
不同坐标系下六相PMSM单相开路容错MPC控制
2024-02-22 03:41袁凯蒋云昊袁雷郭勇丁怡丹
包装工程 2024年3期
袁凯,蒋云昊,袁雷*, 郭勇,丁怡丹
自动化与智能化技术
不同坐标系下六相PMSM单相开路容错MPC控制
袁凯1,蒋云昊1,袁雷1*, 郭勇2,丁怡丹1
(1.湖北工业大学 太阳能高效利用及储能运行控制湖北省重点实验室,武汉 430068; 2. 91184部队舰船保障室,青岛 266071)
目前六相永磁同步电机单相开路故障的模型预测容错控制的研究已逐步成为热点,本文将对和2种坐标系控制下的故障机理进行对比分析,并对比不同坐标系中下正常和故障容错运行模型的控制效果。基于矢量空间解耦坐标变换矩阵不变原理,对A相开路进行故障模型的理论计算分析,分别在和这2种不同坐标系中对其进行模型预测控制容错建模。最后在MATLAB/Simulink中对2种坐标系下的电机正常运行和故障容错运行中的工作性能采用相同电机参数进行实时仿真。仿真结果显示,正常运行时,2种坐标系下总谐波失真(THD)值分别为2.09%和2.77%;故障运行时,坐标系下的THD值比坐标系小了13.15%;容错运行时2种坐标系下的THD值分别为1.19%和1.79%。从仿真结果可以看出,坐标系控制下的电机在故障时具有更稳定的性能,而在正常和容错运行状态下,2种坐标系下的控制效果几乎等效。
六相永磁同步电机;模型预测电流;矢量空间解耦;开路故障分析;容错控制
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)驱动系统多用于包装产业的自动化生产线中,尤其是食品加工链等一些具有复杂包装工艺的场景应用更为广泛[1-2]。甚至有些高可靠性传输场合需要系统能够带故障运行,因此,PMSM在线容错运行研究逐步成为包装行业驱动系统的发展趋势。与传统三相电机对比,六相永磁同步电机随着相数的增加提高了系统的冗余度,在容错能力、转矩密度和工作效率上均有大幅提升[3]。上世纪90年代至今,多相电机绕组开路故障的容错控制逐步成为国内外研究热门,这些控制方案主要是基于转矩脉动最小原则和磁动势不变原则[4]。其中,转矩脉动最小容错控制策略[5-6]旨在通过多种数学算法对电流给定值进行计算调整,并使电机故障前后输出转矩不变;而以磁动势不变的容错控制[7]则是通过调整电流,使得电机在故障前后确保无扰运行的前提条件不变。
