基于UWB定位技术的作业风险管控智能终端设备研究
2024-02-21 09:41曾纪钧沈桂泉张金波
电测与仪表 2024年2期
曾纪钧,沈桂泉,张金波
(广东电网有限责任公司,广州 510600)
0 引 言
电网在发展的过程中,设备越来越多,危险点的区域也相应地增多,给现场检修人员的安全带来了隐患,在工作中不加小心,就容易引起人身事故和电网设备的损坏[1]。为了防止现场维护人员误入危险点,需要实时掌握维护人员的位置并在靠近危险点时自动发出告警。然而在室内环境中,GPS信号的强度很弱,不能够精准定位现场运行人员的位置,因此,室内定位作业风险管控智能终端的研究有重要意义。
现阶段公司现场作业风险基本由现场人员经验发现,缺乏相关的信息化工具进行辅助。人工识别的作业风险点往往存在风险点、风险等级识别不准确,风险点缺失,预防措施错漏等问题,给现场安全管理带来隐患。而定位技术的发展和应用为解决上述问题提供了方向。通过对比,UWB定位技术相较于其他定位技术具有抗干扰性强、稳定性高、响应速度快以及定位精度高的优点。在室内定位中应用较多。现在已有研究人员进行了相关研究,文献[2]针对环境中引起的定位误差,提出了测距误差估计和补偿的算法;文献[3]以最小成本和最大精度为优化目标,对UWB空间基站安装位置进行了优化部署;文献[4]为解决在非视距传输环境下精确地低的问题,在UWB算法中引入神经算法。以上研究主要从算法方面改进,没有从设备实际应用进行设计。因此,文中通过智能穿戴设备的应用,辅助现场人员在提前发现风险、作业中有效规避风险,同时能够与安全生产子系统进行数据对接,减少现场录入工作量,提升工作效率同时有助于提升现场风险管理水平[5]。
文中重点研究业风险管控智能终端设备的设计,包括智能头盔和室内定位系统。首先,比较了不同定位技术的优缺点,介绍UWB室内定位技术原理。设计了智能头盔,给出了设计参数和应用功能;进一步设计了室内定位系统配合智能头盔的使用。对UWB室内定位技术方案进行研究测试,包含定位模块集成、室内地图测绘、基站部署和电子围栏。
1 定位技术选择
