电力系统受迫振荡检测与自适应振荡抑制研究
2024-02-21 09:36李清彭光强何东林熊林云
电测与仪表 2024年2期
李清,彭光强,何东林,熊林云
(1.中国南方电网有限责任公司超高压输电公司检修试验中心,广州 510663;2.重庆大学 电气工程学院,重庆400044)
0 引 言
随着电网负荷的持续增长,长距离输电线路在电网中的作用逐渐凸显出来, 因其具有较高电能传输效率以及较强载荷能力[1]。然而,当电网发生跨区域低频振荡时,长距离输电线路的布署会在一定程度上影响电网的稳定性[2]。
针对电力系统跨区域振荡,目前已提出电力系统稳定器(PSS),应用于柔性直流输电系统中的功率振荡阻尼器(POD)以及安装分布式本地控制器等多种控制策略用于发电侧以及负荷侧的振荡抑制[3]。然而,近期有报道发现,在跨区域振荡被抑制的情况下,在具有长距离输电线路的电力系统中仍然存在高幅功率振荡[4]。这种现象被定义为受迫振荡,其产生于多个干扰功率频带对电网主频的频繁扰动,而跨区域振荡模态也包含在这些干扰功率频带中。多个干扰频率之间的耦合会造成较强的谐振现象,因而会使得电力系统失去稳定性。针对此种振荡现象,文献[4]提出可以通过切断干扰源的方法降低系统受迫干扰幅值、改善系统主导模态阻尼比以减小系统受迫振荡幅度。然而,由于发电机机械控制系统响应速度远慢于系统扰动变化,因而难以及时切除外界干扰。另外,由于实际电网中存在各种优化运行的发电功率、功率调度约束,所以现有的通过调节发电机有功/无功功率以改变系统主导特征值的虚部的方法在实际大规模电力系统中难以实现。但是由于POD通常安装于同步发电机侧,因而可以通过改进POD以抑制不确定电力系统中存在的受迫振荡。此时,系统需要具备可靠的受迫振荡检测能力。
文献[5]提出了低频振荡的模态辨识方法,但由于受迫振荡产生机理完全不同于传统的跨区域低频振荡,因而需要特定的检测方法。文献[6]提出受迫振荡与区域间振荡模态之间具有谐振互动的可能性,并得出受迫振荡源于水电系统中的受迫注入功率的结论。文献[7]提出了一种基于多数据块确定受迫振荡源的方法。文献[8]提出了一种基于剩余谱分析以及支持向量机的方法用于区分受迫振荡与自然振荡,此方法能够较为精确地区分两种振荡方式,即使在两者的振荡频率接近的情况下也能保持较高精确度。
文献[6-8]都只针对受迫振荡问题提出了相应的检测方法,没有提出相应的抑制措施。而文献[9]提出一种基于静止无功补偿器(STATCOM)的受迫振荡抑制策略,其通过一个谐振控制器实现对有功和无功功率的调节进而抑制受迫振荡。然而,此种方法没有考虑受迫振荡检测过程与谐振控制器控制作用之间通信延迟的负面效应,这种延迟效应可能会导致此谐振控制器的控制精确度降低。针对此种延迟效应,文献[10]提出了一种基于事件触发控制的受迫振荡阻尼抑制方法,此方法基于极点配置原理与事件触发通讯原理,其能够在一定程度上减小通讯延迟影响。然而,文献[10]所提方法未考虑受迫振荡与区域间振荡模态之间的交互影响过程,因而其难以有效抑制受迫振荡与区域间振荡。