六相PMSM容错控制首先根据目标需求对其余正常相的参考电流进行优化计算,其次对计算出的参考电流进行跟踪。在现有的容错研究中,大多数将比例积分控制器用来对参考电流进行跟踪,但是由于其有限带宽,不能很好地跟踪交流量,在应对不平衡故障时使系统变得复杂[8]。也有研究用滞环控制器跟踪参考电流,虽然能实现很好的跟踪效果,但是存在开关损耗大、电流纹波大等问题,整体控制效果欠佳[9]。而模型预测控制(Model Predictive Control,MPC)以其结构简单,无需PI整定,预测行为精准,跟踪响应快速的特点在多相PMSM容错参考电流跟踪控制中运用得越来越广泛[10-11]。目前,根据磁动势不变原则,六相PMSM电机单相开路故障容错MPC控制主要分为2种。一种是将故障相切除,Guzman等[12]在坐标系构建五相PMSM的单相降维解耦变换模型,实现基于MPCC的故障后操作。这需要重新配置控制器的结构,根据不同电机系统分别建模,且通常需要通过额外补偿来消除故障带来的不平衡,这一定程度上提高了容错模型的复杂度。另一种是Lu等[13-14]在坐标系下基于矢量空间解耦(Vector Space Decouples,VSD)变换不变对单相开路的六相PMSM进行MPCC容错控制,这样避免了变换矩阵的重新配置,且不需要考虑不同的中性点连接方式,降低了容错系统模型复杂度。
但是在现有的基于故障前后矩阵变换不变的容错控制研究中,没有在坐标系与坐标系控制系统中分别进行MPC容错控制对比分析为进一步探究二者区别,本文基于VSD解耦矩阵不变原理对六相永磁同步电机的2种不同的坐标系进行A相开路故障机理对比分析和有限集模型预测控制(Finite Control Set-Model Predictive Control,FCS-MPC)容错建模,最后通过仿真对比分析2种坐标系下的故障运行状态和容错效果。
1 六相永磁同步电机驱动系统模型
1.1 六相PMSM基本数学模型
相移30°的六相电机驱动系统如图1所示。假设定子电流和转子永磁体产生的气隙磁链都呈正弦分布,忽略铁心磁饱和效应和电机绕组间的互漏感且转子没有阻尼缠绕。
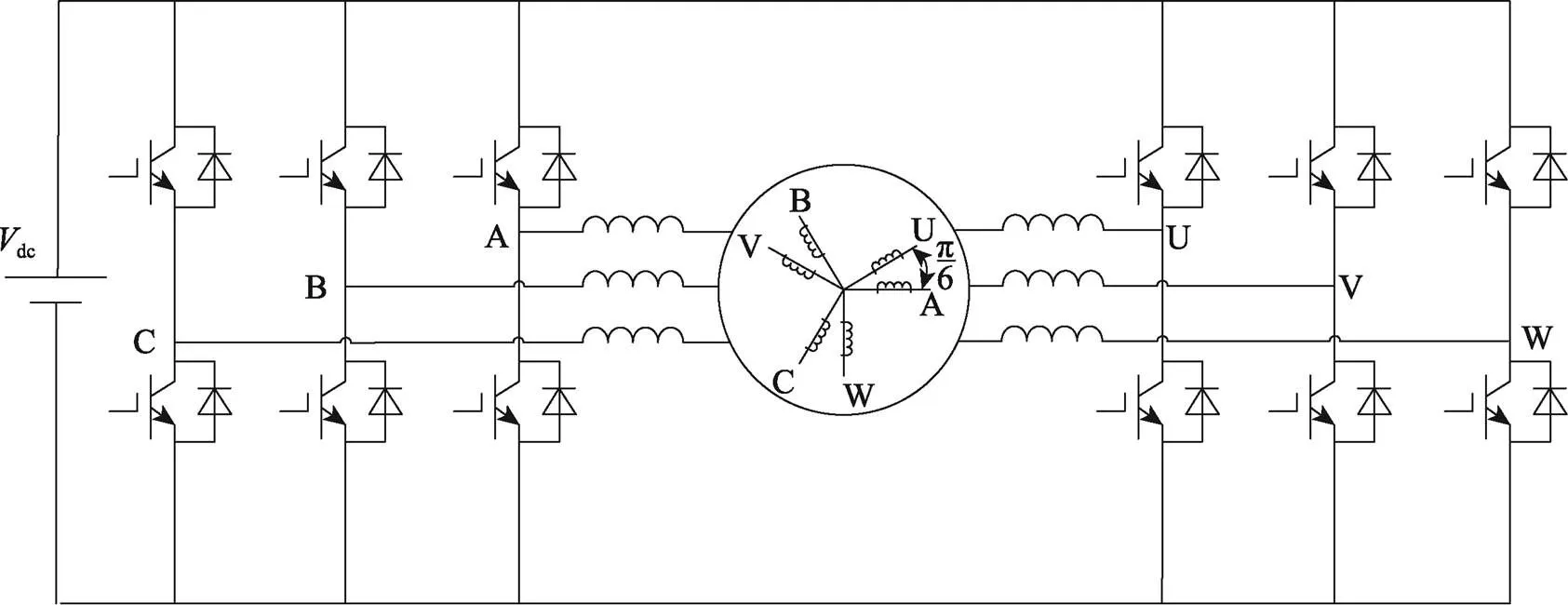
图1 六相PMSM的电机绕组拓扑
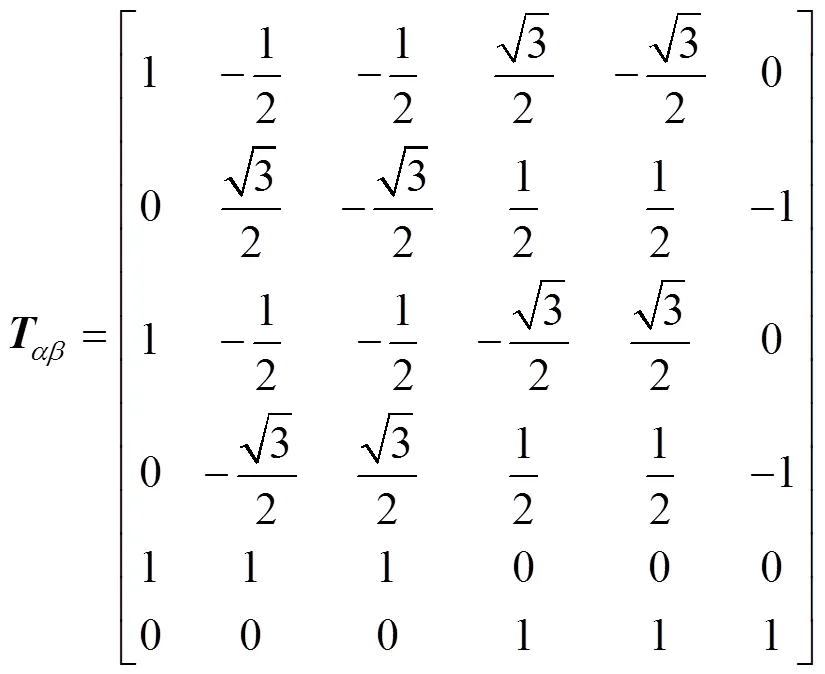
为了简化模型,采用VSD变换方法,将自然坐标系的各个变量通过Clarke变换转换到静止坐标系下,其变换矩阵为:
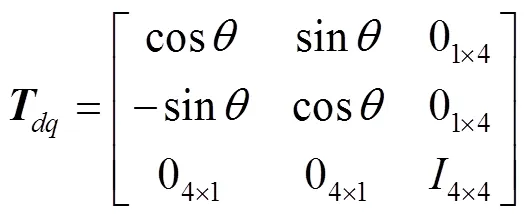
