
双馈风电系统低压穿越期间的参数辨识方法研究
2024-02-27 02:28刘育明陈朝阳李小菊李登峰
电工电能新技术 2024年2期
方 欣, 姚 骏, 刘育明, 陈朝阳, 李小菊, 李登峰
(1. 输变电装备技术全国重点实验室(重庆大学), 重庆 400044; 2. 国网重庆市电力公司电力科学研究院, 重庆 401123)
1 引言
随着风电的快速发展,风电机组并网对电力系统安全稳定运行的影响越来越突出[1]。为保证低电压穿越(Low Voltage Ride Through,LVRT)期间风电机组的可靠运行[2],需要进行相关的稳定性分析与计算,而建立准确的风电机组模型是其中的关键。双馈感应发电机(Double Fed Induction Generator,DFIG)作为最常见的风电机型之一[3],已有许多文献研究了与其相关的建模方法。如文献[4,5]忽略电流控制过程,分别建立了直流电压和转子转速时间尺度下DFIG风电系统的幅相动力学模型,文献[6]计及转子侧控制回路的影响,建立了用于电网浅度故障下暂态特性分析的DFIG风电系统模型。文献[7]基于阻抗分析法,建立了DFIG风电系统和电网的等效阻抗模型,用于分析风电并网系统和电网的交互作用。然而上述研究大多针对不同的问题,在某一特定情景下建模,进行了简化或抽象,便于分析问题但同时也降低了模型的准确度。并且,当电网发生短路故障时,DFIG风电系统表现出序贯控制特性[8],即在不同短路故障深度下,控制系统的控制目标、控制结构、控制参数和控制指令会发生改变,进而影响系统的动态响应。因此本文将进一步探讨。因此现有研究缺少对计及序贯控制特性的DFIG风电系统精细化建模方法的深入研究。
在模型参数选定方面,由于运行环境改变或控制器黑箱等原因,风电机组变流器的控制结构及其参数通常难以获取,需要结合参数辨识方法估计模型中的未知环节。参数辨识法分为经典辨识法和现代辨识法[9]。其中,经典辨识法包括最小二乘法[10,11]、理论解析法[12-14]、频域分析法[15]等。经典辨识法一般适用于线性系统的辨识,难以应用于非线性系统的辨识。为解决该问题,有文献提出了现代辨识方法,利用人工智能算法进行参数辨识[16,17]。现代辨识法求解能力强,且不受非线性环节的约束,因此,更适用于双馈风电系统这种变量维度高、强耦合、高度非线性化系统。文献[18]根据无刷双馈电机的数学模型建立等效的多层神经网络,基于反向传播算法进行电机参数辨识,文献[19]提出了一种永磁同步电机驱动系统的参数估计方法,基于改进的粒子群算法对永磁同步电机驱动系统的参数估计模型进行求解。