为了提高现场作业人员的安全性,防止误入带电间隔,需要精准掌握现场人员的实时位置。目前应用比较普遍的定位技术有WIFI、RFID、蓝牙、UWB等技术,以下是这几种技术的选型分析。
(1)WIFI定位技术
WIFI定位[6-7]需要的硬件设备为无线传输的基站,需要确定位置的设备发出信号,而无线基站通过接收到的信号并结合自身的网络结构,综合确定待定位 WIFI 设备的坐标。WIFI 定位技术目前相对来说设备比较成熟,可以在现有设备的基础上实现,但由于 WIFI 的安全性较差,功耗较高,能够利用的频谱段也越来越少,因此,一般现在变电站、电厂等区域内不再使用。
(2)RFID定位
RFID,即射频识别技术[8-9],利用无线在比较短的距离内发现标签,距离的范围相对较广,几厘米 延长到十几米的距离。RFID[10]目前应用的领域还是主要以公司系统中人员的考勤为主。为了确定人员是否位于某个区域内,对于位置的传输定位不能做到实时的传输。目前应用也没有统一的规范标准,想要应用于变电站等环境复杂的地域,难度系数较大。
(3)蓝牙定位
蓝牙定位[11-12]基于RSSI(信号强度)值,通过三角定位原理进行定位。蓝牙定位的缺点是收环境因素的影响很大,因为蓝牙信号的频率很高,穿透能力很差。得到的RSSI 值存在着很大的误差,为了使测得的结果尽可能的准确,就只能通过算法来实现,但算法的使用,增加了CPU的负担,从而使定位容易产生延时。另外变电站等场地较大,想要实现信号的全覆盖,需要布置较多的基站从而增加投资成本。
(4)UWB定位
UWB(Ultra Wideband),即超宽带定位,利用时间周期很短的非正弦波进行数据的传递,作为一种无载的传输技术而被人们使用。UWB[13-14]调制同样采用纳秒级别的相当窄的脉冲性质的信号,包含的范围相对较广,可以实现从直流到达交流的程度,生成的脉冲则通过天线向外发射。UWB具有辐射性相对较低从而不影响其他电子通信设备、响应速度快、抵御其他信号扰动能力强的优点。
不同定位技术的比较在表1中给出,从抗干扰性、稳定性、响应速度以及定位精度综合考虑之后,决定采用UWB室内定位技术。
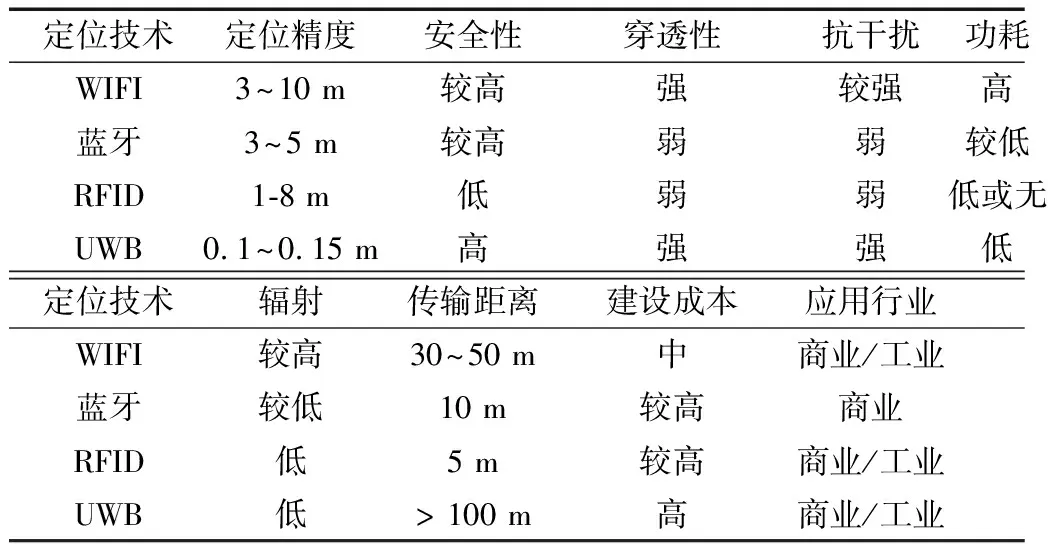