利用旋转矩阵可以将静止坐标系变换到旋转坐标系,见式(2)。
为抑制零序电流,六相PMSM运行时采用中性点隔离方式,使得零序电压为0。为了后续更好地对驱动系统进行模型预测控制,可以在各坐标系不同子空间下用如下电流方程建模[15]。
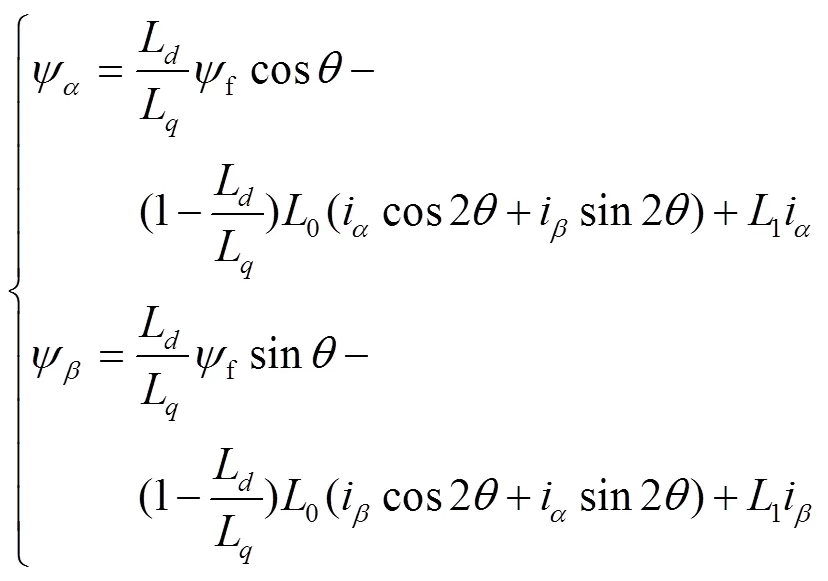
静止坐标系下的子空间的电流表达:

谐波子空间电流表达式:
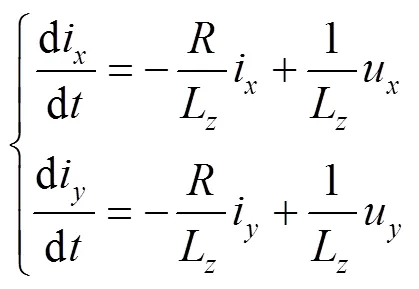
式中:L和L分别为绕组的轴和轴主自感;L为自漏感;0=(+)/2;1=(–)/2,e为电角速度;为定子电阻;f为转子磁链;、为、轴磁链分量;为转子纵轴与A相轴线的夹角;、、、分别为-轴电压和电流;u、u、i、i分别为轴的电压和电流。
同步旋转坐标系下的基波子空间电流表达式:
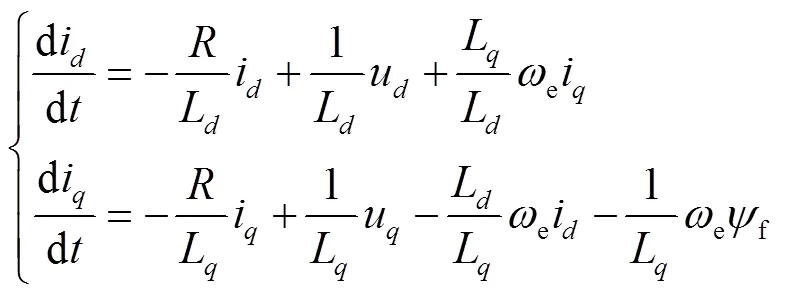
式中:u、u、i、i分别为轴电压和电流。由于子空间不参与机电能量转换,且不含的位置函数。因此,在旋转坐标系下,子空间谐波电流仍如式(5)所示。
2种不同坐标系控制系统下的电磁转矩方程分别见式(7)和式(8)[16]。
式中:n为六相永磁同步电机极对数。
运动方程为:
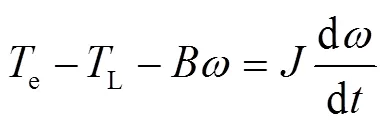
式中:e为电磁转矩;L为负载转矩;为阻尼系数;为转动惯量;为机械角速度。
1.2 正常运行下的六相PMSM模型预测电流控制
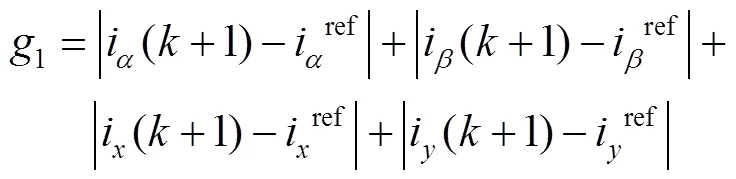
式中:ref、ref、iref、iref分别为基波和谐波电流的参考值。坐标系下的MPC控制图如图2所示。
选择和子空间电流作为优化对象,则坐标系控制下的代价函数为:

式中:iref、iref分别为基波电流的参考值,控制框图如图3所示。
图2 α-β坐标系下MPC控制框图
Fig.2 MPC control block diagram in α-β coordinate system
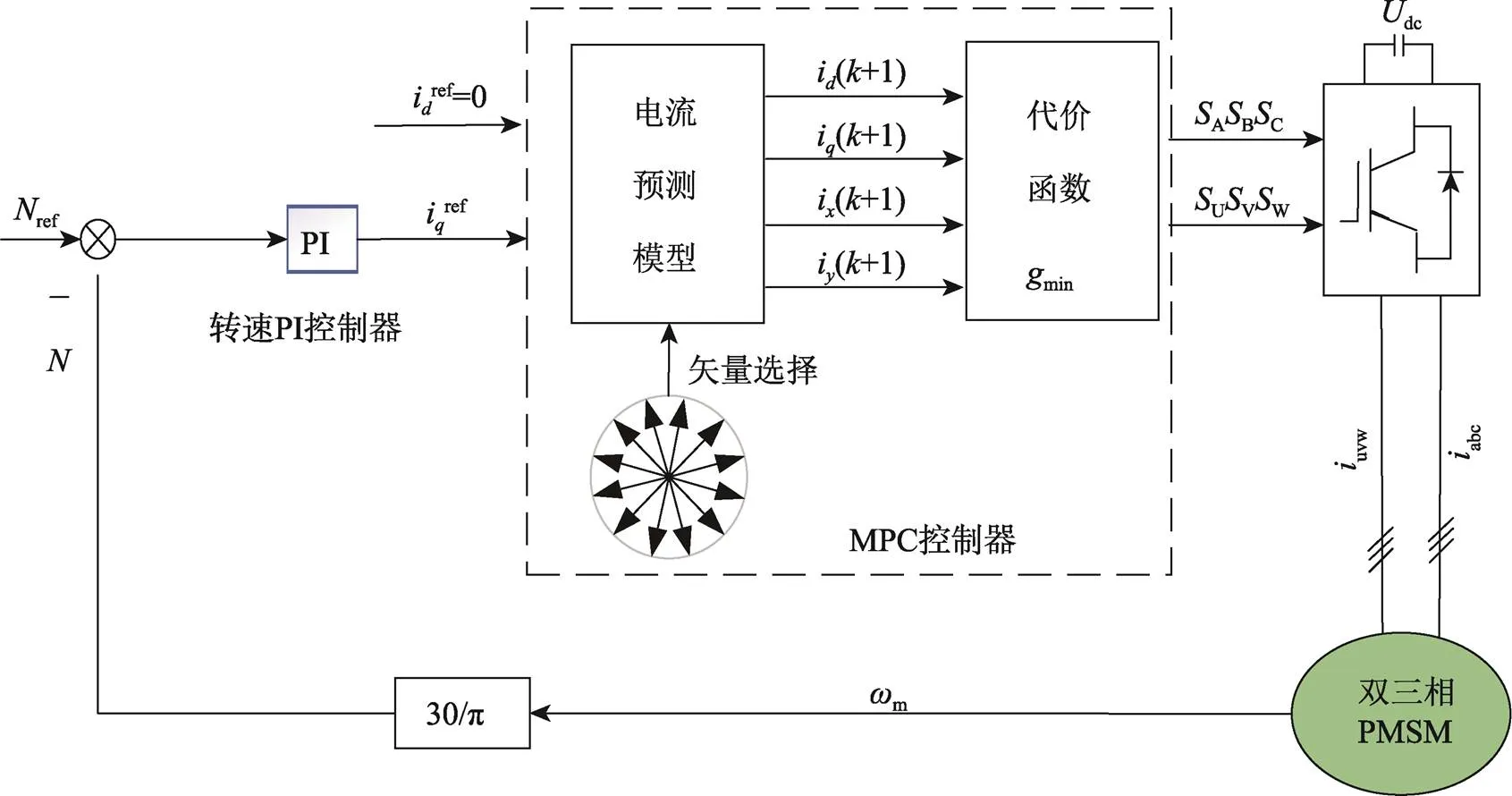
图3 d-q坐标系下MPC控制框图
与此同时,为简化模型时提高直流利用率,选择十二个最大幅值的电压矢量作为FCS-MPC中的基本矢量进行代价函数寻优。选择出使代价函数最小的最优电压矢量运用到下一周期的逆变器中[17]。
2 六相PMSM一相开路容错控制策略