在此背景下,提出了一种用于受迫振荡的新型检测方法,其通过小信号分析求得系统受迫振荡的解析形式;通过一种混合线性-自适应控制设计过程设计了一种新的POD控制器,进而同时抑制电力系统极限受迫振荡以及区域间振荡;系统性的分析了受迫振荡与跨区域振荡之间的互动过程,进而得出文中控制器的目标函数。
1 POD控制器通用控制架构
电力系统常用POD控制器控制架构如图1所示。
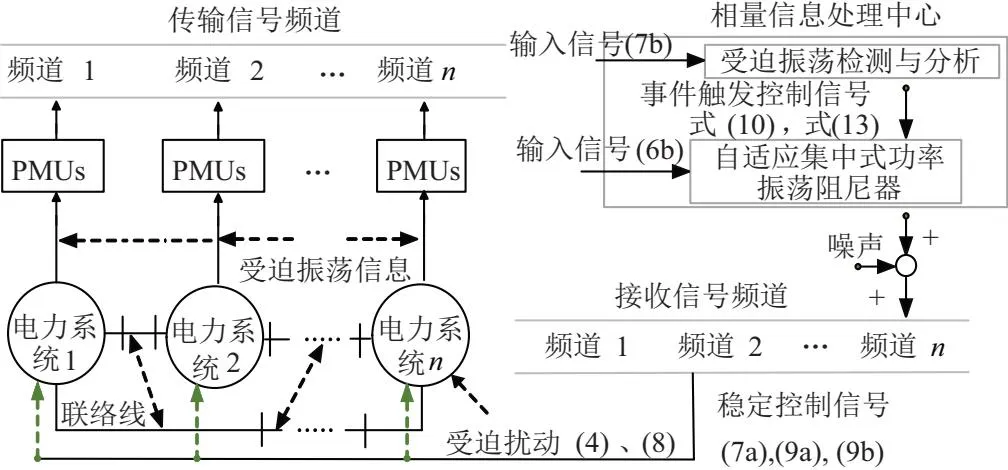
图1 电力系统中常用POD控制器的控制架构
其由n个局部电力系统构成,各个系统之间通过联络线连接, 并在每个区域内安装PMU装置用于测量并收集与受迫振荡有关的信息。在移动时间窗t内,考虑了通讯网络对输入输出信号的影响。此外,在每个控制中心设置相量数据集中器(PDC)用于收集并同步PMU处获取的数据,并用于分析系统受迫振荡的特性。在通信频道中,考虑其对应的延迟函数f1(t)以及不确定数据集fp(t),其描述为:
(1)
(2)
(3)
式中α为缩减因子,且有α1≠…≠αN,而函数shuffle(·)表示对数据序列进行随机变化的操作。为测试文中所提POD控制器在最坏情景下的性能,假设式(3)在集中式POD控制器的输入输出对上同时出现。
此外,在任意同步电机输入端注入受迫扰动量df(t)作为多频段信号输入。在移动时间窗t内,当任意受迫扰动量(df,1(t)∪…∪df,g(t))对系统造成影响时,此扰动量将被检测并传输至控制中心用于分析其受迫扰动模态并启动相应阻尼控制器。其中,扰动量df(t)由式(4)描述[11]:
(4)
式中r代表受迫扰动的工作逻辑,r=0代表同步电机不受此种扰动影响,而r=1代表同步电机1受此种扰动影响;下标1,…,nt为同步电机编号;下标k=1,…,nk代表谐波分量号;nk为总谐波分量数;ω=2πf为振荡角频率,其相角为θ;f为振荡频率;P为受迫振荡幅值;ϑ为df(t)中的白噪声。
2 受迫振荡检测与系统建模
2.1 受迫振荡检测
电力系统小信号稳定性分析模型可通过齐次微分方程描述:
(5)
式中x∈n×1为系统状态变量;z为代数变量;J1-J4为稀疏雅克比矩阵。通过小区系统中的代数变量,式(5)变为:
(6)
式中A为系统状态矩阵。
通常,受迫振荡将以机械或电磁功率扰动的形式周期性施加于发电机转轴上。相应的,电力系统动态方程可描述为:
(7)
式中B为单位矩阵;u(t)∈m×1为受迫扰动向量,且有ul=ΔPlsin(ωl(t))。式(7)中Δx可以求解得出:

