无人机辅助技术在防洪工程控制网测量中的应用
2024-02-27 03:12关健
黑龙江水利科技 2024年1期
关 健
(抚顺市水利勘测设计研究院有限公司,辽宁 抚顺 113008)
水利工程建设涉及到管线、地形、水下和地上建筑物等方面的测量作业,需要综合考虑不同构筑物的结构特点以及地形环境,这使得工程测量相对复杂,需要进行全面的测绘工作。然而,传统的人工测量方法在宏观性和效率方面存在一定的不足,一般需要投入大量的人力和时间成本,并且可能受到人为误差的影响。此外,控制点的选择难度较大,而且对于复杂的地形条件更具挑战。无人机在测绘领域具有很高的效率和灵活性,可以快速获取大量测量数据,并且能够覆盖复杂地形地貌,但无人机测绘也存在一些限制,如后期数据处理量较大,需要专业的处理软件和技术人员,另外还会受到气候条件和航空管制的限制。无人机测绘还需要先进的设备和训练有素的操作人员[1-3]。所以,为了在保证测量成果精度的同时提高效率并解决测量难题,可以考虑利用无人机辅助技术来布设人工测绘控制网。
1 工程概况
抚顺市望花区古城子河防洪工程是一个兼具生态修复和防洪功能的综合项目,护岸全长7.036km。然而,该区域限飞高度为30m,并且被划定为飞行管制区,这意味着单单使用无人机是难以实现对整个项目区域进行全景航测。文章利用无人机辅助技术对抚顺市望花区古城子河防洪项目区进行控制点位选择和控制网布设,可以克服人工测绘中的一些问题,实现测绘工作的优化调整,这样可以提高测绘效率、精度以及宏观性,为工程项目的规划和设计提供准确可靠的数据支持。
2 研究方法
2.1 技术手段
古城子河流域属寒温带季风大陆性气候,冬季严寒漫长,多为西北风,夏季炎热多雨,春季干旱多风沙,所以主要分析定点悬停、长续航、防水、抗风等因素合理选择无人机航测设备。研究选用四轴多旋翼大疆无人机,该航测无人机能够在5级大风中定点维持稳定悬停,能够达到10km测控要求,全面覆盖望花区古城子河防洪项目测控区域。航测无人机搭载的2 450万有效像素能够在限高30m飞行条件下,实现带状测绘区数据采集;传统的全站仪和GNSS接收机等测绘设备,在测绘和工程领域中发挥着着重要的作用,其主要参数如表1所示。其中,全站仪是一种多功能的测量仪器,可以进行角度和距离的测量。它结合了光学仪器和电子距离测量仪的功能,能够快速、准确地测量目标点的位置。GNSS接收机是一种全球卫星导航系统接收设备,用于获取卫星导航信号并确定地球上的位置。
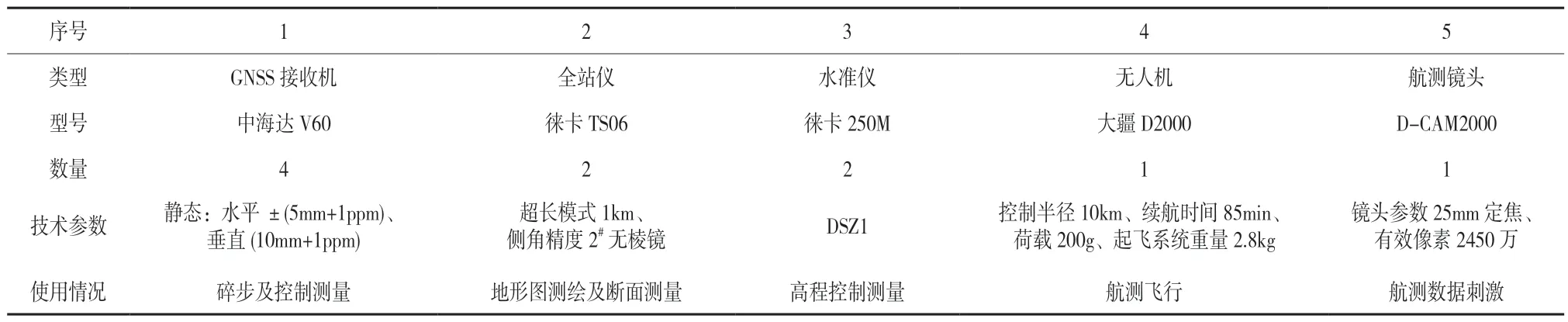
表1 设备技术参数
为更好地完成业内数据处理任务以及配合外业测量控制网布设要求,考虑选用表2种的软件完成测绘图形校准、选点、编辑、平差和建模等工作。

表2 系统软件应用情况
2.2 控制点的选择
项目区空气湿润和较高的折射率会对测绘工作产生一定影响,即空气湿润会导致光线的折射率发生变化,从而对测量数据精度产生影响。同时,较高折射率的环境会使光线更容易发生折射,需要在测绘过程中进行相应的校正操作。此外,项目区地形成南北低、中部高的特点也会对测绘工作带来挑战,传统测绘方法在长轴方向上,随着单元测量误差的累计测绘误差会逐渐增大,这种单向误差的增大会导致测绘域布局发生扭曲,使测绘结果准确性受到影响。为了解决这些问题,可以采用微分测绘域的方法,通过将大范围的测量区域划分为若干个小的子区域,减小单向误差的累积效应,并且提高测绘的精度。在每个子区域内独立进行测绘以更好地控制测量误差,并通过控制点或连接点的设置来保证各个子区域之间的连接和一致性,如图1所示。