如图4所示,假设六相PMSM的A相绕组与逆变器接线端断开,且电机绕组并未损坏,则A相电流突变为0,此时A相电压变为感应反电动势,电压变化量在图4中用ΔA表示,其他相绕组缺失了A相对其的互感磁通分量。目前针对这种一相开路故障,现有的MPC容错控制基本都通过构建降耦模型,改变电感矩阵来实现,这需要重新配置控制器结构,提升系统在线容错的复杂度。因此下文将对开路故障机理进行理论分析,并基于VSD变换矩阵不变原则构建在线容错MPC模型。
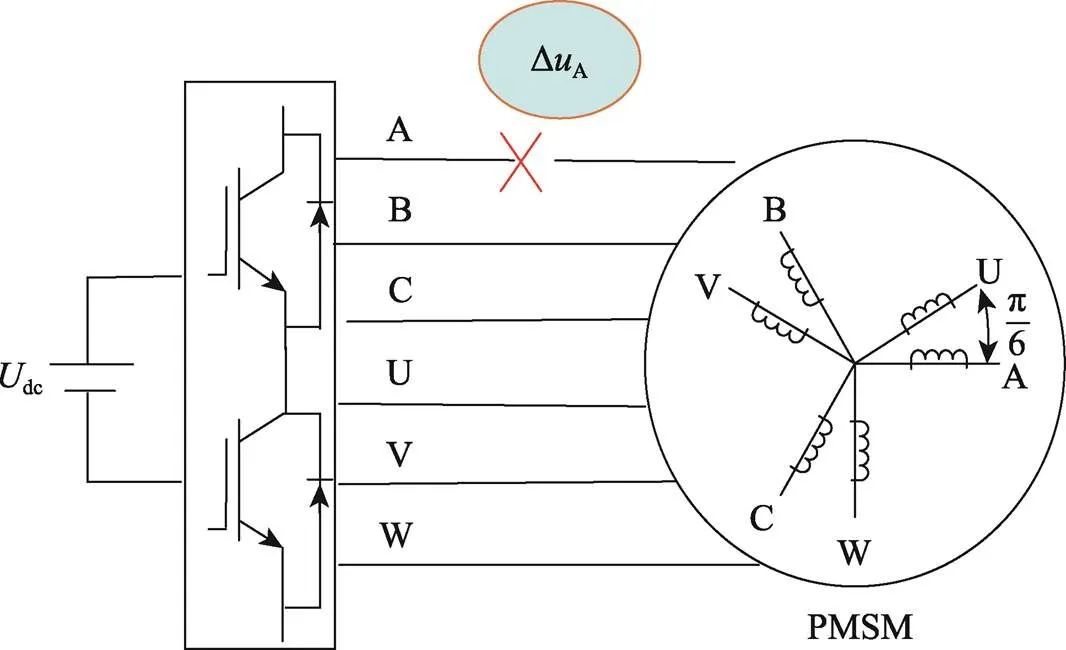
图4 A相绕组开路故障电机拓扑
2.1 六相PMSM一相开路故障分析
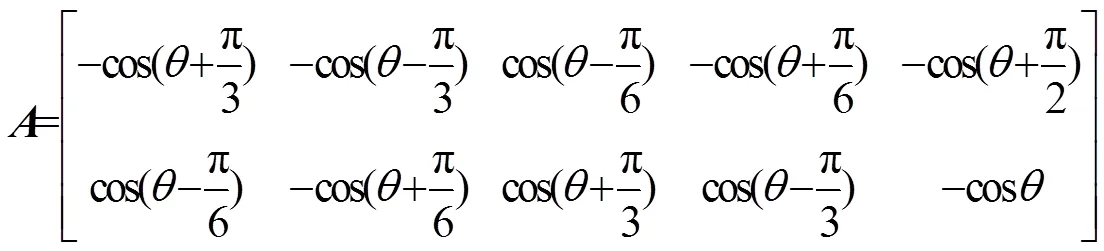
通过分析A相开路时的自然坐标系数学模型,并将故障条件带入计算,可将故障状态下的轴电压和轴电压由其余健康的五相电流表达,其结果如下:
雨鸾停下修长的手指,沉思片刻说:“白轩,风将光吹成线,成为曲,琴声也是线,也是曲,明天我们早一点起床,去落星湖边练练你的风光剑吧!”她的嗓音真好听,落星湖边树丛里的千百只黄鹂,没有一只黄鹂唱出的声音会超过她。


式中:为微分算子;5s=[B,C,U,V,W]T为剩余五相电流;

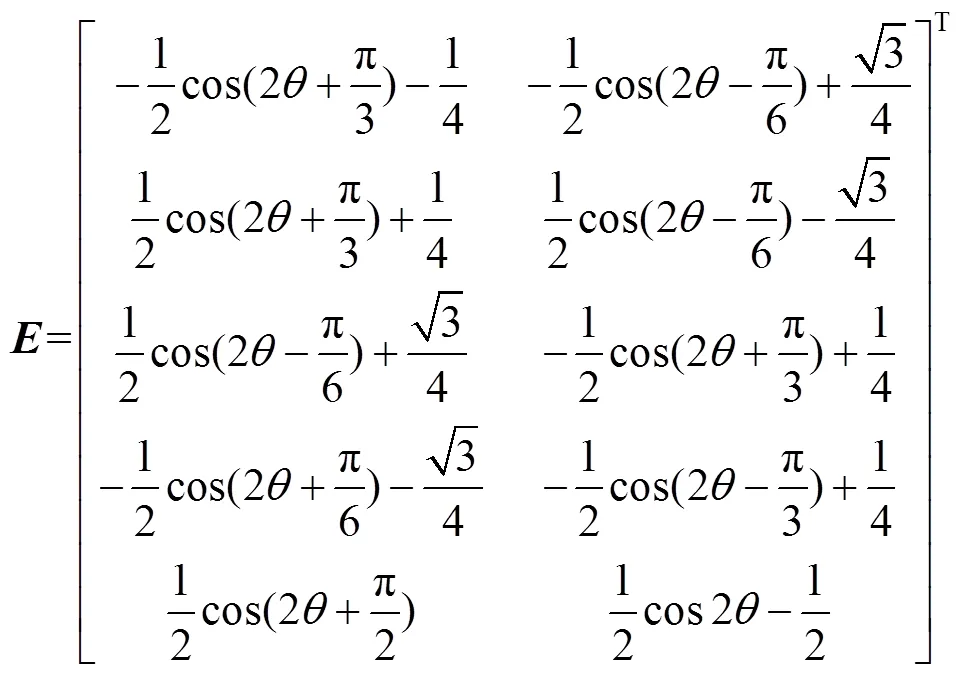

由式(12)~(13)可知,A相开路故障对和轴电压都带来了很大的影响,在基于这2种坐标系的故障MPC控制模型中出现了大量的谐波分量。特别是在式(13)所示的轴系故障电压中可以看到,在A相开路故障下,由电感带来的耦合项中出现大量的二次谐波分量,这使得电机在故障运行状态下的动态性能较坐标系控制系统出现明显的偏差。
如果要让电机在不停机状态下完成在线容错控制,则需要通过其他健康相来定向补偿A相的电压,以此来维持电机正常工作。
在VSD解耦变换矩阵不变的情况下,由于位移30°的六相电机相电压仍遵循对称约束,则相电压可以由线电压表示为:

在故障后,和子空间上的电压可以用式(14)中的线电压和故障A相电压,以及式(1)中的VSD矩阵来表示,如式(15)所示。
其中,在A相开路故障后,线电压BC、UV、VW均不变,只有A发生了突变。因此,容错补偿的关键是推导出开路故障前后的电压差ΔA。根据文献[18],可以类似推导出在A相开路故障前后的电压差[18]。这个电压差可由U、V两相电流精确表达如下:

对式(16)进行前向差分离散化,并结合Clarke变换可以得到补偿电压模型:
由式(2)可知,A的变化直接影响和u,则和子空间电压分量的变化可以表示为:
2.2 基于VSD坐标变换不变的MPC容错控制
在解耦变换矩阵不变的容错条件下,将2.1节中对A相开路条件下的电压补偿计算结果分别运用到2种坐标系的补偿模型中实现容错控制,总体容错系统框图如图5所示。在A相开路故障发生后,控制系统计算出故障相的电压差ΔA并在MPC算法和预测模块中及时对故障前后Δ、Δu等各部分差值进行在线补偿,最后通过代价函数寻优出最优开关矢量组合,并以此控制电机。虚线框中的值为坐标变换控制系统中区别于坐标变换控制系统的对应分量。下面将重点介绍2个不同控制系统中的参考电流给定和电压扰动项补偿计算。
2.2.1坐标变换下MPC容错控制
在坐标系下,由式(1)可知A相电流突变为0,会直接影响到电流分量i和i,即i和i不再解耦。因此便失去了一个电流控制自由度,且在中性点相互隔离的连接方式中不需要考虑零序子空间。
由于电机的转矩输出仅由基波子空间决定,因此必须优先保证子空间的控制自由度。如果此时继续将谐波子空间中的电流参考值给定为0,则必然会产生较大的转矩脉动。采用定子铜耗最小控制的优化条件对谐波子空间进行电流参考值约束,且由式(19)可知,i不受A相电流的约束,因此需将i的参考值给定为0,以使铜耗最小。综上,可将该控制系统的参考电流给定如式(20)所示。

通过式(17)和式(18)可以精确计算得到补偿后的电压变动值,即:
式中:u()和u()分别为时刻正常运行状态下的和轴电压。
2.2.2坐标变换下MPC容错控制
在坐标系下,由式(2)可以推出故障时,实际电流i、i和i之间的电流约束变为:

由图3可知,该坐标系控制系统下i的给定为0,则在最小铜耗控制下谐波子空间电流必须利用式(23)中的约束被动控制。
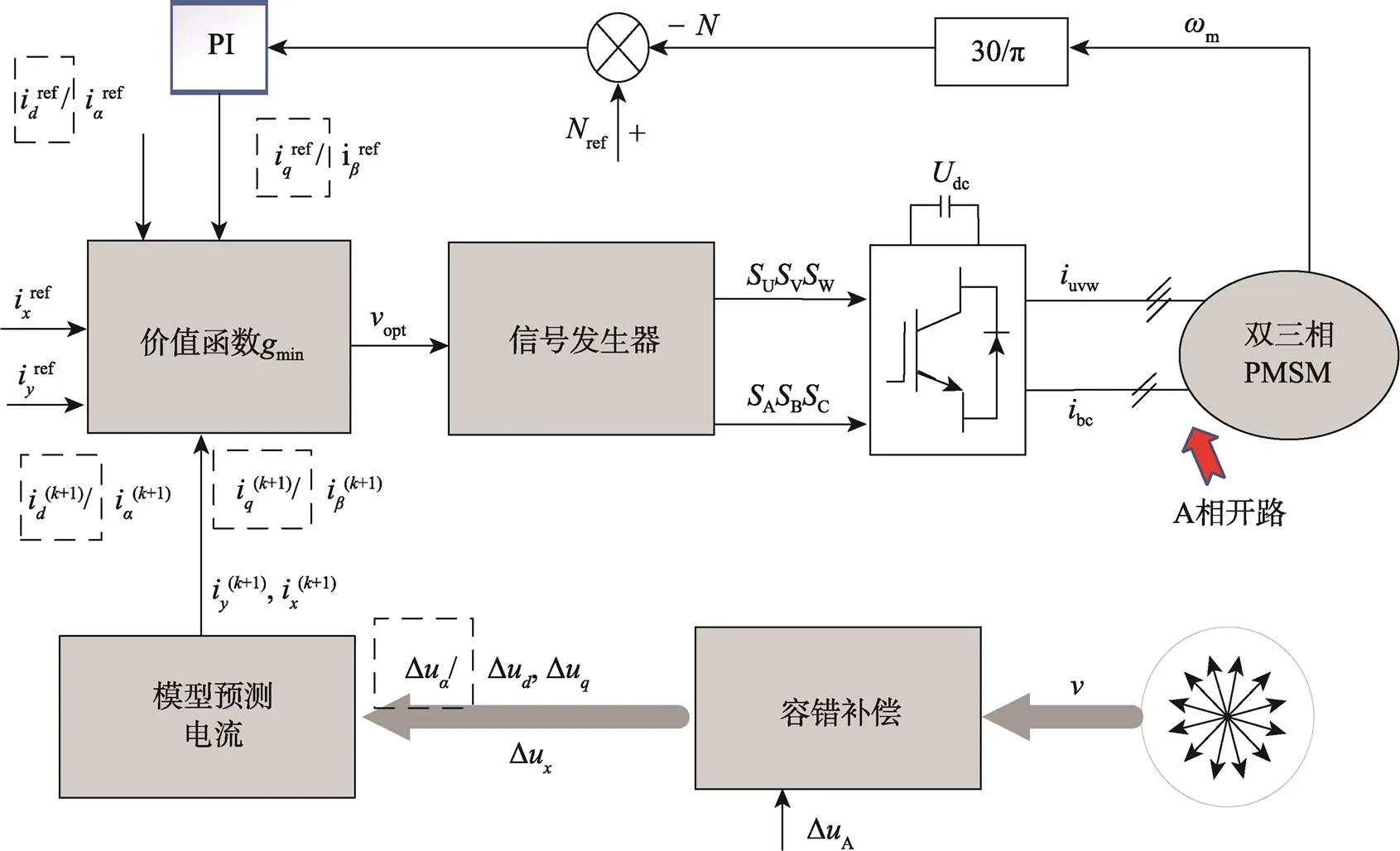
图5 A相开路的MPC容错控制系统框图
为简化计算,将式(21)通过式(2)转换到坐标系下,可得电压补偿后的电压变动。

式中:u()和u()分别为时刻正常运行状态下的轴和轴电压。
3 仿真验证
为了更加直观地对比分析坐标系和坐标系这2种不同坐标系下的容错控制效果,在MATLAB/Simulink环境中分别搭建了基于不同坐标系下六相PMSM的VSD坐标变换不变的MPC在线容错控制仿真模型。对正常、故障和容错运行3种状态下的定子绕组相电流和电机输出的转矩分别进行对比分析,仿真参数如下:电机定子电阻为0.958 Ω,交/直轴电感分别为3.45、6.85 mH,极对数为4,转动惯量为0.003,永磁体磁链为0.182 7 Wb,给定转速为1 500 r/min,直流侧电压为500 V。