(8)
式中Δx1(t)为系统零输入响应;而Δx2(t)为系统零状态响应,即系统受迫振荡模态。
分析Δx2(t)时,考虑状态矩阵地特征值分解A=ΦΛΨ,并带入式(8)中,有:

(9)

(10)
式中φir和ψrl分别为第i个右特征向量以及第j个左特征向量,其具体形式为:
φir=|φir|∠γir,ψrl=|ψrl|∠αrl
(11)
而Δx2(t)的第r个系统模态λr可表示为:
(12)
式中ζr、ωnr、θr分别为阻尼比、无阻尼自然频率以及阻尼角。将式(11)~式(12)代入Δx2(t)中,可得出受迫振荡Δy(t)的解析式为:
(13)
式中Z为受迫振荡幅值;φ为受迫振荡信号Δy(t)与第l个受迫扰动之间的相角差,并有:
(14)
(15)
(16)
(17)
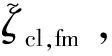
其中ci|φir||ψrl|ΔPl为模态幅值;2ωl/η为受迫振荡与自然振荡之间的幅值比。式(13)~式(17)即为系统中存在的受迫振荡的解析表达式,根据解析式得到受迫振荡检测流程图,如图2所示。其中Kurt是振荡信号的峰度,大多数弱阻尼振荡的峰度在区间(-0.68,0.56),正阻尼谐振峰度通常在区间(-1.29,-0.88),受迫振荡的峰度一般在区间(-1.45,-1.43)之间[12],因此文中λ值取0.7。在实际的电力系统中受迫振荡与自然振荡的幅值比2ωl/η通常是大于1的,因此取σ为1是合适的。

图2 受迫振荡检测流程图
2.2 含受迫振荡电力系统模型
对于图1所示系统,其状态方程为:
(18)
式中X、U和Y分别为系统状态量、输入变量以及输出变量;上标0表示相应矩阵不含不确定项;上标c表示相应矩阵受通讯网络影响;上标c表示系统受到受迫扰动影响;A、B、C分别代表状态矩阵、输入矩阵以及输出矩阵;当考虑系统不确定性、通讯网络以及受迫扰动(4)的影响时,式(18)演化为:
(19)
式中上标(·)′表示包含fl(t)以及fp(t)的系统矩阵。
通过PMU装置,可将式(19)中的稳定信号Uc′(t)以及测量信号Y′(t)改写为离散形式:
(20)

(21)

Uc′(t)=-K(t)Y′(t)=-K(t)Cc′Xc′(t)
(22)
稳定控制器参数矩阵K由两部分构成,即:
K(t)=Ks(t0)±ΓΔKα(t)
(23)
式中Ks(t0)为稳态线性控制器;ΔKα(t)为受迫振荡期间的自适应控制器;Γ为事件触发控制逻辑函数。当系统检测到受迫振荡以后,Γ=1;否则,Γ=0。将式(22)代入式(19),系统闭环状态方程为:
(24)
3 受迫振荡与跨区域模态阻尼控制器
文中所提受迫振荡与跨区域模态阻尼控制器由两部分构成,即线性控制部分以及自适应控制部分。其中,线性控制部分的目的在于保持受迫扰动发生前系统处于稳定域内,而自适应控制器的目的在于调整控制参数以在非线性状态下抑制系统振荡。因此,式(23)所示的控制器参数可描述为:
(25)


