基于变增益最速梯度下降法的表贴式永磁同步电机位置修正策略
2024-02-21 09:42王益明张雪锋高龙将徐奇伟罗凌雁
电工技术学报 2024年3期
王益明 张雪锋 高龙将 徐奇伟 罗凌雁
基于变增益最速梯度下降法的表贴式永磁同步电机位置修正策略
王益明 张雪锋 高龙将 徐奇伟 罗凌雁
(输变电装备技术全国重点实验室(重庆大学) 重庆 400044)
滑模观测器具有响应速度快、鲁棒性强等优点,已广泛应用于表贴式永磁同步电机无位置传感器的中、高速控制系统。然而,具有固定参数的滑模观测器很难在宽速度范围内保持一致的估算精度,而采用基于速度观测器带宽限制的方法进行噪声和扰动抑制会降低电机的动态性能。针对上述问题,该文首先分析滑模观测器估算表贴式永磁同步电机转子位置的误差产生机理,提出一种新型位置误差观测器,主要思想是基于磁链观测进行位置误差连续估算,并采用最速梯度下降法对积分过程进行反馈校正;然后,通过变增益循环迭代优化提高位置误差观测器的速度与准确性;最后搭建表贴式永磁同步电机加载测试平台进行实验,结果验证了所提方法具有位置观测精度高、鲁棒性强的特点。
表贴式永磁同步电机 变增益最速梯度下降法 滑模观测器 估算位置修正策略
0 引言
表贴式永磁同步电机(Surface mounted Permanent Magnet Synchronous Motor, SPMSM)具有高效率、高功率密度、宽调速范围等优点,广泛应用于电动汽车、航空航天、伺服驱动等领域。在进行SPMSM磁场定向控制时需要转子位置信息。传统方法通过在电机轴端部安装旋转变压器、光电编码器等传感器进行位置测量,但是位置传感器会导致系统成本的增加和可靠性的降低。因此,SPMSM的无位置传感器控制技术研究具有重要意义[1-3]。PMSM无位置传感器控制技术可以分为两类:一类是高频信号注入法,通过注入高频信号并提取高频响应获取转子位置,适用于零速、低速,如脉振高频注入、正弦高频注入等[4-5];另一类是基于电机数学模型的方法,通过提取反电动势进行转子位置估算,适用于中高转速,如扩展卡尔曼滤波法、滑模观测器(Sliding Mode Observer, SMO)法、模型参考自适应法、非线性观测器法等。其中,滑模观测器法由于具有算法简单、动态响应快、鲁棒性强等优点,得到了广泛应用[6-7]。但采用滑模观测器进行转子位置估算时,由于测量噪声和信号相位延迟等导致估算的转子位置存在偏差,该位置偏差会使得系统动态和静态性能下降[8]。针对上述问题,学者们进行了深入研究,提出的解决方法可以分为两类:一类侧重于提高反电动势观测器的性能;另一类是优化位置与速度的估算方法。
在提高反电动势观测器性能的研究中,文献[9]提出了一种在线参数自适应的离散时间SMO,根据负载转矩和转速自适应地调节饱和函数的边界和观测器增益,实现对扩展反电动势的准确观测。文献[10]提出了一种自适应同步频率观测器,能够在频率变动时自适应地跟踪定子电流,通过定子电流误差收敛保证观测器输出的反电动势平滑。文献[11]将扩展反电势估算值反馈到定子电流观测中,同时采用消除旋转影响的锁相环(Phase Locked Loop, PLL)改善滑模观测器的抖振问题。文献[12]采用串联高阶滑模结构保证输出反电动势的连续光滑,以此削弱SMO中高频切换带来的抖振。这些方法通常需要调整多个参数来设计自适应方案,实际工程应用中调试过程较为复杂。
在优化位置与速度观测方法的研究中,文献[13]通过建立SMO的非线性等效模型来分析和补偿SMO引起的位置估计偏差,并采用前馈锁相环来抑制变速操作下的稳态位置跟踪误差。文献[14]提出通过建立独立位置和速度误差观测器来消除负载干扰的影响,该方法降低了速度和负载转矩瞬变时的位置估计误差。上述两种方法都需要额外的速度观测器,使控制系统变得复杂。此外,在暂态过程中,位置和速度观测器很难同时保证快速收敛。文献[15]提出采用三阶非线性观测器代替正交锁相环,采用非线性反馈机制提高收敛速度,然而该方法需要准确的系统惯性参数,否则会出现明显的位置估算误差。文献[16]提出一种双重锁相环,通过对延迟重构信号与初始估算位置进行二次锁相以补偿位置误差。文献[17]以最小电流为优化目标,调整锁相基准调节补偿角度,这两种方法实现简单且对参数依赖较小,但是在稳态时存在电流抖振。
针对以上方法的局限性,本文首先对环路滤波器、锁相环跟踪滞后等非理想因素所造成的转子位置估算误差进行分析,研究转子位置估算误差补偿方法,建立估算坐标系下SPMSM数学模型;然后提出基于最速梯度下降法的位置误差观测器,并利用变增益循环迭代方法提高观测器的收敛速度与准确性;最后基于一台SPMSM进行实验研究,验证本文所提策略的正确性和有效性。
1 SPMSM滑模观测器及转子位置估算误差分析
1.1 滑模观测器原理
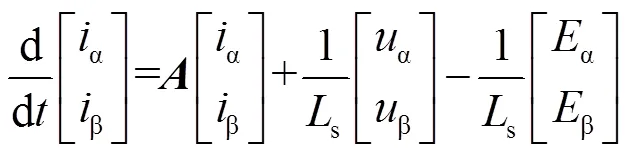
PMSM在α-β坐标系下的电压方程用反电动势形式可表示为