在仿真初始时刻,电机正常空载运行。=0.1 s时,给电机突加10 N·m的负载转矩,此时电机带载正常运行;=0.2 s时,断开A相与逆变器之间的连接线,形成电机带载故障运行;=0.3 s时,在线切换至容错控制,此时电机带载容错工作。由于在容错控制中解耦变换阵不变,此时电压、磁链和转矩均恢复正常,只是电流幅值变化到最小铜耗状态。仿真时长共0.4 s,分别对2种坐标系控制策略进行对比仿真,结果如下。
由图6可知,在0.2~0.3 s,电机带载故障运行,可以看到当A相开路时,A相电流变为0且直接影响U相和V相电流,使其失真。在0.3 s时电机开始容错运行,正常相电压趋于饱和。对比图6a和图6b可知,2种不同坐标系下的容错电流效果一样。
不同坐标系MPC控制下的电机输出电磁转矩和转速仿真结果分别如图7和图8所示。在0.1~0.2 s时,电机带载正常运行;在0.2~0.3 s时,电机带载故障运行,此时坐标系下MPC控制中故障的转矩和转速脉动更小,电机抖震会更小且更缓;0.3 s后2种坐标系容错控制都使转速迅速恢复,使电机正常带载运行。从容错结果和正常运行跟随效果来看,可以发现2种坐标系控制下的结果几乎没有区别。
分别从2种不同坐标系MPC控制中的电流结果中截取0.26~0.27 s故障运行时间段的数据进行数据处理,导出电流如图9所示。由于电机故障运行,此时的电流图已经不再满足一个完好的圆形,并且不同坐标系下的MPC控制会使得电流数据出现偏差,自然电流图也就不尽相同。从图9中可以明显看出,坐标系控制下的电流图畸变更小。
为对比分析不同坐标系MPC控制对系统稳态性能的影响,对六相PMSM 2种坐标控制正常、故障和容错3种运行状态下的U相电流做了FFT谐波分析,结果如图10。在图10a和图10b中,2种不同坐标系控制的正常运行系统下总谐波失真(THD)值分别为2.09%和2.77%。在图10c和图10d中,可以看到在故障工作时,坐标系控制系统下THD值为27.67%,较坐标系控制系统中的14.52%有较大的增幅,这大大降低了系统的稳态性能。同时,由于故障时坐标系MPC控制模型中存在大量二倍频系数,故在谐波分析中出现了大量的二次谐波分量,这是坐标系控制系统中所没有的。容错后的分析如图10e和图10f所示。由于在参考电流中进行了谐波控制,容错后的总谐波失真THD值有所降低,2种控制策略中的THD值分别为1.19%和1.79%。