表1 多种定位技术的性能比较
2 UWB定位技术理论
UWB[15-16]测距使用的为飞行时间技术(Time of Flight, TOF),为了测得现场工作人员的位置,需要至少三个锚点(空间基站)和一个安装于智能头盔上的标签。根据电磁波在锚点和智能头盔之间的传输时间,得到传输距离,从而进行定位。文中采用往 返飞行时间(Two Way-Time of Flight, TW-TOF),此种算法不受空间基站和智能头盔上标签时间同步性的影响,只需测得电磁波在之间的时间差即可[17-18]。TW-TOF测量原理如图1所示。
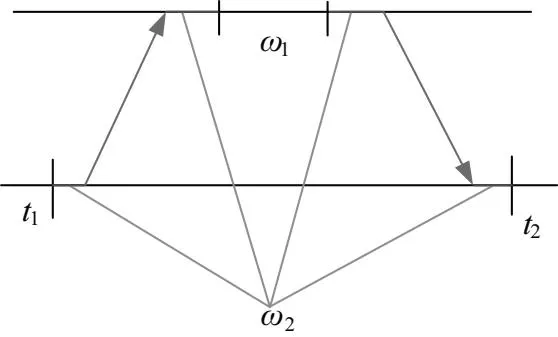
图1 TW-TOF测量模型
根据TW-TOF测量原理,对头戴智能头盔的现场巡视人员的定位步骤如下:
(1)根据电磁波在空间基站到头戴智能头盔的现场巡视人员之间传输的时间得到空间基站到运维人员之间的距离,计算公式如式(1)[19]所示:
(1)
(2)在室内环境中,不可避免的会出现遮挡物,而遮挡物对电磁波的传播有较大的影响,产生的误差符合非高斯分布,考虑到误差原因,头戴智能头盔的现场巡视人员与空间基站的距离[19]为:
Di=DTOF-DNLOS
(2)
(3)同样的原理,可以得到头戴智能头盔的现场巡视人员到其他两个空间基站的距离。空间基站的位置坐标在装设的时候已经给定,以现场人员到各个基站之间的距离Di为半径画圆,三个圆的交点即为现场人员的位置,计算公式如下:
(3)
(4)
(5)
(6)
3 智能头盔设计功能
3.1 智能头盔设计
智能头盔采用一体化设计,具备定位功能。带旋转臂,支持上下90°调整摄像头、照明灯。核心主板处理器ARM八核、2.0 GHz,安装内存(RAM)2 G/4 G,机身内存16 G/32 G/64 G,支持T-Flash卡,可扩展至128 G。电池容量5 400 mAh,默认2 A充电,支持qc3.03.5 A快充,配备1个Type-c口,支持USB接口双面插入,1个sim卡口和一个耳机插口。视频编解码支持4K@30fps、1080p60、H2.64、H2.65、VP8。工作环境为-20 ℃~60 ℃。智能头盔结构图如图2所示。