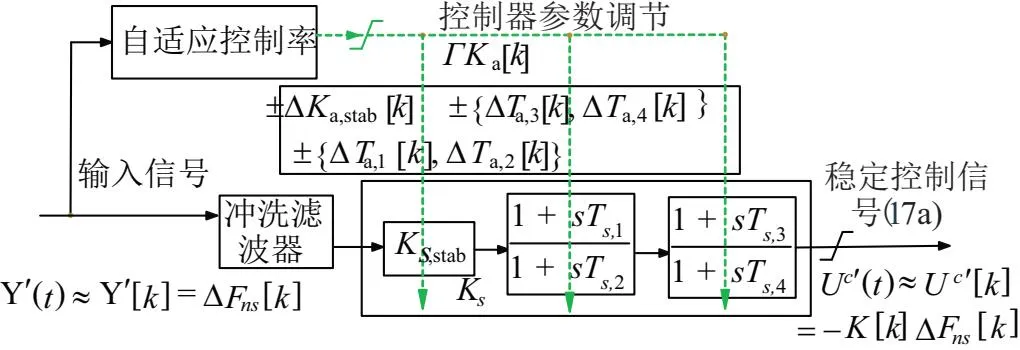
图3 受迫振荡与跨区域振荡控制框图
控制器设计需要实现三个目的,即提高系统阻尼特性,减小振荡模态之间的交互作用,以及提高系统针对外界不确定扰动的鲁棒性。值得注意的是,文中采用本地POD作为集中式POD的后备控制器,本地控制器的详细结构见文献[17]。为抑制受迫振荡以及跨区域振荡模态,文中主要考虑图1以及图3所示集中式POD的控制器设计。为实现对于受迫振荡以及跨区域振荡模态的更好的抑制效果,提出优化模型:
(26)
式中Jdamp为阻尼性能指标;FOR定义为受迫振荡比,其具体形式为:
(27)


(28)
式中Jint为交互因子;max{·}为取最大值函数;Nt为任意两个主导模态之间的距离数。此处max{·}函数作为权重因子的意义在于通过优化幅值较大的振荡模态对应的交互因子以降低高能振荡模态与系统跨区域振荡模态之间的交互作用。

(29)
(30)
将式(29),式(30)展开后有:
(31)
(32)

(33)


为提高系统阻尼特性,减小振荡模态之间的交互作用,并实现高鲁棒性,提出如下含约束优化模型:
(34)
在自适应控制器参数设计中,系统的频率偏差均值将作为重要的参数设计依据[4,6,9]。相应地,式(10)中的自适应项ΔKa(t)将由式(35)决定。
(35)

图4 文中自适应控制流程图
4 仿真验证
4.1 仿真平台与参数选择
为验证文中所提控制方法的有效性,在IEEE 14机系统上进行了仿真验证,本系统基准功率为100 MW,频率为50 Hz,其网络结构如图5所示[11]。
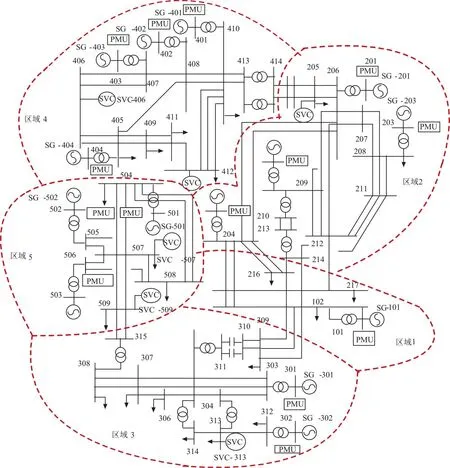
图5 14机系统网络结构
在本平台中,每台同步电机采用2~12个发电机组的多机等值模型。因文中所提控制器作用于本地发电机的自动电压调节器以及自动发电控制系统中,因而无需考虑系统调度中心到本地发电站之间的通讯延迟。此外,系统被分割为5个区域,其中,区域1和区域2处于电气耦合运行模式,因而,系统共含有4个主要区域,3个跨区域模态以10个局部模态。同时,在母线205,313,406,412,507以及509处各安装一个静止无功补偿器用于改善系统的功率传输效率并提高系统稳定性。根据文献[10]、文献[13]和文献[19-20]的结论,ΔFns对于跨区域振荡模态频率范围内的受迫振荡模态具有较高的可观性,因而在文中通过采集ΔFns(t)的信号值用于受迫振荡分析检测,这可以通过在同步电机终端母线处安装PMU装置实现。因此,在区域1~5内安装的PMU数量分别为1,4,2,4,3个。当系统中不存在受迫振荡时,系统中的跨区域振荡模态频率分别为0.281 Hz、0.385 Hz以及0.461 Hz,而其对应的阻尼比分别为1.57%、1.02%以及1.15%。
4.2 小信号稳定分析
首先针对正常运行点进行小信号稳定性分析。通过以下步骤计算跨区域振荡以及受迫振荡的阻尼比:
(2) 通过式(12)计算跨区域振荡与受迫振荡模态特征值。
首先验证所提受迫振荡检测方法的有效性。根据式(12)~式(17)求得系统振荡模态,并与文献[7]所提的基于多数据块法的受迫振荡检测方法进行对比,对比结果如图6所示。

