双IRS辅助大规模MIMO系统中基于双时间尺度的信道估计方案
2024-03-07 13:05魏浩章
信号处理 2024年2期
梁 彦 魏浩章 李 飞
(南京邮电大学通信与信息工程学院,江苏南京 210003)
1 引言
智能反射面(Intelligent Reflecting Surface,IRS)近来已成为实现无线通信智能可重构环境的创新性解决方案[1-2]。IRS 由大量具有超低功耗的无源反射元件组成,各无源反射元件能够以可编程的方式控制入射信号的反射振幅和相位,从而协同重塑无线传播信道,有利于信号的传输[3]。因此,IRS提供了一种有效地对抗无线信道衰落和同信道干扰的新方法。此外,由于其重量轻且不使用射频(Radio Frequency,RF)链,大型IRS 可以密集地部署在各种无线通信系统中,以低硬件成本和可持续的能源效应来提高无线通信系统的性能[4-5]。为了保障有效的波束成形与IRS 反射相移优化,实现高速率和超可靠的通信,IRS 辅助通信环境的准确信道状态信息(Channel State Information,CSI)的获取至关重要。然而,由于无源IRS 元件没有收发信号以及信号处理的能力,使得IRS 辅助通信的信道估计成为一项具有挑战性的任务。特别是对于IRS辅助的大规模多入多出(Multiple-Input Multiple-Output,MIMO)系统,由于大规模天线和大量的IRS 元件数量,使信道估计的复杂度和所需导频开销成倍增加[6-7]。因此,无线通信领域的研究人员致力于为不同的IRS 架构设计高效的信道估计方案,旨在以较低的导频开销实现较高的信道估计精度[8-9]。
为减少导频开销,文献[10]提出了一种用于IRS 辅助无线通信系统的双时间尺度信道估计框架。该框架的关键思想是利用信道的双时间尺度特性,即基站(Base Station,BS)-IRS 信道是高维且准静态的,而IRS-用户设备(User Equipment,UE)信道和BS-UE 信道是低维且时变的。对于准静态的BS-IRS 信道,不需要频繁进行信道估计,因此可以从长期角度减少平均导频开销。由于UE 的位置不确定性以及移动性,需要频繁地估计IRS-UE 和BS-UE 信道,但它们的维度小于级联信道维度,因此从整体考虑,基于双时间尺度的信道估计可以显著减少导频开销。
现有的关于IRS辅助通信系统中信道估计的研究大多以单个IRS辅助的无线通信系统为背景。在多个IRS 辅助通信系统的信道估计研究中,则通常忽略掉多个IRS 之间的反射信道[11-12]。最近,在双IRS 辅助通信系统的研究中发现,在IRS 之间的信道上进行协作无源波束形成具有巨大的潜力,该系统能够提供远大于单IRS辅助通信系统的无源波束形成增益[13-14]。尽管无源波束成形增益更为显著,但是双IRS辅助通信系统的结构给信道估计带来了更加复杂的挑战[15-16]。