文献[20]结合解析法和现代辨识法对风电场等值机组的参数进行辨识,然而该文献没有考虑LVRT期间系统的序贯控制特性。文献[21]利用自适应惯性权重粒子群优化算法,结合实测数据对光伏并网系统低电压穿越控制参数予以辨识,但是仅辨识了有功恢复速率和无功电流支撑系数,没有涉及其余控制器参数。因此现有研究大多旨在辨识电机参数或少量控制参数,缺少对控制系统全局参数辨识的深入研究。
基于以上对DFIG精细化建模的研究可以发现,模型的准确性取决于模型结构的准确性和模型参数的准确性。大部分文献都针对机械参数辨识和测量方法研究,而忽略控制参数的作用。因此本文主要关注控制参数的辨识。在模型结构较准确的前提下辨识模型参数,使得所建立模型的参数逼近实际系统的参数,可以提高模型的准确性。
为进一步提高风电系统输出特性辨识的准确性,本文提出一种双馈风电系统的全局参数辨识方法,该方法计及LVRT期间的序贯控制特性,建立DFIG的详细数学模型,并提出多工况-分步辨识策略,对全局控制参数进行辨识。最后,通过多种短路故障情况下仿真模型和实测数据的波形对比结果以及模型验证结果证明所提方案的有效性。
2 LVRT期间双馈风电系统的序贯控制特性及精细化建模
2.1 LVRT期间双馈风电系统序贯控制特性
图1为我国现有风电并网系统LVRT要求。根据电网导则,在LVRT期间双馈风电系统动态响应分为三个阶段。阶段I为故障初始阶段,DFIG风电系统封锁转子侧变换器(Rotor Side Converter,RSC)并投入Crowbar电路[22];阶段II为故障持续阶段,风电系统根据图1(b)输出无功电流,同时,RSC控制系统由功率环-转子电流环级联控制切换至电流环控制,此时各控制器的控制参数发生相应改变;阶段III为故障清除阶段,风电系统按一定速率恢复有功功率输出,待有功功率爬坡至故障前稳态值附近时再切换为最大功率追踪控制,RSC控制系统切换为级联控制结构,各控制器参数恢复正常值。
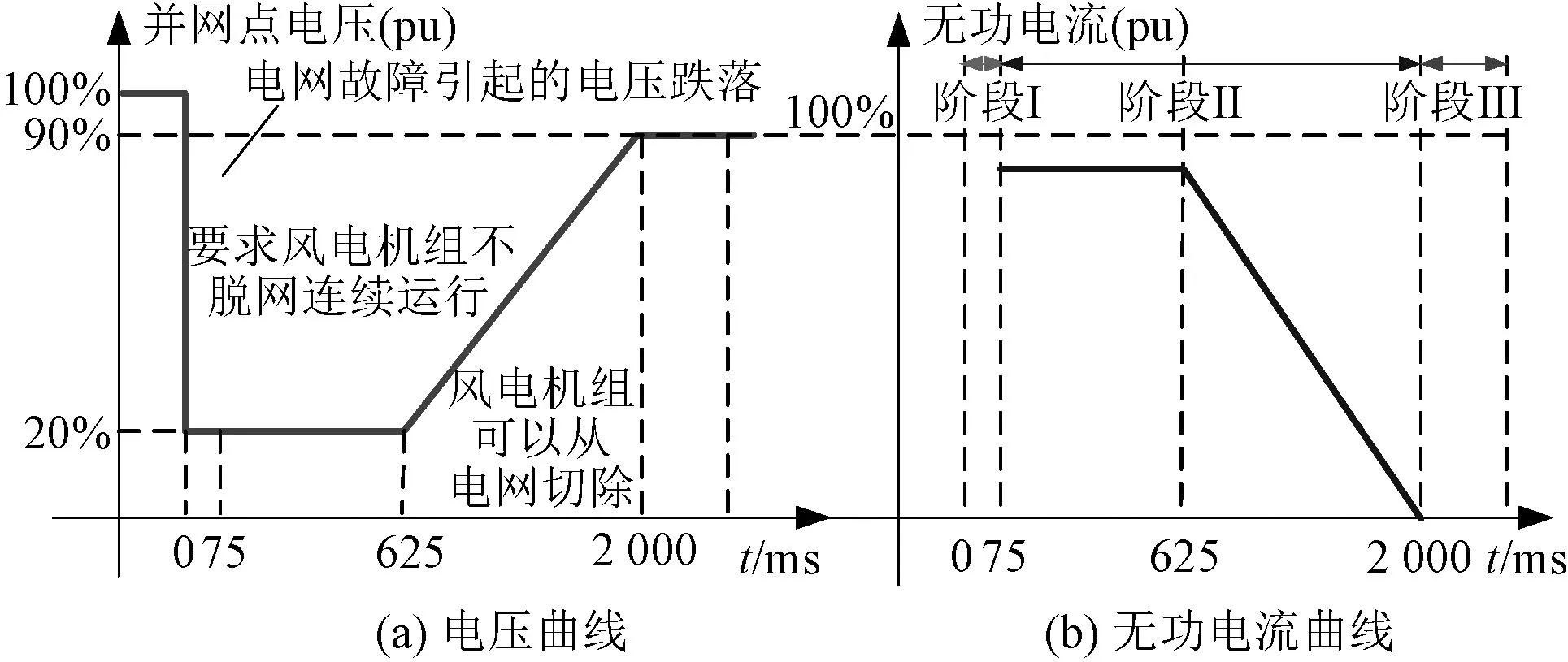
图1 低电压穿越要求Fig.1 Requirements of LVRT
在LVRT不同阶段,控制系统的控制目标不同,因此控制结构、控制参数和控制指令会发生相应改变,表现出序贯控制特性。另外,由于Crowbar电路无法在故障发生/结束时刻瞬时投入,而是经过短暂的延时之后才动作,此时,序贯控制特性将会变得更加复杂,其控制切换时序如图2所示。

