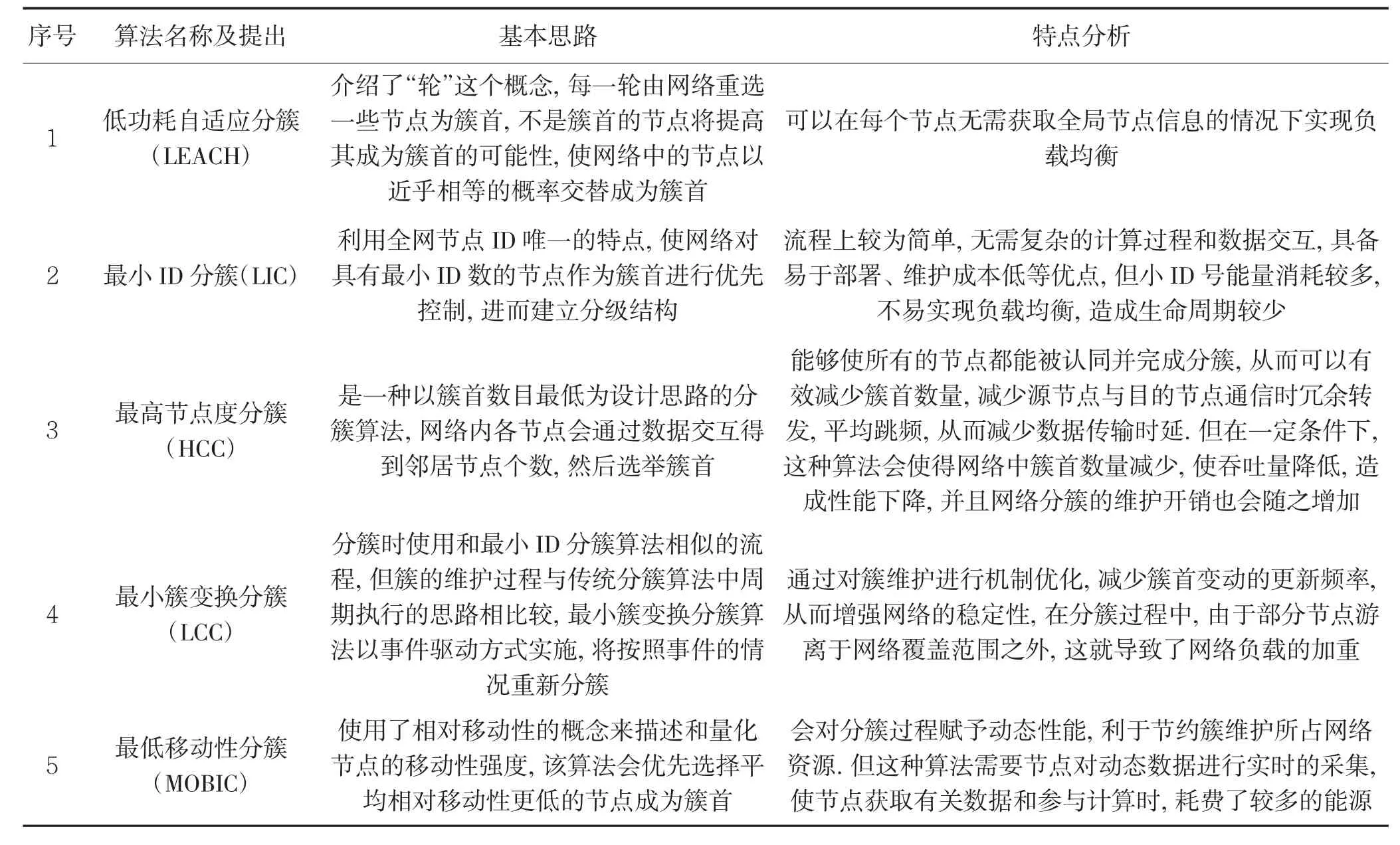
表3 常见的分簇算法及其特点分析Table 3 Common clustering algorithm and analysis of its characteristics
海洋自主无人集群所属环境横跨水上水下,势必要重点考量水下网络性能的受限性、可靠性,因此,无需全局信息、具有较低计算开销特性的LEACH 分簇算法适用性相对较高.
4 集群跨域组网路由协议概况
本文简要介绍几种常见类型的路由协议,并逐一分析其特点,如表4 所示.