图6 两种受迫振荡检测方法对比

图7 小信号稳定分析中采用的受迫扰动信号

表1 估测模型对比
当模型估计阶次降低时,模型计算时间以及精确度也相应降低;而Hankel矩阵的奇异值则随着模型阶次降低而增加。由于12阶模型的计算时间远高于8阶模型;且8阶模型的精确度明显优于6阶模型。因此,可以采用8阶模型用于系统模态辨识。8阶模型能够反映原始模型的重要特性,并易于实时应用。因而可以通过式(11)以及式(12)辨识出受迫振荡以及跨区域振荡。对于图2所示的控制器K(t),其输入输出信号分别选取为:输入信号为受到受迫扰动影响的同步电机频率偏差均值,受迫扰动具有较强的可观性;而输出信号通过在相应同步电机自动电压调节器场电压处注入信号UC′(t)=-K(t)ΔFns(t)实现。
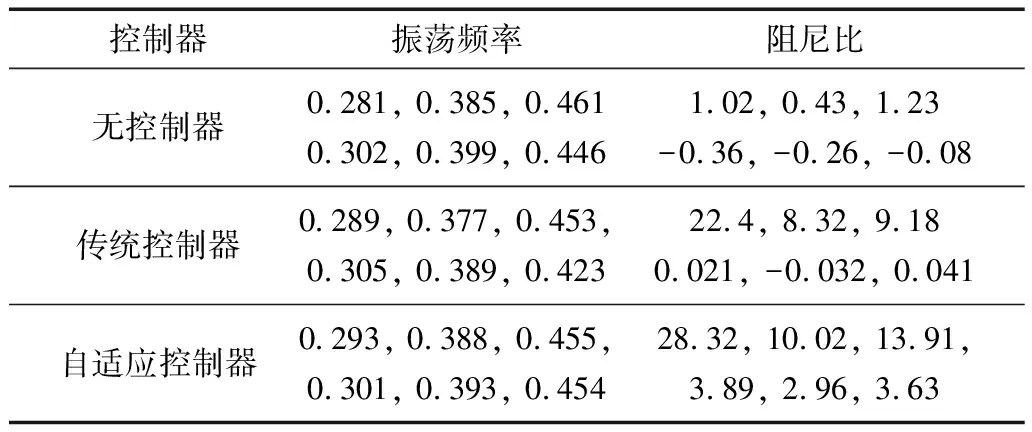
表2 受迫振荡下三种控制器的阻尼比
4.3 受迫振荡频率敏感度分析
为评估电力系统对受迫扰动频率的敏感度,在机组402处注入一个受迫扰动信号,其幅值为df(t)=0.25cos(2πft+π/2),其中f为受迫扰动频率,其以0.01 Hz的步长在0.1 Hz~0.9 Hz之间变化。为验证文中所提方法的振荡抑制性能,将所提方法与传统方法以及无控制器时的系统性能进行灵敏度分析。当采用所提自适应方法时,离散和连续控制器增益如图8所示。
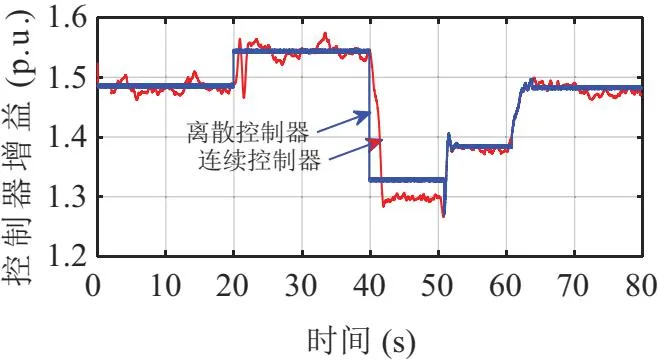
图8 文中所提离散型以及连续型控制器增益
在这种受迫扰动以及控制器增益下,系统的敏感度分析结果如图9所示。
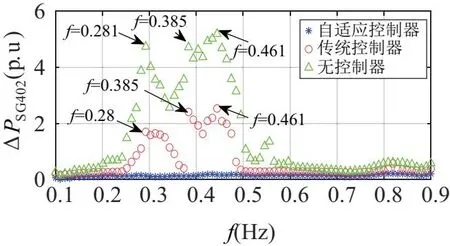
图9 采用三种控制方法时SG402功率变化敏感度分析
从图9可以看出,当不采取任何控制措施或应用传统控制器时,可以观察到较为明显的振荡现象,尤其是当f处于跨区域模态主导频率附近时,即f≈0.281,0.385,0.461,振荡现象更加明显。在某些情况下,系统将失去稳定性。因此,当某些振荡模态不能被有效抑制时,其将导致较高的振荡幅值。而当采用所提阻尼控制器时,能够有效抑制谐振现象的发生,进而提高系统稳定性。