式中,α、β,α、β分别为α、β轴定子电压和电流;s为定子电阻;d、q分别为d、q轴电感,在SPMSM中d=q,后文中二者均用s表示;e为电机的电角速度;为微分算子;α和β为反电动势,可表示为

式中,e为转子的电角度;f为永磁体磁链。
由于反电动势中包含转子位置信息e,因此可通过反电动势进行转子位置估算。以电流作为状态变量设计滑模观测器,根据电压方程(1)得到状态方程(3)。
式中,为转移矩阵,有

基于状态方程(3),设计滑模观测器表达式为

式中,上标ˆ表示估算值;为滑模控制律增益;sgn为符号函数。通过式(3)和式(5),获得电流误差方程为
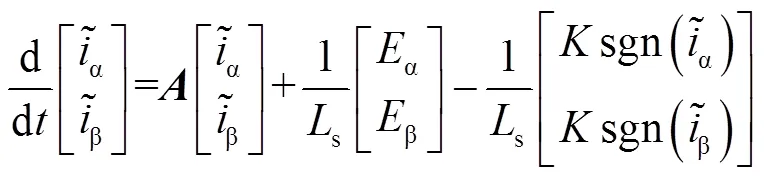
当观测器的状态变量到达滑模面后,观测器状态将在滑模面附近保持平衡稳定运行。在稳定的滑动模态下,估算反电势的表达式为

为减小高频抖振现象对估算位置带来的影响,采用锁相环(PLL)提取转子位置。PLL的结构框图如图1所示。
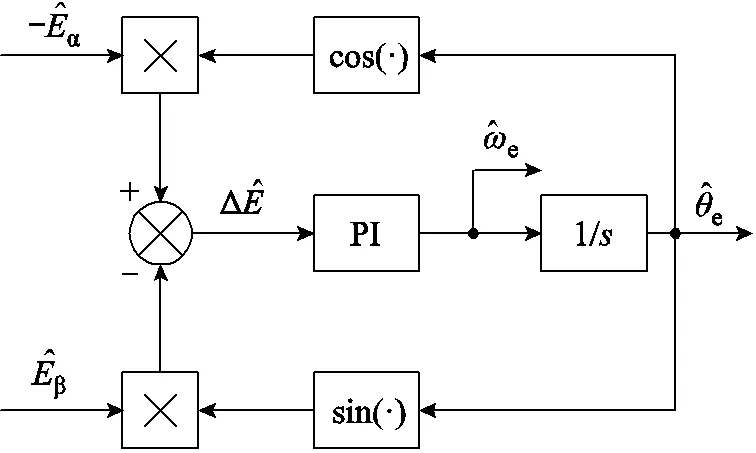
图1 锁相环结构框图
PLL的表达式为

1.2 估算位置误差分析
在基于滑模观测器的SPMSM闭环调速系统中,一些非理想因素如低通滤波器引起的相位滞后、环路延迟和锁相环跟踪延迟会影响位置估算精度。以下分别对其进行详细分析。
1)低通滤波带来的相位滞后
滑模观测器估算的反电动势有较大的开关噪声,需要设置低通滤波器进行处理;通过锁相环得到的转速估算值,也需要进行低通滤波。上述滤波器的使用,均会带来估算转速与估算位置的误差,虽然能够对其进行相位补偿,但系统变化时很难计算精确的补偿值,这种影响在电机高速运行时尤为明显。
2)环路延迟
在数字控制系统中,需要在一个周期内完成电流采样、滑模观测器及矢量控制运算,并更新下一周期的脉宽调制(Pulse Width Modulation, PWM)输出占空比,其处理时序如图2所示。