文献[14]研究了双IRS 辅助单输入单输出(Single-Input Single-Output,SISO)系统中的信道估计问题,将IRS 间信道假定为视距(Line of Sight,LoS)无线传输信道,通过估计级联信道的两个特征向量来获取整个级联信道的CSI。文献[17]提出了一种基于开关训练反射模式的信道估计方案,以获取双IRS 辅助多用户多入单出(Multiple-Input Single-Output,MISO)系统中单反射链路和双反射链路的级联CSI。为了克服[17]中由于开关反射控制引起的误差传播问题和反射功率损失,文献[18]提出了一种具有全开训练反射的有效信道估计方案,以联合估计单反射链路和双反射链路的级联CSI。文献[17]和[18]中提出的信道估计方案通过利用反射信道以及多用户信道之间的内在关系,实现了较低的训练开销,但未考虑BS-IRS信道的准静态特性,导频开销仍有进一步下降的空间。
本文针对双IRS 协同辅助的大规模MIMO 通信系统,提出一种基于双时间尺度的信道估计方案。对于准静态信道,在第一阶段,由BS 传输导频并接收由IRS 反射的导频,基于坐标下降算法估计BS-IRS 信道;在第二阶段,BS 发送导频经由双IRS多路径反射后,再由BS 接收,对接收信号进行重构并使用最小二乘法估计IRS-IRS信道。对于时变信道,利用准静态信道的估计结果基于最小二乘法进一步估计IRS-UE 信道。该方案在估计精度上具有较好的表现,且由于准静态信道估计频率较低,所以在长期角度上,可以明显降低导频开销。
2 系统模型
考虑双IRS 协同辅助的多用户MIMO 通信系统,即两个IRS协同辅助一个天线个数为M的BS与K个单天线用户之间的通信,系统模型如图1 所示。基站与用户之间的直接信道被障碍物遮挡,为了绕过障碍物并最小化路径损失,IRS1和IRS2分别被放置在用户集群和BS 附近,使得BS 可以利用这两个IRS创建的单反射链路和双反射链路有效地服务于K个用户。设N为两个IRS 的子表面总个数,其中IRS1和IRS2分别包括N1和N2个子表面,满足N1+N2=N。通过采用文献[17]、[18]中的元素分组策略,每个IRS 子表面由任意数量的相邻反射元件组成,这些反射元件共享一个共同的相移,以降低信道估计和反射设计的复杂性。
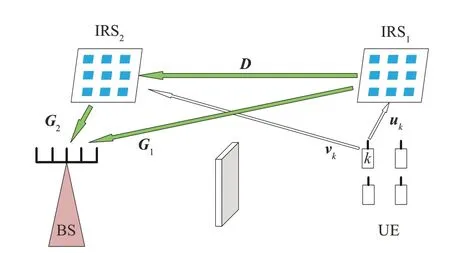
图1 双IRS辅助的多用户MIMO通信系统模型Fig.1 Communication system model of multi-user MIMO assisted by double IRSs
其中,μ∊{1,2},IRSμ的反射振幅和相移分别为βμ,m=1,ϕμ,m∊[0,2π)。