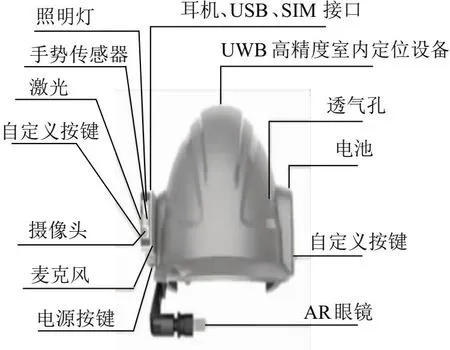
图2 智能头盔结构图
3.2 智能头盔功能
智能头盔主要功能为定位功能,同时集成视频采集、AR眼镜、多种功能模块,包括拍照、录像、照明、对讲、实时视频、GPS定位、轨迹记录、人脸识别、行为分析等。并能够使用智能手表、智能手机或者平板等智能终端通过蓝牙对头盔进行操控。
(1)通信功能
通信功能包含语音对讲、打电话、wifi、蓝牙、2 G/3 G/4 G网络、实时语音通信功能,数据通道主要包括采用2 G/3 G/4 G技术的APN专用通道、无线局域网等。
(2)实时监控模块[20]
管理者可以通过后台,实时查看前端作业现场的情况,并且可以对现场进行可视化沟通、指导。实时掌握现场工作的最新进展,便于第一时间发现现场的特殊问题。
(3)AR功能
关联设备台账信息,通过头盔采集的设备铭牌、标识牌信息进行后台算法分析,设备信息以文本方式显示于AR眼镜上,可以直观地了解设备基本情况及历史缺陷等。
(4)行为识别功能
可通过证件照及人脸识别判断目标资质,将判断结果进行语音播报或通过AR眼镜显示。可通过智能头盔摄像头识别作业人员是否佩戴安全帽,是否穿工作服,是否攀高以及判断是否跌落,识别结果可通过后台进行告警以及语音播报。智能头盔可实现语音指令输入,可进行语音—文本相互转换操作,实现表单业务语音录入功能,可结合电子围栏进行隐患推送,当作业人员靠近危险区域时,头盔进行语音播报提醒。
(5)现场记录
智能头盔内置16 G至64 G内存,支持T-Flash卡扩展(最大支持128 G)。智能头盔本地可保持现场的记录包含录像、录音、拍照、对讲记录、电话记录、模块运行记录、电池电量记录、流量记录、警报信息记录、硬件状态信息等。
(6)定位功能
智能头盔可实现室内外精确定位,同时支持GPS定位和北斗定位,支持扩展室内采用UWB定位技术误差可控制在厘米级别。UWB人员定位拓扑如图3所示。位置感知层通过空间基站和头盔中的定位标签确定现场人员的实时位置,网络传输层将测得的现场人员实时位置传输至应用层,将位置在显示屏上实时显示。