4.4 与传统分析方法对比
为进一步验证文中所提方法的优越性,将所述自适应控制方法与文献[4]中所提受迫振荡隔离方法进行对比。采用一组周期性受迫扰动注入机组203中。当采用传统方法时,在t=5 s时检测到受迫振荡的发生,并将机组203切除。采用两种方法的仿真结果如图10所示。
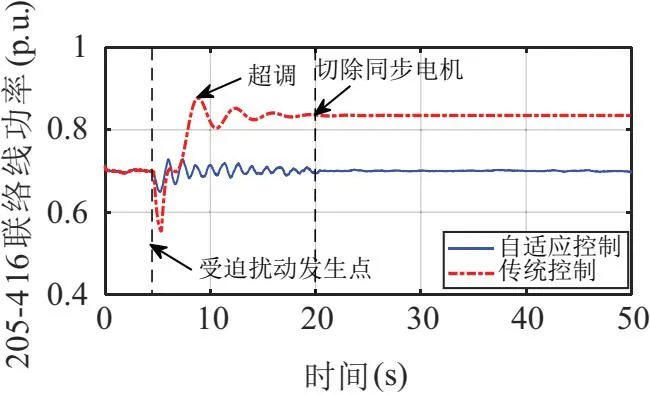
图10 采用两种控制方法时的暂态仿真结果
从图10中可以看出,受迫振荡对系统的影响的确能够通过切除机组来消除。然而,当采用传统方法时,联络线功率出现了严重超调现象。随后,系统将以低惯量状态达到新的运行平衡点。而同步电机从系统中切除会导致低惯量电力系统中转速、频率以及短期电压稳定性的降低。与之对应的是,文中所提出的离散自适应控制器则不需要这种切机操作,且其可以有效地抑制受迫振荡。因此,系统中周期性受迫振荡在10 s以后消失,而系统也恢复稳定。
5 结束语
文中提出了一种新型自适应控制方法用于同时抑制电力系统中存在的跨区域振荡以及受迫振荡。首先分析了含通信延迟以及受迫振荡的电力系统数学模型,并考虑三类主要因素的影响设计自适应控制器,即阻尼性能、互动因子以及抗干扰鲁棒特性。随后,通过自适应算法用于控制器参数的动态调参,进而实现对受迫振荡的抑制。通过在改进14机模型上的仿真算例,验证了文中所提自适应控制器的有效性及比对传统方法的优越性。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
数学物理学报(2019年4期)2019-10-10
贵州师范学院学报(2016年3期)2016-12-01
数学物理学报(2016年6期)2016-04-16
湖北经济学院学报·人文社科版(2015年8期)2015-12-29
电源技术(2015年11期)2015-08-22
上海电机学院学报(2015年4期)2015-02-28