图1 测绘域的微分处理
当像元中心点和εx不变而εy逐渐增大时会导致该空间区域出现扭曲,为实现测绘点位的修复与校准有必要建立空间坐标定位控制网[4]。在古城子河防洪工程中使用大疆无人机辅助控制点的选择和布设,并利用Smart 3D软件对航测影像进行点云投影,生成实景模型带。
在控制点的选择和布设方面,研究选取高程与平面共用的标石,并在水泥路面上刻制了方框作为控制点,方框尺寸为3mm×20cm×20cm,方框内部使用红漆标注,以便于寻找和定位。通过V60 GNSS接收机和无人机进行平面控制网的静态观测及测量,并根据要求进行高程控制测量,以确保测量的规范性。针对高程控制网选用附合与闭合路线构成的水准路线网,以确保平差计算的准确性,具体的相关要求可参考表3。

表3 无人机取样点及四等水准测量要求
2.3 控制网数据处理
研究采用CGCS2000坐标系,高程投影面为0,该项目主要坐标系选取统一坐标,高程系统等间距0.5m,以古城子河为基准高程[8]。文章选择抚顺市国土资源局复测的D级、E级控制网成果为平面起算点,由于二等、三等水准网成果经过测绘部门的验收,故选取该成果作为高程起算点可以确保其精度和可靠性,具体如表4所示。

表4 D级和高程控制点起算坐标
3 控制网精度及平差计算
3.1 平面控制网分析
通过中海达HGO 2.0软件的基线处理和相关计算,以及对数据的检查和评估,可以确保控制网的精度和可靠性达到设计要求。经基线处理生成70个同步环和25个异步环,这些环路的形成和闭合差的符合要求,进一步验证了数据的可靠性和准确性。针对三维无约束平差,其绝对值都符合V△Z≤3σ、V△Y≤3σ、V△X≤3σ要求[9],其中V表示绝对值,σ表示对应基线改正数的标准差,这表明基线处理结果的精度满足要求,并且基线测量数据的误差控制得较好。最后,通过对最弱点和最弱变数据进行分析,可以针对性地进行校正和改进,提高整个控制网的精度和准确性,如表5所示。

表5 三维无约束四等网平差表
通过二维约束平差计算,对起算点ZS17、22GE68和22GE31的兼容性进行检验。结果表明,这些抽样点的精度较高,并且能够满足平差约束点的计算要求。经二维约束平差计算,确定最弱变Ⅳ01~Ⅳ03相对中误差1:120 418以及最弱点位中误差的最大值2.91mm,说明最弱变中的误差相对较小,相对于基线长度而言误差的比例符合了1/40 000精度要求[5-7]。
3.2 高程控制网
采用KS地面控制测量数据处理系统进行高程数据的测量和平差计算,得出的高程数据精度符合规范要求,具体过程可概括如下:先根据4等水准观测法测定高程控制网,得到20个测点的高程数据。然后通过KS地面控制测量数据处理系统进行高程数据的平差计算,得到高程控制网的平差值,根据水准线路20.46km、20个测段点数和高程数据的平差值确定高程值,并计算平均、最长和最短测算长度1.02km、8.10km和0.08km。先验、后验单位的中误差分别为5.00mm和17.12mm,以中误差17.12mm作为评定精度[8-9]。另外,最弱点高程和最弱测段的中误差分别为17.28mm、17.00mm,高程控制网高程闭合差9mm符合±90.46mm的规范要求,最弱点高程中误差17.28mm符合±25mm的规范要求。经统计分析,高程测量各项精度指标均符合三、四等水准测量规范要求。
3.3 高程点外业和控制点边长检查
结合同精度外业高程检测结果确定检测点之间的高差值均符合±30iL1/2精度要求,测量结果符合规范要求,计算可靠,并且复测闭合路线高程闭合差发现结果合格,高程点外业检测和复测成果如表6所示。

表6 高程控制点与闭合差复测成果
采用Random函数随机抽样检查项目现场各控制点边长,检查精度如表7所示,结果发现现场各控制点均满足1/40 000的控制要求。

表7 控制点边长抽样检查精度
3.4 控制点拟合分析
研究使用Matlab回归计算工具箱来进一步检验控制点布设方法的适用性与可靠性,并通过回归计算建立了适当的模型来拟合平面和立面上的控制点数据。结果显示,控制点位的高程数据经过多次校准后与立面上的精度数据非常接近,可信度较高。虽然平面和立面上的精度数据有些差异,但最大误差(10cm)仍然在可接受范围内,达到精度要求。误差沿东西向分布,这可能是由于东西向的轴距较短,导致误差稍微增加。然而,由于误差较小,研究未集中修正东西向误差,因此控制点位的精度仍然符合实际情况。
4 结 论
根据前文分析结果,在边长及野外检查、高程和平面控制网布设等多个方面,研究利用无人机辅助水利工程测量控制网布设均符合精度要求。无人机在布设控制点位方面的应用能够大幅度提高选取效率,并具有较高的精度。为确保无人机测绘数据的准确性,需要进行多次校准和验证,以保证控制点位数据与立面上精度数据的一致性及高精度;经多次校准后的控制点位数据与平面上控制点位精度有所差异,但误差最大值不超过10cm,能够达到精度要求,研究所用控制点布设方法的研究意义和实用效果较好。
猜你喜欢
当代陕西(2020年23期)2021-01-07
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
北京航空航天大学学报(2017年4期)2017-11-23
中国公共安全(2017年7期)2017-10-13
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
电子制作(2017年9期)2017-04-17
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28