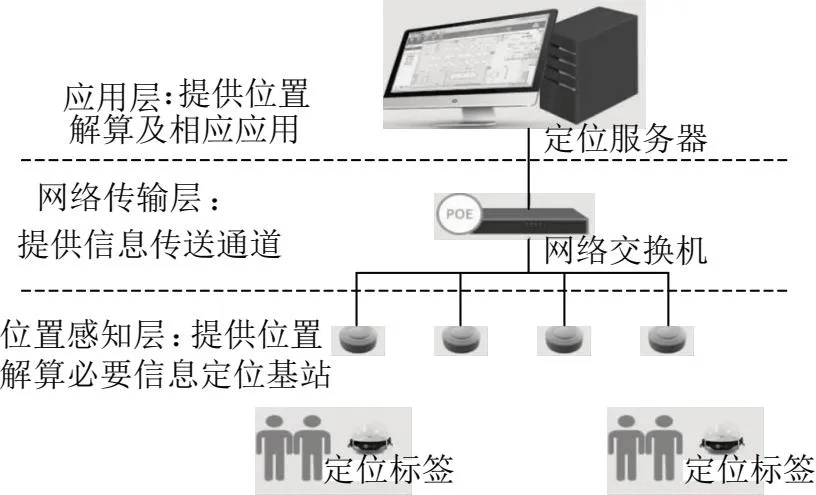
图3 UWB人员定位拓扑图
4 UWB定位技术研究测试
4.1 定位设备设计
对UWB室内定位技术方案进行研究测试,包含定位模块集成、室内地图测绘、基站部署和电子围栏。
(1)定位模块集成
定位模块集成是指将定位芯片集成到头盔,主要考虑到核心板结构更改,外观结构设计,以及定位天线与原有4G、wifi、gps等天线是否有干扰。采用实时定位测距功能的无线传输模块dwm1000,定位的原理为通过标签发送和接收到时间差来确定空间基站到现场人员智能头盔上标签之间的距离。dwm1000模块功耗低,接口为slave-only模式的spi接口,无线收发模块为cmos大规模集成电路单芯片usb模块。dwm1000模块的结构如图4所示。芯片内部包含模拟接收器,模拟发射器,状态控制器等。Dw1000与外接天线构成了完整的dwm1000模块。单片机作为通讯主机起着提供串行时钟信号的作用。Cs作为片选信号,当存在多个spi时可以在通讯设备中进行挑选。Miso用于发送需要传输的信号,plo定义总线空闲电平的数值,pha用于确定在不同时钟边沿触发的点。
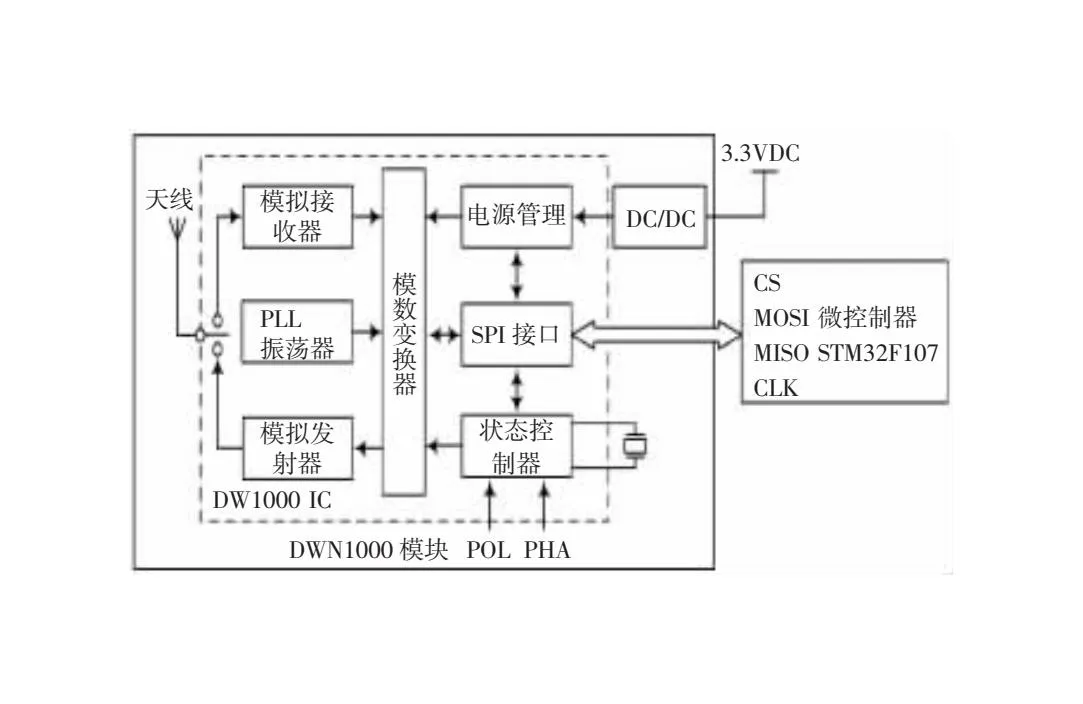
图4 dwm1000模块结构
(2)室内地图测绘
室内地图的测绘,包含室内地图的绘制与测量,室内地图的绘制,使用普通平面图即可,绘制完之后,需要使用激光测距仪[21]等尺寸测量工具,校准平面图的精度,这个精度最终会影响室内定位的效果呈现。试验地图及基站标注如图5所示。

图5 试验地图及基站标注示意图
(3)基站部署
通过室内平面图,选择基站最佳部署位置,充分了考虑室内环境(混凝土墙、障碍物等因素),根据环境调整基站位置,确定好基站位置之后,进行基站的安装,同时测量基站的位置,将基站的坐标存入数据库。基站坐标配置如表2所示。
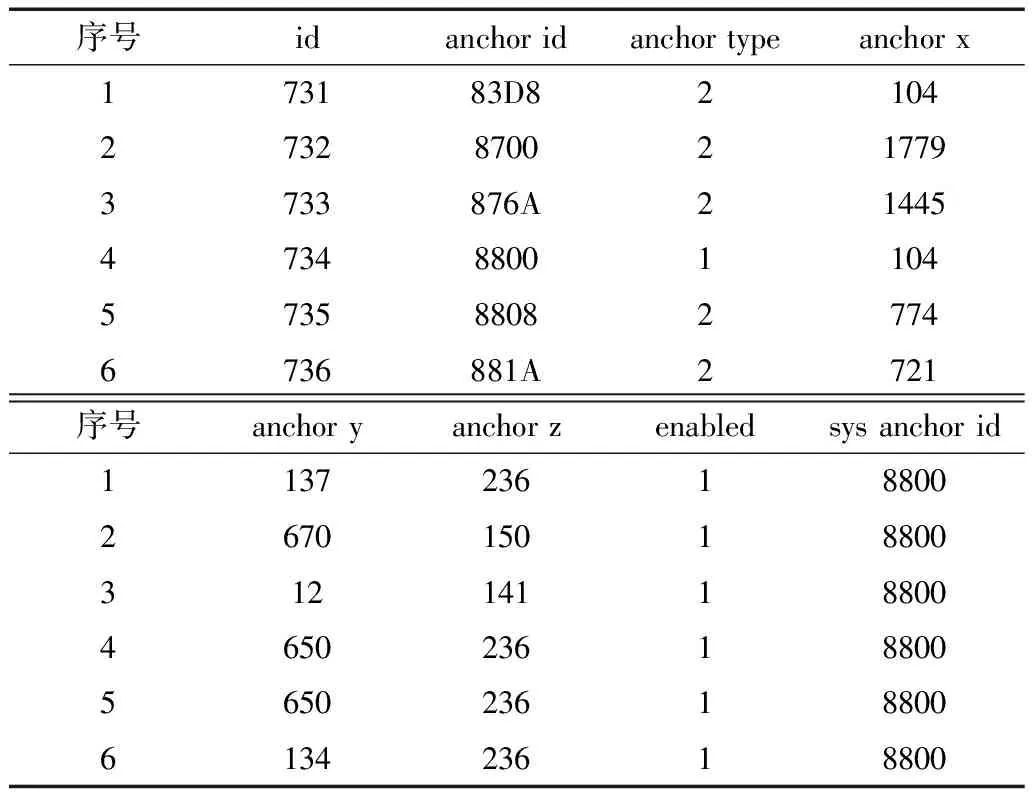