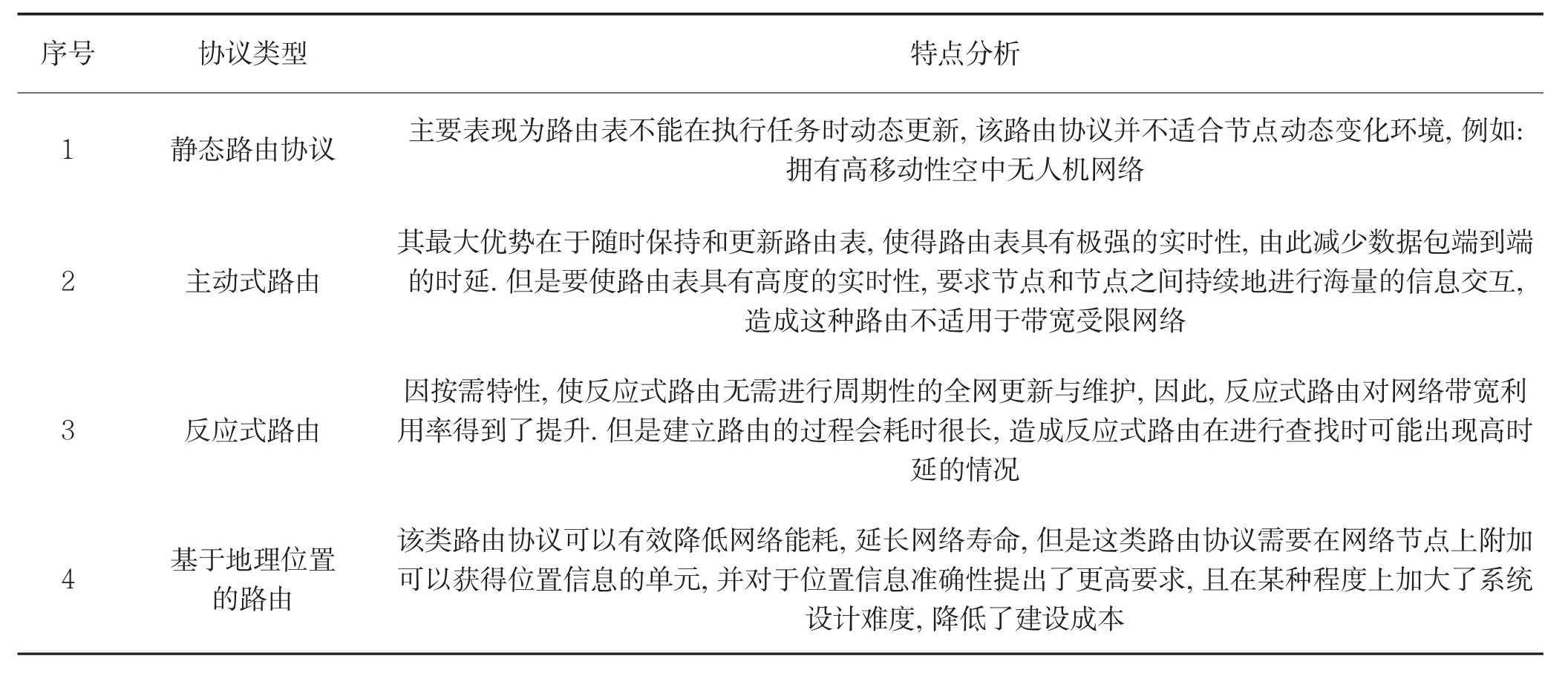
表4 常见的路由协议及其特点分析Table 4 Common routing protocols and analysis of their characteristics
通过对不同种类路由协议优缺点和实用性的研究分析,主动式与反应式路由协议通常被应用在具有良好性能的水上网络,而基于地理位置路由通常被应用在性能不佳的水下网络.
5 集群跨域组网关键技术分析
5.1 跨域传输技术
跨域无人集群由于需横跨多类通信域,对其跨域连通和数据传输提出了更高要求.常见的跨域传输技术主要有: 1)动态频谱感知与接入技术.主要通过人工智能算法,确定频谱资源接入方法,实现空闲资源的寻找和连接,例如基于支持向量机的频谱感知算法、基于卷积神经网络的频谱感知算法[26].2)多模态自主链路接入技术.主要是引入强化学习技术,动态选取最佳接入方法,实现自适应接入.3)大规模集群仿生智能组网技术.主要是结合仿生技术,使其在个体感知和行为的基础上涌现集体仿生行为,如鸟群、狼群等[27],实现“自组织”组网.