图2 LVRT期间的序贯控制时序Fig.2 Sequential control sequence during LVRT
图2中,Fcro、Firf、Frec、Fnor分别为Crowbar电路投入、转子侧电流环控制、有功恢复控制、正常运行控制的标志位,当标志位置1时,控制系统动作,当标志位置0时,控制系统不动作。ton、toff、tdelay1、tdelay2、tCrowbar1、tCrowbar2、tduration、trecover分别是故障开始/结束时间、故障开始/结束时Crowbar动作延迟时间、故障开始/结束Crowbar投入时间、故障持续时间以及有功恢复时间。根据LVRT期间DFIG风电系统的控制切换时序,可以得到考虑/未考虑Crowbar动作延迟时RSC的序贯控制策略见表1。

表1 LVRT期间RSC序贯控制策略Tab.1 Sequence control strategies of RSC during LVRT
从表1可以看出,是否考虑Crowbar动作延迟会导致LVRT期间DFIG风电系统的序贯控制产生差异,从而影响其动态响应。
2.2 DFIG风电系统模型
图3为典型DFIG风电系统结构图,其控制系统包括RSC控制、网侧变换器(Grid Side Converter,GSC)控制、锁相环(Phase Lock Loop,PLL)控制以及故障检测模块。其中,UG为电网电压;Us为DFIG定子侧端电压;Udc为直流母线电压;IG、Is、Ir、Ig分别为风电机组、DFIG定子侧、RSC、GSC输出的电流;ωr为转子的电角速度;Cf和Lf为滤波电容、电感,Zg为电网阻抗。
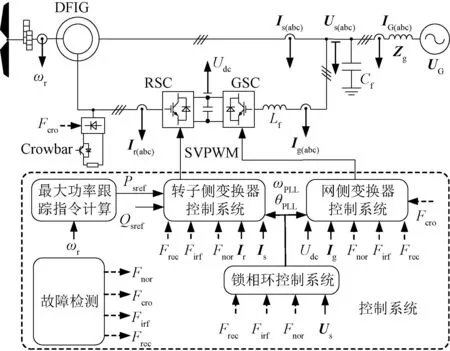
图3 DFIG风电系统结构Fig.3 Structure of DFIG wind power generation system
(1)RSC控制系统
在以电网电压定向的dq同步旋转坐标系下,RSC控制系统如图4所示。正常运行期间,RSC采用双闭环级联控制结构,以实现定子有功功率Ps与无功功率Qs的解耦控制。其中,Frdc为转子侧双闭环级联控制标志位。具体控制方程如式(1)和式(2)所示。上标“—”表示逻辑取反。
(1)
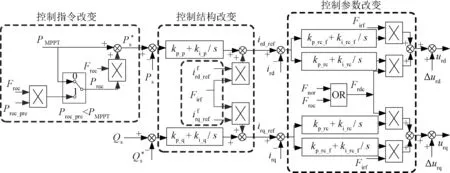
图4 RSC控制框图Fig.4 Block diagram of RSC controller
(2)

(3)

(4)
式中,igd、igq、iGd、iGq、ψsd、ψsq分别为Ig、IG和定子磁链ψs的dq轴分量;Ls为DFIG定子绕组电感;ωPLL为PLL输出角速度。
(5)
式中
(6)
(2)GSC控制系统
GSC控制系统如图5所示。
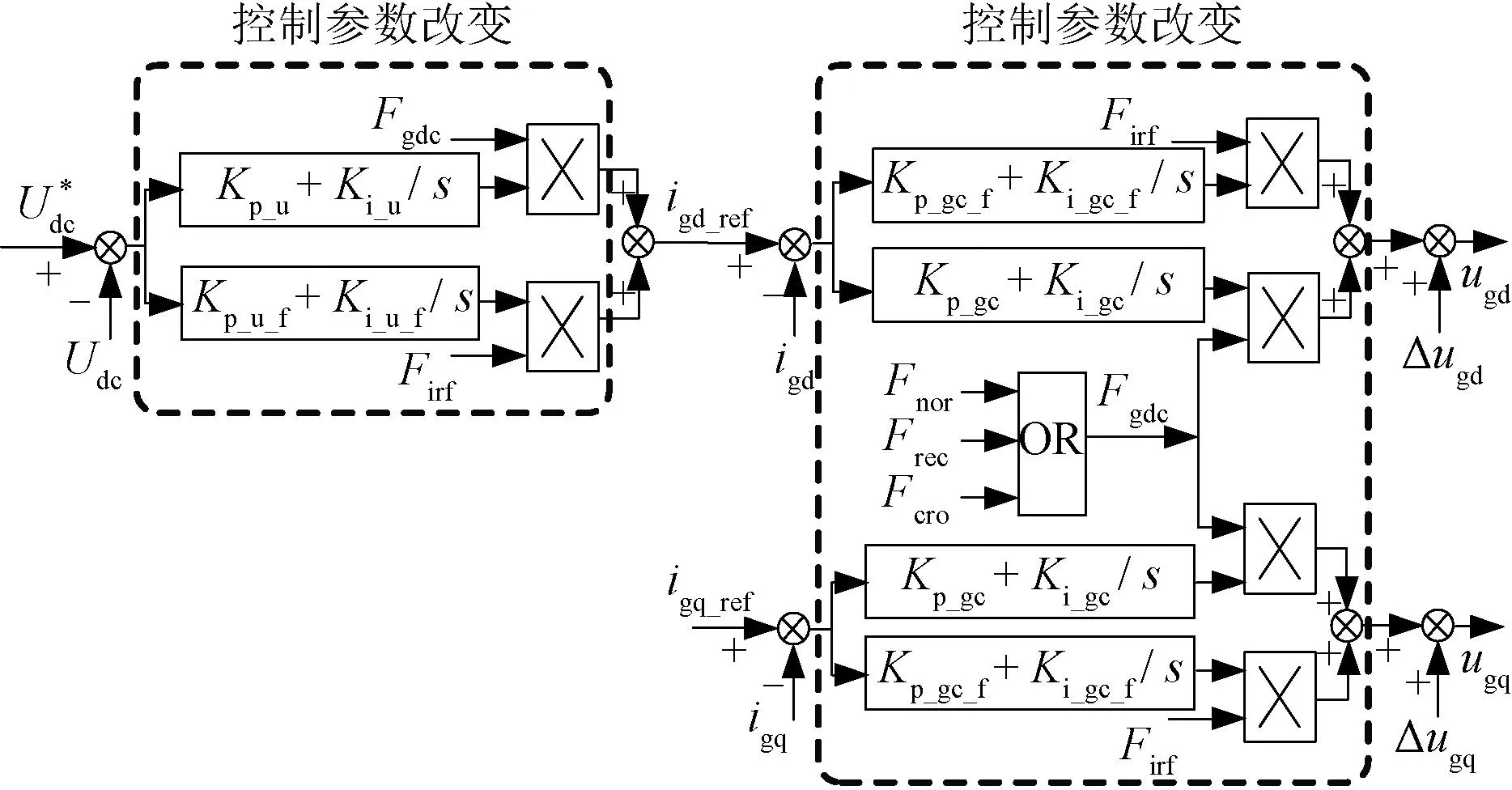
图5 GSC控制框图Fig.5 Block diagram of GSC controller
正常运行期间,GSC控制器主要实现直流母线电压控制和单位功率因数控制,具体控制方程为:
(7)
(8)
在电网故障初始阶段,Fgdc置1,Firf置0,GSC控制系统不变;在电网故障持续阶段,Fgdc置0,Firf置1,GSC控制结构和控制指令不变,控制参数分别切换为kp_gc_f、ki_gc_f、kp_u_f、ki_u_f;在电网故障清除阶段,Fgdc置1,Firf置0,GSC控制系统参数恢复初始值。
(3)PLL控制系统
PLL控制系统如图6所示。