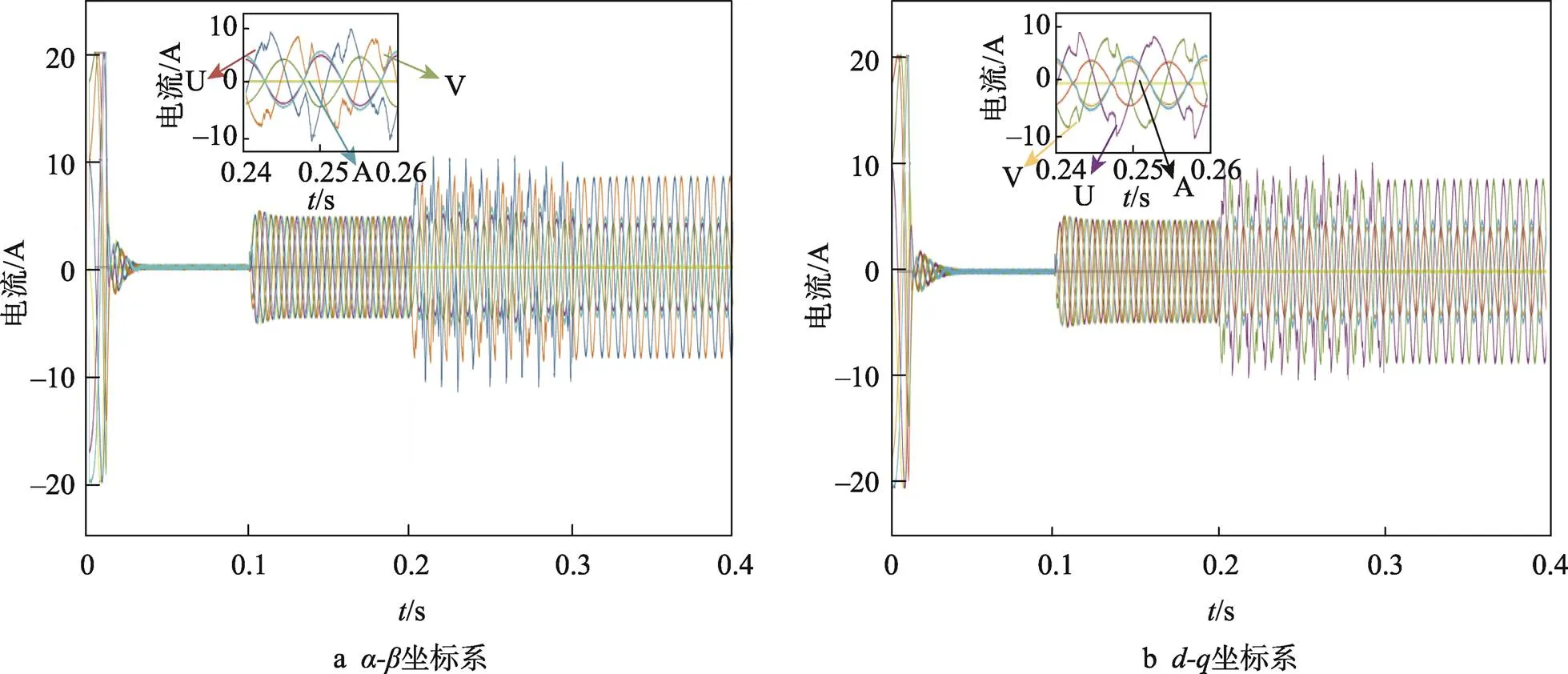
图6 不同坐标系下MPC控制电流仿真结果
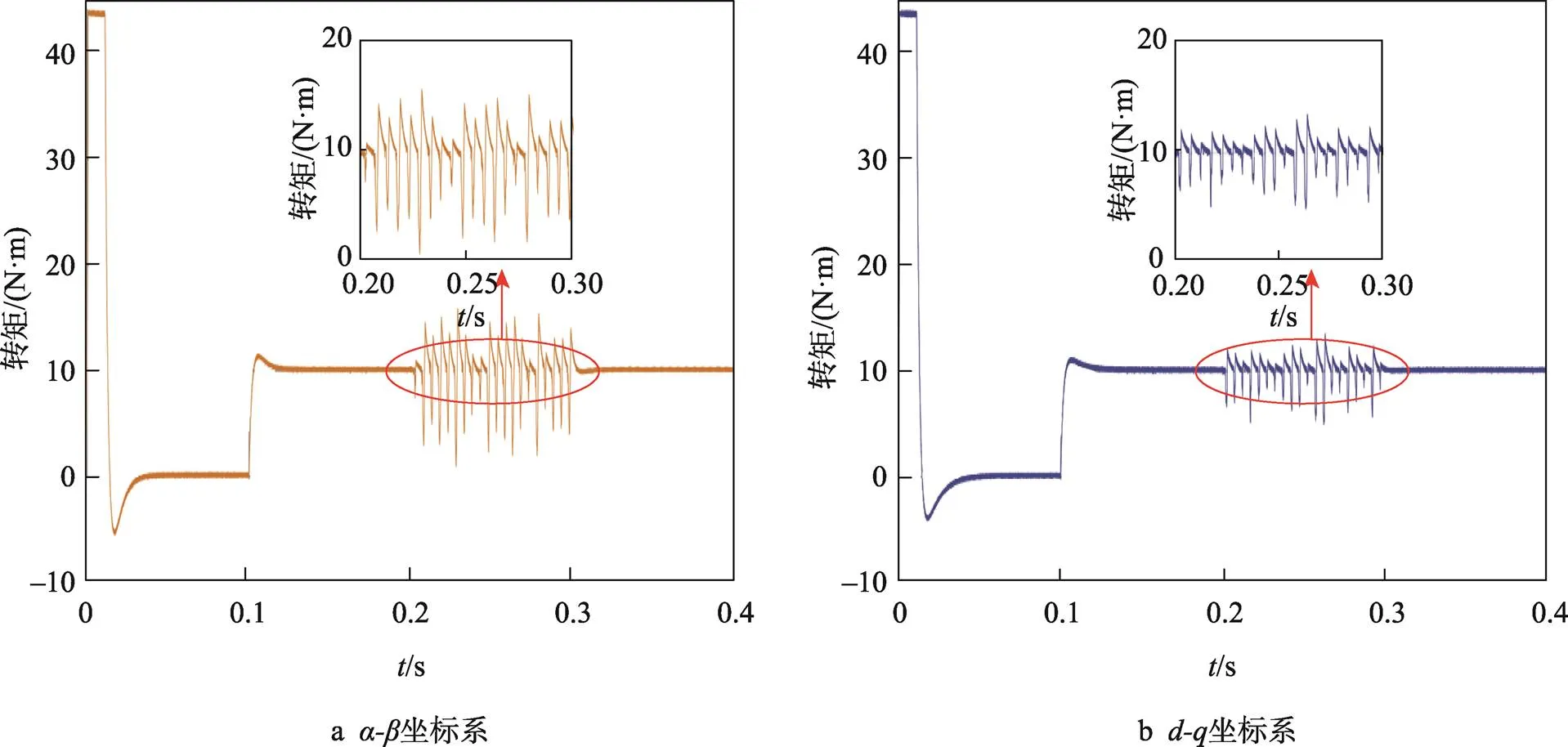
图7 不同坐标系下MPC转矩仿真结果
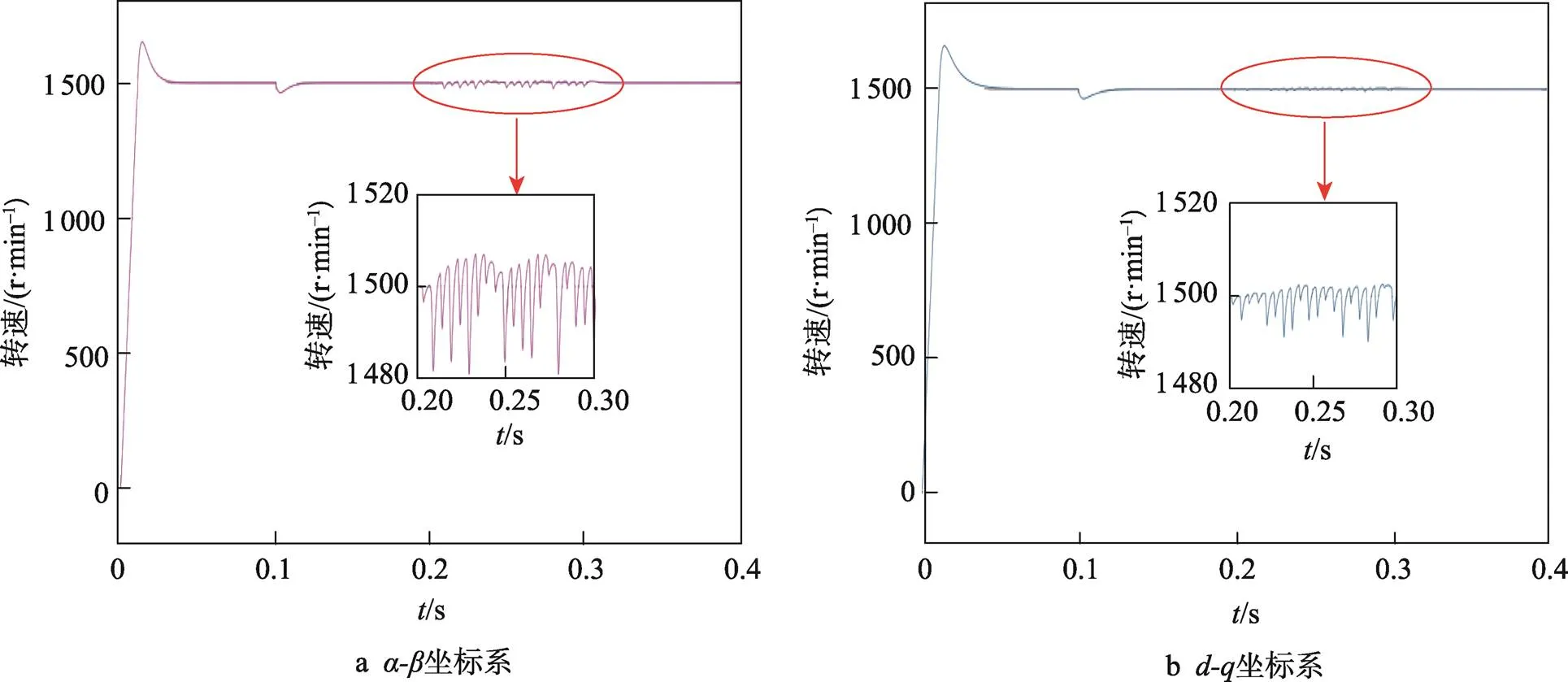
图8 不同坐标系下MPC转速仿真结果

图9 不同坐标系下MPC控制α、β轴电流
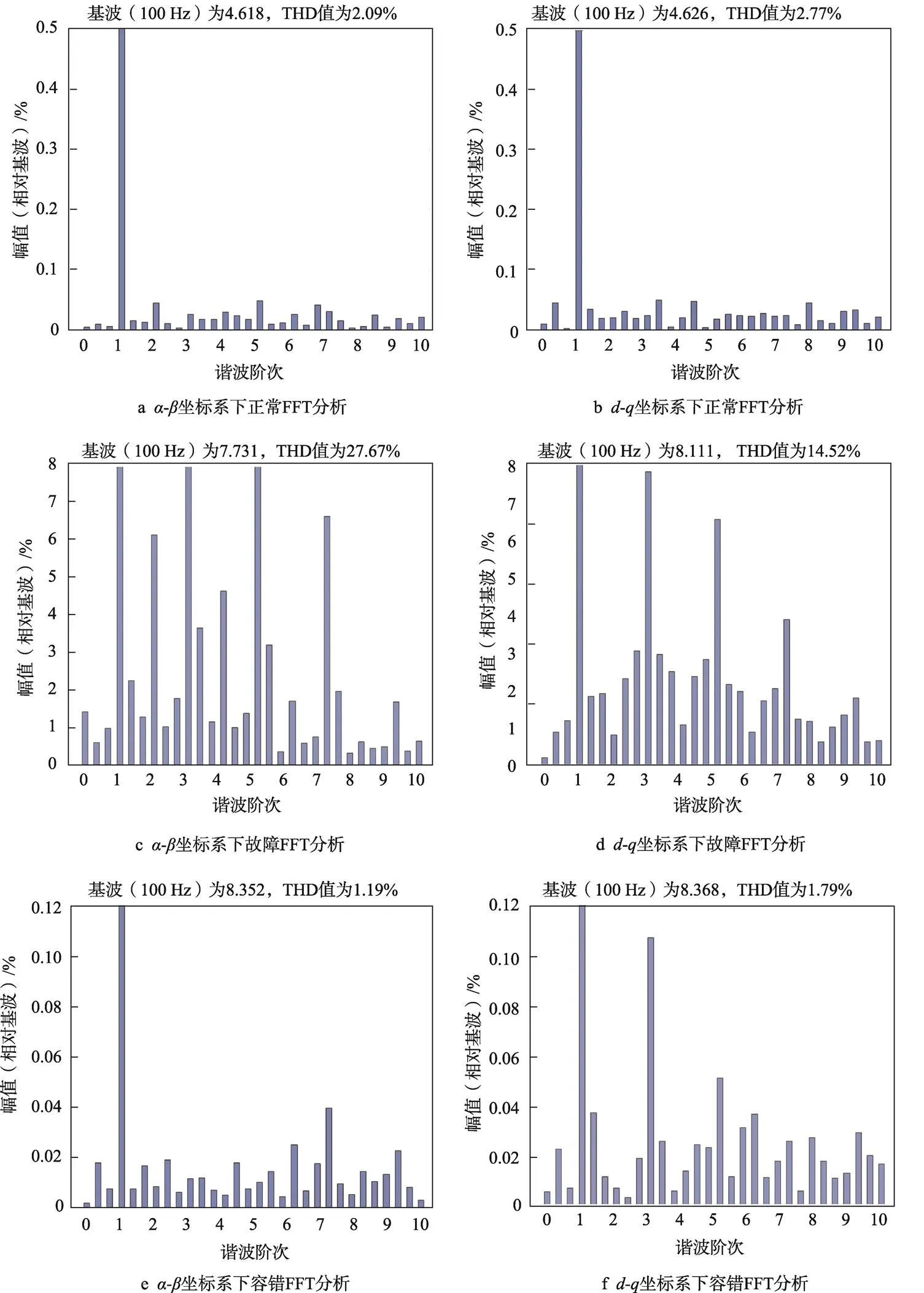
图10 3种运行状态在不同坐标系下电流的FFT分析
4 结语
基于VSD坐标变换不变的MPC容错控制研究中还没有基于坐标系和坐标系进行容错补偿效果的对比分析。针对六相永磁同步电机A相开路故障,对这2种坐标系控制系统分别分析故障机理,并进行在线容错补偿计算,在MATLAB/ Simulink中进行实时仿真,对比分析2种坐标系下的正常、故障和容错3种运行状态的控制效果。结果表明,在正常运行和容错运行阶段,坐标系MPC控制系统中的THD值比坐标系MPC控制系统中的分别小0.68%和0.60%,因此2种不同坐标系在这2种运行工况下的控制效果几乎相同。但是在故障运行阶段,坐标系下控制系统中的电磁转矩和转速脉动更稳定,且总体谐波失真THD值也比坐标系下小13.15%,在故障阶段能够更好地保护电机。总之,基于坐标系的MPC容错控制方案在模型简单的基础上不仅能保证电机在故障时具有更好的稳态性能,而且在正常和容错工况下也有较好的控制效果。下一步工作将对不同坐标系下的容错控制策略进行实际的应用效果对比,在实际工作情况中找寻不足,并进行完善。
[1] 韩琨, 张长征, 袁雷. 基于超螺旋滑模扰动观测器的永磁同步电机无传感器抗干扰控制策略研究[J]. 包装工程, 2023, 44(3): 139-147.
HAN K, ZHANG C Z, YUAN L. Sensorless Anti-Disturbance Control Strategy of Permanent Magnet Synchronous Motor Based on Super-Twisting Sliding Mode Disturbance Observer[J]. Packaging Engineering, 2023, 44(3): 139-147.