5.2 安全防护技术
无人集群所面临的电磁环境更为恶劣,要求通信网络具有低截获概率、抗欺骗能力、高安全性以及足够的抗干扰能力.常见的安全防护技术主要有:1)无线网络轻量级认证技术[28].可以针对宽带受限的复杂战场环境,通过轻量级认证协议实现安全认证,防止非法接入.2)无人集群分布式密钥管理技术[29].可以针对实战场景中,人员动态调整、密钥易遗失的需求,采用基于证书、身份ID 的等密钥管理方法,如基于Blom 算法设计的密钥分配方案采用组内和组间双空间密钥管理机制,可以最大程度减少计算,提高效率.
5.3 自主智能化技术
无人系统相比有人系统的显著特点是无人化、智能化,与其相应的通信网络也应具备自主化、智能化能力.常见的无人运行管理技术主要是面向任务流程的网络建模技术.主要是通过深入分析任务背景需求,采用基于图论的结构模型进行网络建模,针对带宽、时延、抖动需求以及无人平台间的信息交互关系,快速设计生成网络结构.
5.4 通信抗干扰技术
无人系统集群化后,由于平台数量增多,致使相互之间通信扰动增强,因此,需要大力推进通信抗干扰技术,常用通信抗干扰技术主要有扩频、功率控制、间断传输、多用户检测等技术.近年来兴起了一些新技术,诸如多输入多输出技术,该技术在数据发射端、接收端均部署多根天线,通过增大信道容量,使其适应更大范围的数据速率变化.此外,结合正交频分复用((orthogonal frequency division multiplexing,OFDM))等技术可实现时域、频域、空域多维抗干扰.
6 集群跨域组网发展趋势分析
6.1 探究多通信手段以实现功能互补
在今后的海上联合作战中,无人系统支持下的联合战术跨域协同,见图7,必然要和天基、岸基、空中、水面、水下多类型有人/无人平台合作,实施预警探测、态势共享、火力打击,以及其他各种作战任务需要经常和其他节点进行通信连接,同时兼顾体积,功耗等因素,在布局和其他要素的情况下,集成水声和光学、电磁和其他各种通信手段,实现与其他作战平台/作战系统之间的有效信息通联.

图7 跨域无人集群联合作战概念图Fig.7 Joint operations concept diagram of across-domain unmanned clusters
6.2 改善现有技术以提高传输速率
增强分簇算法对网络移动的适应性.传统分簇算法如LEACH 等,这是一种以“轮”概念为基础的周期维护分簇算法,但现实无人集群系统移动性过强,部分节点常常移动到通信覆盖范围之外,造成节点失去簇首.以下研究中,要求分簇算法能够使簇首维护和更新机制得到改善,从而提高对网路节点高移动性的适应能力.
提高链路时延估计的准确性.现阶段路由协议主要是根据距离和节点通信范围,通过链路预估时延算法进行跳数预估,从而进行选择和决策,但实际链路会造成实际距离与相对距离存在偏差.以下研究中,要求分簇算法引入较多参数进行链路时延预估,以此来提高精度,确保网络在选择低时延链路时能够做到更科学、准确.
6.3 推行模块化、小型化,以实现标准化、通用化发展
相较于有人平台,无人装备小巧轻便,搭载能力受限,且大多采用电池供电,要求通信模块必须能够保证性能要求,即减小模块体积,降低功耗,提高可完成任务的时间.现有各类型无人装备种类多样,生产厂家繁多,外形、尺寸、载荷能力均有较大差异,所以现阶段不同平台的通信载荷共用性较差.以跨域无人集群联合作战为例,每一个无人平台都必然会按照不同的平台规格,逐渐走向规范化和标准化,因此,通信模块还应朝着标准化、通用化的方向发展,以提高通信载荷适装性与可维护性.
7 结论
海上跨域无人集群正在呈现出智能化、自主化的发展趋势,从作战运用的角度来看,集群跨域组网技术的更新迭代,对进一步深化贯穿各作战域的无人作战新质能力,全面构建无人系统战术跨域协同作战体系有着极为关键的推动作用.介绍了国内外无人集群跨域组网领域研究成果和发展概况,围绕跨域自组网技术从拓扑结构、分簇算法、路由协议3 个方面,阐述了集群跨域组网技术发展概况,并就海上跨域无人集群应用特点逐一分析了优缺点,选取了较为适用的集群跨域组网设计方式.从探究多通信手段、改善现有技术、推行标准化发展等方面提出了后续研究展望,以期为我国海上无人集群跨域组网建设和发展提供一定的理论支撑.
猜你喜欢
系统仿真技术(2022年4期)2023-01-17
北京航空航天大学学报(2022年8期)2022-08-31
读报参考(2022年1期)2022-04-25
科学家(2021年24期)2021-04-25
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
网络安全和信息化(2018年3期)2018-11-07
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
电测与仪表(2014年16期)2014-04-22