图6 PLL控制框图Fig.6 Block diagram of PLL controller
根据图6,可得PLL数学模型为:
(9)
式中,kp_PLL、ki_PLL分别为锁相环PI控制器的比例、积分系数;θPLL为锁相环输出位置角。
在电网故障初始阶段,Fgdc置1,Firf置0,PLL控制系统不变;在电网故障持续阶段,Fgdc置0,Firf置1,PLL控制结构和控制指令不变,控制参数分别切换为kp_PLL_f、ki_PLL_f;在电网故障清除阶段,Fgdc置1,Firf置0,PLL控制系统参数恢复初始值。
3 DFIG风电系统全局参数辨识
3.1 DFIG风电系统全局参数辨识流程
DFIG风电系统全局参数辨识分为三个阶段,首先建立系统的仿真模型并确定待辨识参数;其次基于轨迹灵敏度分析法计算待辨识参数与输出特性之间的灵敏度大小,选择灵敏度较大的输出特性作为最佳观测量;最后利用优化算法,结合实测数据进行全局控制参数辨识。图7所示为辨识流程图,本文采用粒子群算法作为优化算法,e为观测数据与实测数据的误差。

图7 全局参数辨识流程图Fig.7 Flowchart of LVRT characteristic identification
根据第2节建立的模型,可以得到DFIG待辨识参数见表2,共有32个待辨识参数,其中,RCrowbar和Ron分别为Crowbar电阻和故障电阻。
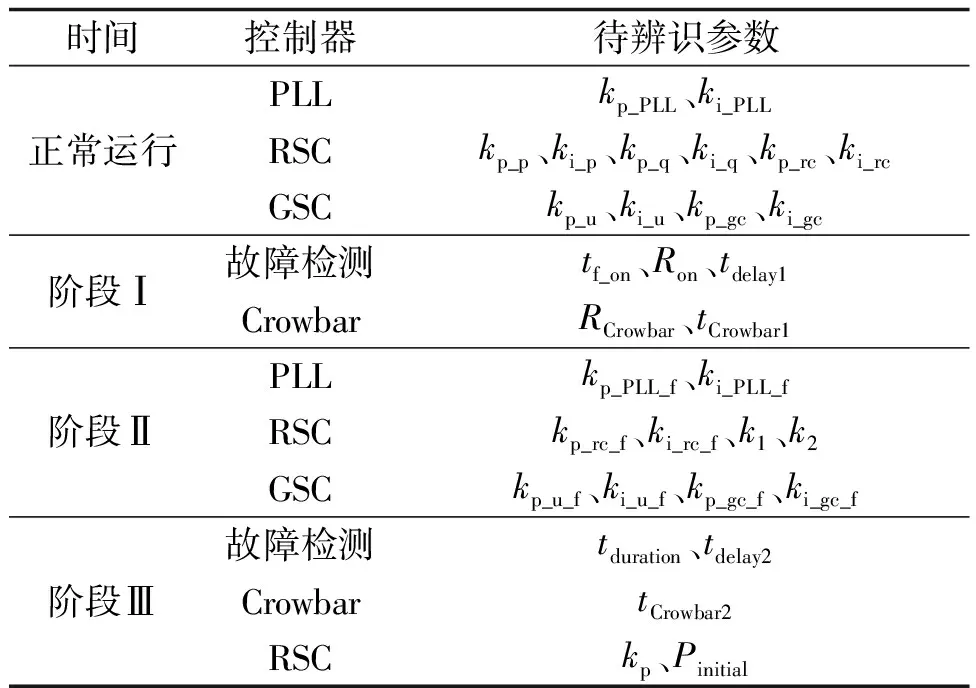
表2 待辨识参数Tab.2 Parameters to be identified
3.2 待辨识参数的轨迹灵敏度分析
由图7可知,在参数辨识之前需要选择观测量作为优化算法中误差计算的数据源,此数据源是影响优化算法寻优效果的重要因素之一,应选择与各参数高度关联的数据。轨迹灵敏度分析法作为一种评估系统参数与系统输出之间关联程度的方法[23],可用于最佳观测量的选择,其计算如下所示:
(10)

初步选取观测量为DFIG输出的有功功率P、无功功率Q、并网点电压幅值U、输出总电流幅值I以及ωr,各观测量对待辨识参数的轨迹灵敏度计算结果如图8所示。P和Q对各参数的灵敏度远高于U、I和ωr,因此选择P、Q作为最佳观测量。