[2] 金爱娟, 王硕勋, 李少龙, 等. 基于改进超螺旋算法的永磁同步电动机控制[J]. 包装工程, 2022, 43(19): 198-207.
JIN A J, WANG S X, LI S L, et al. Control of Permanent Magnet Synchronous Motor Based on Improved Super Twisting Algorithm[J]. Packaging Engineering, 2022, 43(19): 198-207.
[3] XU J Q, GUO S, GUO H, et al, Fault-Tolerant Current Control of Six-Phase Permanent Magnet Motor With Multifrequency Quasi-Proportional-Resonant Control and Feedforward Compensation for Aerospace Drives[J]. IEEE Transactions on Power Electronics, 2023, 38(1): 283-293.
[4] 史奔奔. 双三相永磁同步电机缺相容错运行效率优化控制策略研究[D]. 西安: 西安理工大学, 2023: 23-25.
SHI B B. Study on Optimal Control Strategy for Fault-Tolerant Operation Efficiency of Double-Three- Phase Permanent Magnet Synchronous Motor[D]. Xi'an: Xi'an University of Technology, 2023: 23-25.
[5] 郑博元, 李炳均, 徐永向, 等. 考虑电压约束时双三相永磁同步电机一相开路的建模与容错控制策略[J]. 中国电机工程学报, 2023, 43(1): 294-303.
ZHENG B Y, LI B J, XU Y X, et al. Modeling and Fault-Tolerant Control for DTP-PMSM with one Phase Open Circuit Fault Considering Voltage Constraints[J]. Proceedings of the CSEE, 2023, 43(1): 294-303.
[6] JIN L H, MAO Y, WANG X Q, et al. Optimization-Based Maximum-Torque Fault-Tolerant Control of Dual Three-Phase PMSM Drives Under Open-Phase Fault[J]. IEEE Transactions on Power Electronics, 2023, 38(3): 3653-3663.
[7] HUANG W T, HUANG M J, LUO L Y, et al. Open-Circuit Fault-Tolerant Control of Five-Phase PMSM Drives[C]// 2022 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Haining, China, 2022: 1-5.
[8] GONZÁLEZ-PRIETO, DURAN M J, BARRERO F J. Fault-Tolerant Control of Six-Phase Induction Motor Drives With Variable Current Injection[J]. IEEE Transactions on Power Electronics, 2017, 32(10): 7894-7903.
[9] 周长攀, 杨贵杰, 苏健勇, 等. 基于正常解耦变换的双三相永磁同步电机缺相容错控制策略[J]. 电工技术学报, 2017, 32(3): 86-96.
ZHOU C P, YANG G J, SU J Y, et al. The Control Strategy for Dual Three-Phase PMSM Based on Normal Decoupling Transformation under Fault Condition Due to Open Phases[J]. Transactions of China Electrotechnical Society, 2017, 32(3): 86-96.
[10] LI X, XIE M, JI M, et al. Restraint of Common-Mode Voltage for PMSM-Inverter Systems With Current Ripple Constraint Based on Voltage-Vector MPC[J]. IEEE Journal of Emerging and Selected Topics in Industrial Electronics, 2023, 4(2): 688-697.
[11] 李耀华, 王孝宇, 刘子焜, 等. 表贴式永磁同步电机多步模型预测电流控制简化策略[J]. 电机与控制学报, 2023, 27(6): 85-95.
LI Y H, WANG X Y, LIU Z K, et al. Simplified Multi-Step Predictive Current Control for Surface Permanent Magnet Synchronous Motor[J]. Electric Machines and Control, 2023, 27(6): 85-95.
[12] GUZMAN H, DURAN M J, BARRERO F, et al. Comparative Study of Predictive and Resonant Controllers in Fault-Tolerant Five-Phase Induction Motor Drives[J]. IEEE Transactions on Industrial Electronics, 2015, 1(63): 606-617.
[13] LUO Y X, LIU C H. Pre- and Post-Fault Tolerant Operation of a Six-Phase PMSM Motor using FCS-MPC without Controller Reconfiguration[J]. IEEE Transactions on Vehicular Technology, 2019, 68(1): 254-263.
[14] GONCALVES P F C, CRUZ S M A, MENDES A M S. Fault-Tolerant Predictive Current Control of Six-Phase PMSMs with Minimal Reconfiguration Requirements[J] IEEE Journal of Emerging and Selected Topics in Power Electronics, 2023, 11(2): 2084-2093.
[15] ABURUB H, IQBAL A, GUZINSKI J. High Performance Control of AC Drives with MATLAB/Simulink Models[M]. Chichester, West Sussex: Wiley, 2012: 372-373.
[16] 孟超. 双三相永磁同步电机驱动系统的研究[D]. 长沙: 湖南大学, 2013: 25-28.
MENG C. Research on Driving System of Double Three-Phase Permanent Magnet Synchronous Motor[D]. Changsha: Hunan University, 2013: 25-28.
[17] 张晓光. 永磁同步电机模型预测控制[M]. 北京: 机械工业出版社, 2022: 15-17.
ZHANG X G. Model Predictive Control of Permanent Magnet Synchronous Motor[M]. Beijing: China Machine Press, 2022: 15-17.
[18] WANG X Q, WANG Z G, CHENG M, et al. Remedial Strategies of T-NPC Three-Level Asymmetric Six-Phase PMSM Drives Based on SVM-DTC[J]. IEEE Transactions on Industrial Electronics, 2017, 64(9): 6841-6853.
Single-phase Open Fault-tolerant MPC Control for Six-phase PMSM in Different Coordinate Systems
YUAN Kai1, JIANG Yunhao1, YUAN Lei1*, GUO Yong2, DING Yidan1
(1. Hubei Collaborative Innovation Center for High-efficiency Utilization of Solar Energy, Hubei University of Technology, Wuhan 430068, China; 2.91184 Troop Ship Support Office,Qingdao 266071, China)
At present, the model predictive fault-tolerant control of single-phase open fault of six-phase permanent magnet synchronous motor has gradually become a hot topic. The work aims to comparatively analyze the fault mechanism underandcoordinate system control and compare the control effect of normal and fault-tolerant operating models in different coordinate systems. Based on the vector space decoupling coordinate transformation matrix invariant principle, the A-phase open fault model was theoretically calculated and analyzed, and the model predictive control fault-tolerant modeling was carried out in two different coordinate systems,andrespectively. Finally, in MATLAB/Simulink, the same motor parameters were used for real-time simulation of the normal operation and fault-tolerant operation of the motor in the two coordinate systems. The simulation results showed that under normal operation, the THD was 2.09% and 2.77% respectively. In fault operation, the THD incoordinate systemwas 13.15% smaller than that incoordinate system. In fault-tolerant operation, THD was 1.19% and 1.79% respectively in the two coordinate systems. It can be seen from the simulation results that the motor controlled bycoordinate system has more stable performance when fault occurs, and the control effect under normal and fault-tolerant operation conditions is almost equivalent.
six-phase permanent magnet synchronous motor; model predictive current; vector space decouples; open fault analysis; fault-tolerant control
TB486.3
A
1001-3563(2024)03-0165-11
10.19554/j.cnki.1001-3563.2024.03.019
2023-10-23
国家自然科学基金(5200070339);电磁能技术全国重点实验室资助课题(6142217210301);湖北省教育厅科学技术研究计划重点项目(D20221401)
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
建材发展导向(2021年7期)2021-07-16
防爆电机(2020年6期)2020-12-14
青年歌声(2019年2期)2019-02-21
知识经济·中国直销(2017年11期)2017-11-28
中国公路(2017年16期)2017-10-14
光学精密工程(2016年3期)2016-11-07
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