图2 数字采样、运算及更新PWM时序
图2中,信号采样与控制指令存在时序限制要求,本周期的控制指令需要在下一周期执行并进行采样。在该过程中,控制信号在印制电路板线路和电气隔离芯片上传输时存在的信号延迟、功率器件存在的开通关断过程、电流采样时传感器上升下降时间、采样信号低通滤波相位延迟等都会造成控制环路的延迟。由于控制环路的复杂性,难以实时准确计算出环路延迟造成的位置估算误差。在高速运行时,载波比较低,环路延迟将进一步增大位置估算误差。
3)锁相环跟踪过程
由于锁相环的PI调节器具有低通滤波属性,导致电机在动态运行过程中会产生时滞效应,如图3所示。因此在动态运行过程中会产生不可避免的估算转速跟踪及收敛过程,这会导致估算转子位置偏差增大。
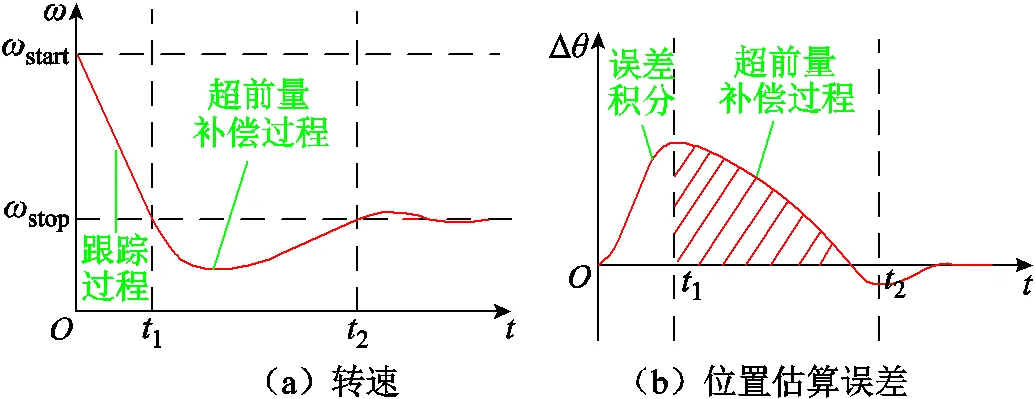
图3 锁相环跟踪过程
2 基于最速梯度下降法位置误差观测器
2.1 估算坐标系下的数学模型


图4 实际位置与估算位置空间关系

式中,γ、δ分别为估算坐标系下的γ轴和δ轴电压。
位置误差err在电机稳态运行时保持不变,因此err为常值,即
结合式(9)与式(10),得到γ-δ坐标系下SPMSM的电压方程为
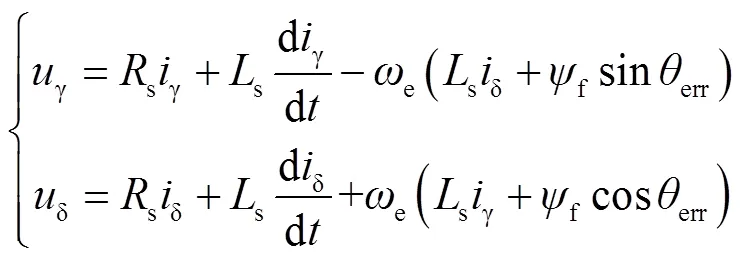
式中,γ、δ分别为估算坐标系下γ轴和δ轴电流。
2.2 基于最速梯度下降法的位置误差观测器
为能够准确观测到角度误差并提高位置修正过程对电机参数变化的鲁棒性,本文提出基于磁链观测器进行位置误差连续估算,并采用最速梯度下降法对积分过程进行反馈校正。基于γ-δ轴电压方程(11),定义新的状态变量和输入变量分别为
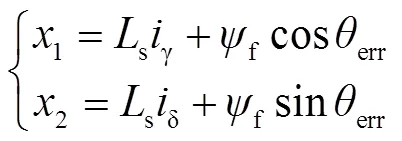
式中,、为定义的状态变量,代表γ-δ轴下的电机磁链,该状态变量包含位置估算误差;、为定义的输入变量。
猜你喜欢
防爆电机(2020年6期)2020-12-14
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
电子测试(2018年14期)2018-09-26
电测与仪表(2017年24期)2017-12-19
光学精密工程(2016年3期)2016-11-07
电测与仪表(2015年9期)2015-04-09
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
电子设计工程(2014年18期)2014-02-27