图8 轨迹灵敏度分析结果Fig.8 Trajectory sensitivity analysis results
3.3 DFIG风电系统LVRT特性的多工况-分步辨识策略
考虑到LVRT期间控制系统的序贯控制特性以及参数耦合[24]的影响,本文提出一种多工况-分步辨识策略来提高辨识精度,基本流程描述如下:
(1)利用浅度和深度故障工况的数据进行分步辨识。其中浅度故障工况表示电网电压跌落程度低于10%,不触发系统切换控制策略。深度故障工况表示电网电压跌落深度大于10%,触发系统切换控制策略。由于在浅度故障工况下控制系统不变,因此可利用浅度故障工况辨识正常运行期间的相关控制参数,而利用深度故障工况的数据辨识LVRT期间的相关参数。采集多种工况的数据可获取更多有效信息,进而提高辨识精度,采用分步辨识可降低每次辨识的变量维度,提高优化算法求解精度。
(2)数据分序列辨识。为减小序贯控制特性的影响,按照控制系统切换顺序将观测量数据分成五组序列,在每组数据序列辨识时,仅辨识影响该序列数据的关键参数。
(3)首先分步辨识,将参数分成多组进行辨识,之后整体辨识。为降低参数耦合对辨识结果的影响,在分步辨识之后还需要进行整体辨识,并将分步辨识的结果作为整体辨识中参数的初始值,提高整体辨识的效率。
(4)根据(1)和(2)可得到数据序列分区、参数分组及辨识顺序结果见表3。
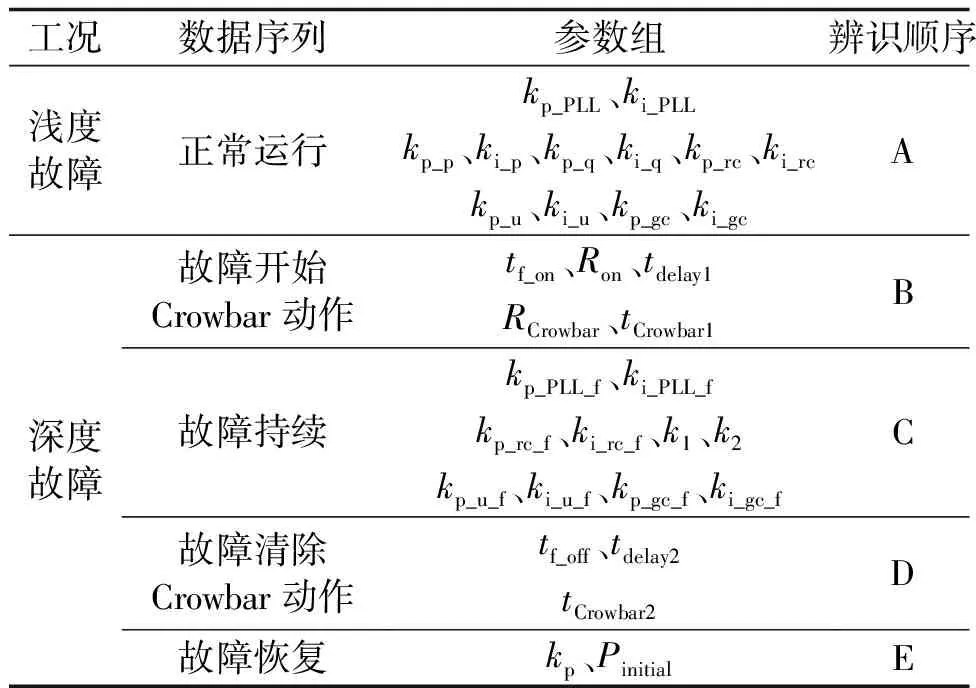
表3 数据序列及参数分组结果Tab.3 Data sequence and parameter grouping results
在每次辨识过程中,需要设置目标函数,并利用优化算法求解参数,本文的目标函数f为所选数据采样窗口内实测数据与观测数据的误差平方和,用于表征实测波形和观测波形之间的误差,假设共有n组观测数据。
(11)

综上所述,多工况-分步辨识策略流程图如图9所示。首先分别利用浅度故障工况和深度故障工况的数据对A~E组参数进行分步辨识,并在每组参数辨识时,代入前组序列的辨识结果,最后将分步辨识结果作为初始值进行整体辨识。
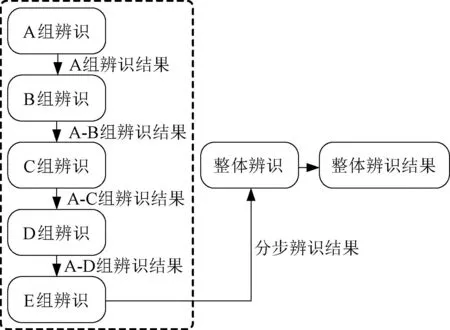
图9 多工况-分步辨识策略Fig.9 Multi-condition-step identification strategy
4 实验-仿真波形对比与模型验证
为验证本文所提出辨识策略的有效性,利用实际系统输出特性与经过全局参数辨识的仿真输出特性对比。因此本文搭建了基于TMS320F28335的实验平台,如图10所示。实验系统的详细参数见表4。DFIG风电系统由直流电动机驱动,用空心电抗器模拟线路阻抗,利用Chroma 61830电网模拟器产生电网的三相故障。同时,按照图4在Matlab/Simulink中建立了仿真模型。