表2 基站坐标配置
定位系统参数配置如图6所示。参数主要包含基站的通用配置,静态IP配置等,一方面,检测基站的状态;另一方面,配置好数据传输通道。

图6 定位系统参数配置图
定位数据的传送,通过udp或者tcp协议,具体数据字段如表3所示。
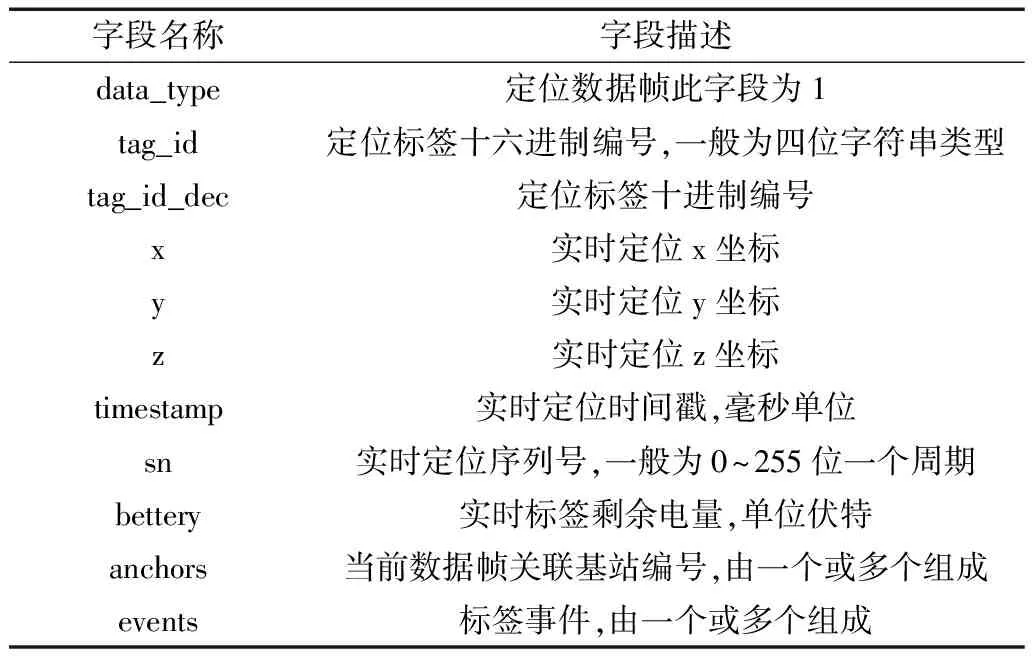
表3 数据字段描述
(4)电子围栏
电子围栏功能如图7所示。在室内地图上圈定范围,借助定位引擎返回的坐标,与电子围栏范围进行比较,不断计算目标是否落入该范围,只要落入该范围则进行告警。
4.2 实际应用
为了检验所设计基于UWB定位技术的作业风险管控智能终端设备室内定位的准确性。选择了两个实验人员佩戴智能头盔在搭建的作业现场,如图8所示。图中红色的三角标记为实验人员的位置。从图中可以看到两个实验人员的实时位置坐标,经过验证,误差率保证在厘米级别。

图8 室内定位示意图
5 结束语
文中重点研究智穿戴设备在电网现场作业风险管理中的应用,探索新型的现场风险管理可能性,融入现代科技,辅助现场管理人员开展安全作业管理。主要研究成果如下:
(1)对比了不同定位技术之间的性能,介绍了UWB在现场定位技术中的应用原理;
(2)设计了智能头盔,实现现场工作人员定位、视频采集、AR眼镜、多种功能模块,包括拍照、录像、照明、对讲、实时视频等功能;
(3)对UWB室内定位技术方案进行研究测试,包含定位模块集成、室内地图测绘、基站部署和电子围栏。
猜你喜欢
小学科学(学生版)(2021年10期)2021-12-28
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
红领巾·探索(2018年11期)2018-12-10
小哥白尼(军事科学)(2018年9期)2018-12-08
知识经济·中国直销(2018年3期)2018-04-12
探索科学(2017年4期)2017-05-04
小学生导刊(低年级)(2016年8期)2016-09-24
中国交通信息化(2016年8期)2016-06-06
移动通信(2015年17期)2015-08-24