表4 双馈风电系统实验系统参数Tab.4 Parameters of experimental system
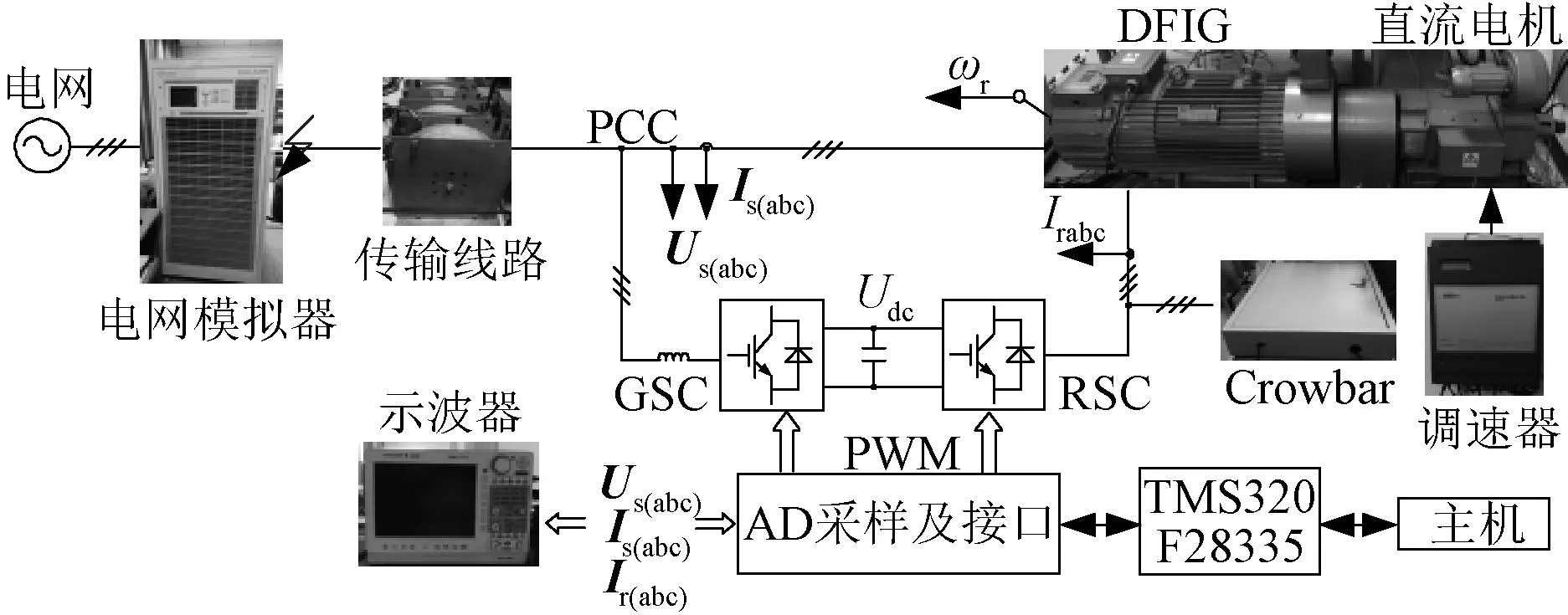
图10 实验系统结构Fig.10 Structure of experimental system
本文在4种故障工况下对所提出的辨识策略进行了验证,分别为:电网电压跌落至90%UN、75%UN、50%UN以及20%UN,UN为电网额定电压,波形对比结果分别如图11~图14所示。从图11~图14中可以看出,在四种故障工况下,仿真模型的输出特性都能够很好地拟合实验波形,且吻合度较好,证明了所提出的辨识策略的有效性。
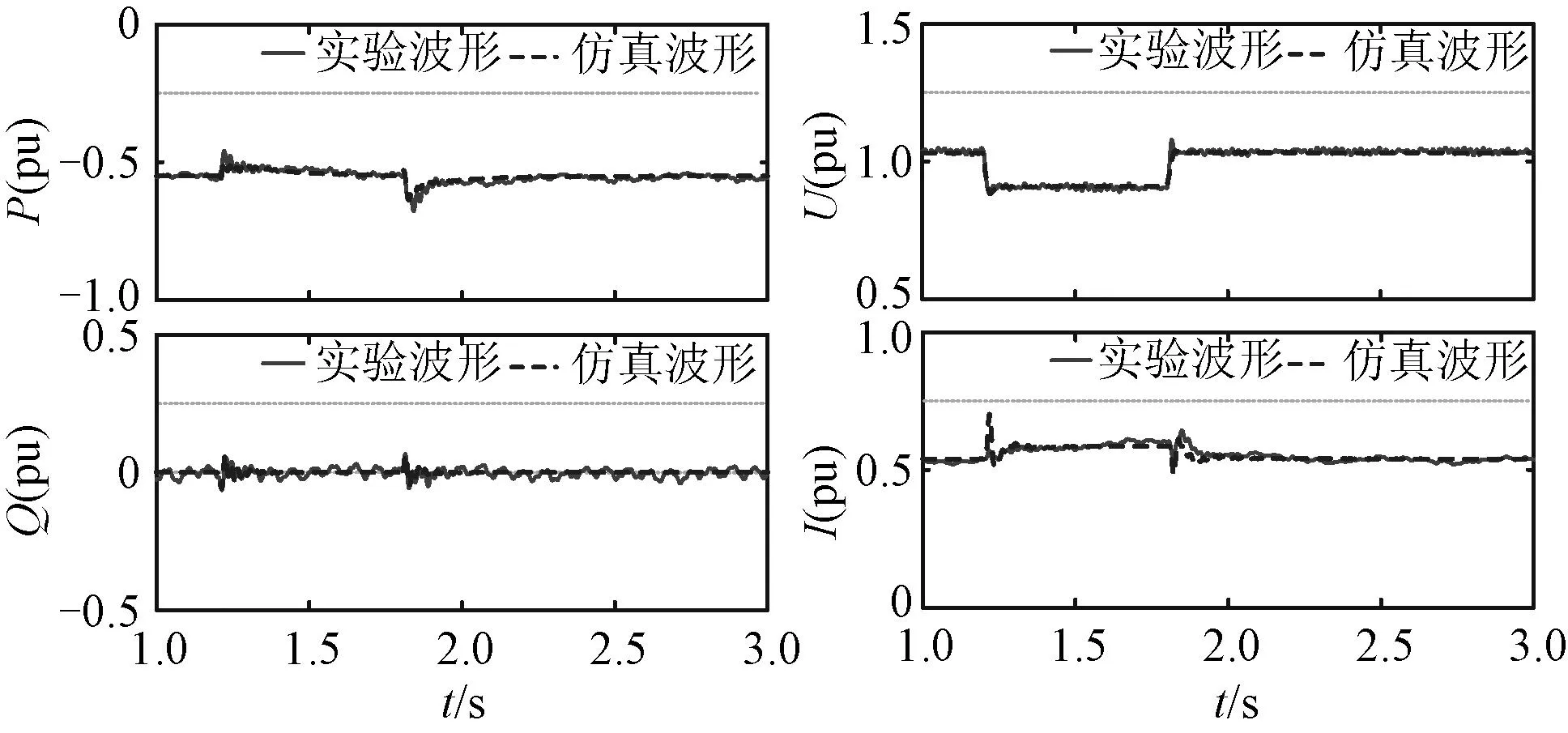
图11 电网电压跌落至90%UN时的波形对比结果Fig.11 Waveform comparison results when grid voltage drops to 90%UN

图12 电网电压跌落至75%UN时的波形对比结果Fig.12 Waveform comparison results when grid voltage drops to 75%UN
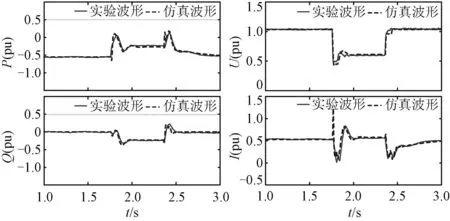
图13 电网电压跌落至50%UN时的波形对比结果Fig.13 Waveform comparison results when grid voltage drops to 50%UN

图14 电网电压跌落至20%UN时的波形对比结果Fig.14 Waveform comparison results when grid voltage drops to 20%UN
同时,为了进一步验证仿真模型的准确度,本文根据NB/T 31053—2014《风电机组低电压穿越建模及验证方法》标准对仿真模型结果进行了验证。
(1)偏差计算方法
通过计算实验系统与仿真模型的P、Q、Iq之间的偏差来考核模型的准确程度。其中,偏差类型包括:平均偏差、平均绝对偏差、最大偏差以及加权平均偏差。根据模型验证标准,LVRT期间DFIG风电系统的输出特性可分为3个时段,分别为故障前a、故障期间b、故障后c。其中,对于各时段输出特性的稳态区间,需要计算稳态平均偏差F1、稳态平均绝对偏差F3和稳态最大偏差F5。对于暂态区间,需要计算暂态平均偏差F2和暂态平均绝对偏差F4。分别按照10%、60%、30%的权重将a、b、c三个时段的F3进行加权平均,得到全时段的加权平均绝对偏差FG,偏差计算方法在附录中给出。
(2)验证结果评价
P、Q、Iq的稳态/暂态平均偏差、稳态/暂态平均绝对偏差、稳态最大偏差以及加权平均绝对偏差应不大于表5中的偏差最大允许值。

表5 偏差最大允许值Tab.5 Maximum allowable value of deviation
(3)模型验证结果
表6~表9分别给出了4种短路故障工况下的模型验证结果。表10~表11给出了不同故障工况下的模型验证结果。可以看出所有偏差均低于最大允许值,且全时段的加权平均偏差均小于5%,模型验证满足辨识精度要求,证明了本文所提辨识策略的有效性。

表6 电网电压跌落至90%UN时的模型验证结果Tab.6 Model validation results when grid voltage drops to 90%UN

表7 电网电压跌落至75%UN时的模型验证结果Tab.7 Model validation results when grid voltage drops to 75%UN

表8 电网电压跌落至50%UN时的模型验证结果Tab.8 Model validation results when grid voltage drops to 50%UN

表9 电网电压跌落至20%UN时的模型验证结果Tab.9 Model validation results when grid voltage drops to 20%UN
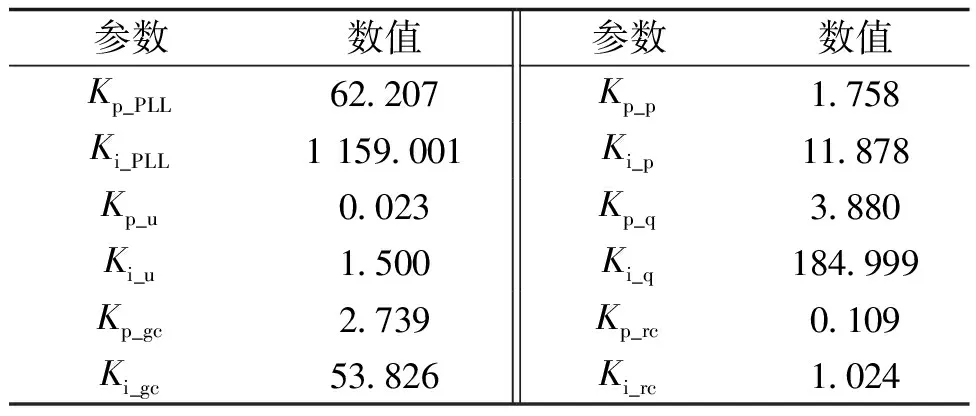
表10 电网正常期间的控制参数辨识结果Tab.10 Model identification results when grid voltage is normal
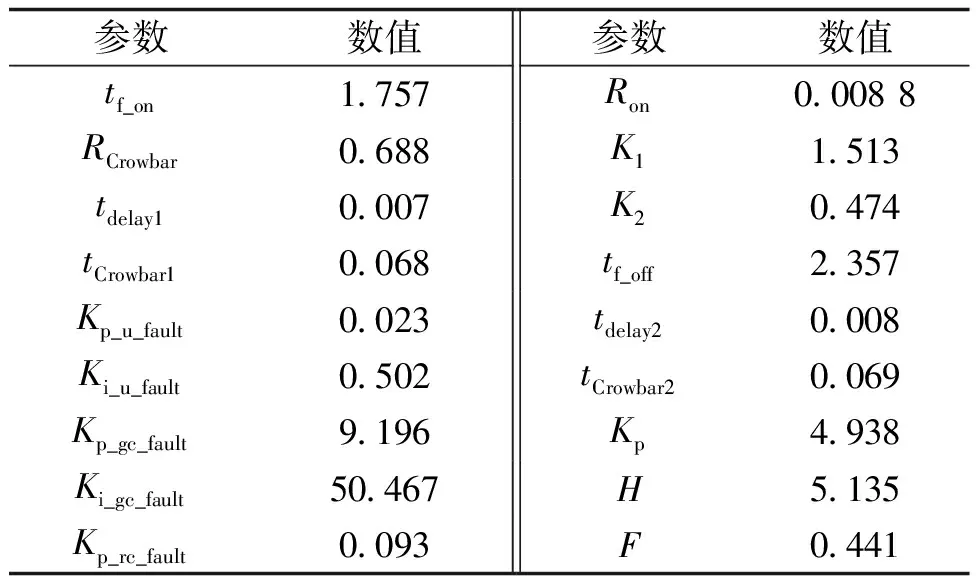
表11 电网电压跌落至50%UN时的控制参数辨识结果Tab.11 Model identification results when grid voltage drops to 50%UN
5 结论
本文针对双馈风电系统的全局参数辨识问题,首先建立了计及序贯控制特性的DFIG精细化模型;其次将DFIG全局控制参数作为待辨识参数,基于轨迹灵敏度分析法选取了最佳观测量;最后进一步提出了多工况-分步辨识策略,并进行了波形对比和模型验证,得到主要结论如下:
(1)通过引入多个标志位信号并进行相应的逻辑运算,使得所建立的DFIG风电系统模型表现出序贯控制特性。
(2)相比于电压、电流和转速特性,DFIG风电系统输出的有功功率和无功功率对待辨识参数更加敏感,更适合作为观测量。
(3)在双馈风电系统的全局参数辨识过程中存在待辨识参数数量众多、数据信息有限、待辨识对象动态变化以及参数耦合等难点。本文针对这些难点提出了多工况-分步辨识策略,该策略采用了多工况辨识、数据分序列辨识、先分步后整体辨识几种策略。在所提出的辨识方案下,仿真模型与实验系统的输出特性能够准确拟合,并达到了模型验证的精度要求。
附录
分别用XS和XM表示电气量的仿真数据和实验数据基波正序分量的标幺值。用KStart和KEnd表示第一个和最后一个仿真、实验数据的序号,各偏差具体计算方法如下:
F5=maxi=KStart,…,KEnd(|XM(i)-XS(i)|)
猜你喜欢
大电机技术(2022年3期)2022-08-06
飞控与探测(2022年6期)2022-03-20
防爆电机(2021年6期)2022-01-17
力学学报(2020年4期)2020-08-11
能源(2018年6期)2018-08-01
能源(2018年6期)2018-08-01
能源(2018年8期)2018-01-15
黑龙江电力(2017年1期)2017-05-17
风能(2016年12期)2016-02-25
电测与仪表(2015年16期)2015-04-12