因此,从UEk到BS的信道可表示为:
其中,G2diag(θ2)vk和G1diag(θ1)uk分别是UEk-IRS1-BS 以及UEk-IRS2-BS 的两条单反射链路,G2diag(θ2)Ddiag(θ1)uk是UEk-IRS1-IRS2-BS 的双反射链路。设UEk发送的信号为xk,则BS接收到的信号为:
其中,n~CN(0,ΙM)表示加性高斯噪声,σn2为噪声的功率。
3 基于双时间尺度的信道估计方案
本节针对双IRS 协同辅助的多用户的MIMO通信系统提出一种基于双时间尺度的信道估计方案。由于BS 与IRS 之间以及两个IRS 之间的位置相对固定,构成准静态信道,因此只需要在一个较大的时间尺度上估计Gλ和D,即在相对较长的一段时间内对Gλ和D进行一次估计,其中λ∊{1,2}。而由于用户终端具有移动性,UEk-IRS 的信道uk和vk是时变的,需要在较小的时间尺度上进行估计。因此,信号传输的帧结构设计如图2所示。
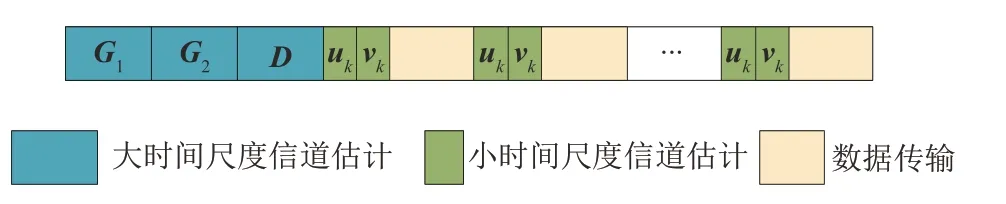
图2 双IRS辅助多用户MIMO通信系统的信号传输帧结构Fig.2 Framework of signal transmission in multi-user MIMO assisted by double IRSs
3.1 大时间尺度信道估计
在大时间尺度的信道估计过程中,由于IRS 不具备有源收发器,因此IRS 既不能发射导频也不能接收导频,从而增加了信道估计的难度。为了解决这一问题,提出一种双链路传输方案。BS天线工作在全双工模式,BS 通过单天线将导频传输给IRS,然后IRS通过一组预先设计的反射系数将导频反射回BS,BS 基于接收信号进行大时间尺度的信道估计。
3.1.1 基站-智能反射面信道估计
由于估计IRS-BS 的两条信道Gλ均可以使用相同的方法,因此以估计IRS1-BS 的信道G1为例进行说明,为了便于表示,在本小节中将G1简写为G。如图3 所示,估计G所使用的导频由N1个子帧组成,每个子帧包含L个时隙,为了确保接收的导频数大于信道系数的个数,需要满足2 ≤L≤M,则该过程所需导频开销为τG1=LN1。
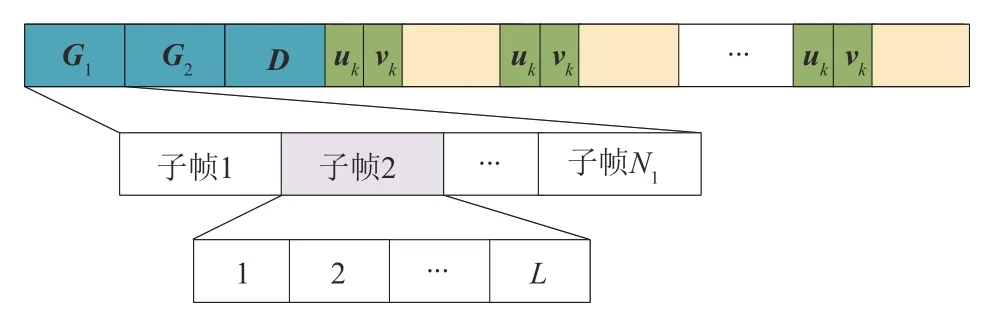
图3 IRS1-BS信道估计阶段的导频结构Fig.3 Pilot structure of IRS1-BS channel-estimation stage
打开IRS1并且关闭IRS2,在第t个子帧中,IRS1处的反射系数θt∊CN1×1取值于N1×N1的DFΤ矩阵。基于全双工MIMO 架构,在第t个子帧的时隙l中,由BS 天线m1=l发射非零导频sm1,t,其余BS 天线不发射导频,则BS 天线m2在子帧t的时隙l中接收到的导频为:
CI 主要是由于BS 工作在全双工模式下,BS 天线m1的发送信号直接被BS 天线m2接收所造成的。CI 抑制的方法已被广泛研究[19-20],其中文献[19]提出的抑制方法可以将干扰降低到比接收机噪声高约3 dB 的水平。因此,假设抑制后的CI 满足在数量级上相同。
假设对于任意的t∊{1,2,…,N1},BS 天线m1发送的导频均满足,其中PBS是发射功率,则对于给定的BS天线m1,m2有:
其中,gm,n=G(m,n)表示BS天线m与IRS的第n个子表面之间的信道,是估计的误差。
基于公式(7),BS分三个阶段估计IRS-BS准静态信道。首先,将IRS-BS准静态信道估计问题划分为N1个独立的子问题,每个子问题用于估计BS 与单个IRS 子表面之间的信道。其次,计算每个子问题的初始估计值。最后,采用坐标下降法对IRS-BS信道估计进行迭代优化。
在第一阶段,分别求解N1个子问题来估计IRSBS 信道。对于给定的IRS 子表面n,第n个子问题可表述为:
为了有助于迭代快速收敛,给公式(8)中的变量赋初始值:
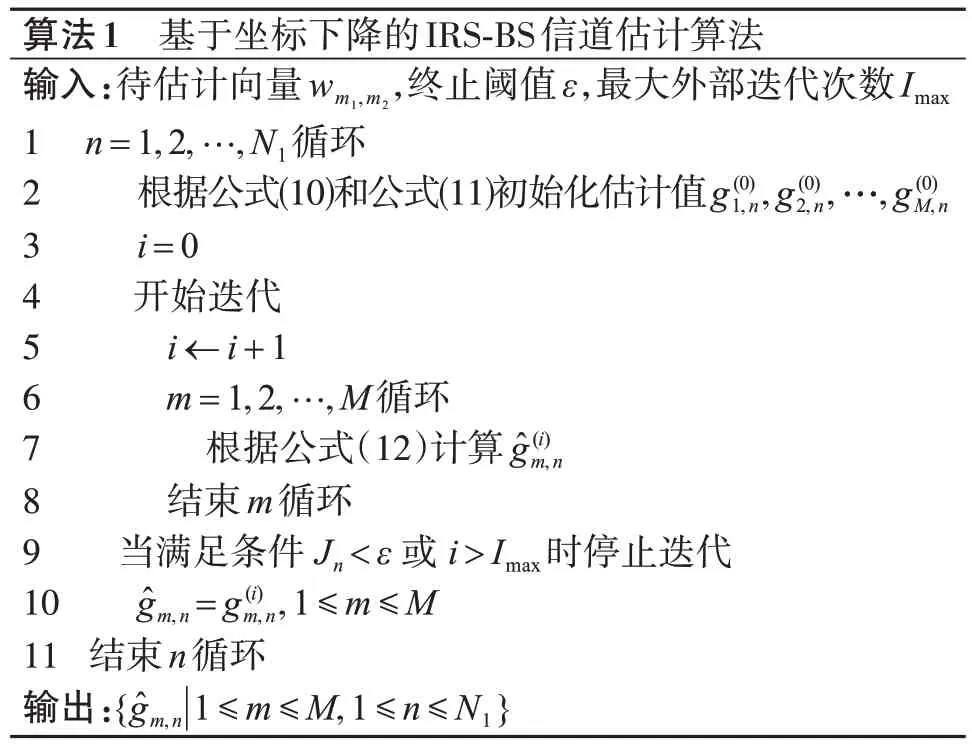
在第三阶段,基于坐标下降算法[10]获得IRS-BS信道的精确估计。基于坐标下降的算法有至多Imax个外部迭代,每个外部迭代由M个内部迭代组成。该算法的关键思想是,在每次外部迭代中,所有系数的估计值全部被优化;在每次内部迭代中,优化一个系数的估计值,同时固定其余M-1 个系数的估计值。在每一次内部迭代中,公式(9)变成一个单变量问题,通过求偏导得到:
算法1总结了基于坐标下降的信道估计算法。
3.1.2 智能反射面级联信道估计
在上一小节已经获得了Gλ信道的估计结果。在此基础上,提出一种估计双智能反射面之间信道的方案。
同时打开IRS1和IRS2,BS 天线m在第t个导频时刻发送非零导频信号st,其中t=1,2,…,τD。假设τD是这一估计阶段需要的导频个数,导频结构如图4 所示。发送的信号经由两个IRS 分别反射后由BS 天线m进行接收。考虑BS 天线为全双工天线,导频信号可以由天线的发射部发射,同时由同一根天线的接收部进行接收,即BS 的天线可以同时发送和接收导频信号[19]。针对同一根天线进行收发时产生的自干扰(Self Interference,SI)问题,采用文献[19]、[20]中提出的自干扰抑制方法可以将SI抑制到较低水平。

图4 IRS1-IRS2信道估计阶段的导频结构Fig.4 Pilot structure of IRS1-IRS2 channel-estimation stage
图5 描绘了导频的传输路径,发送的导频信号共有四条路径,分别为BS-IRS1-BS,BS-IRS2-BS,BS-IRS1-IRS2-BS,BS-IRS2-IRS1-BS。则BS 天线m在第t个导频时刻接收到的信号为:
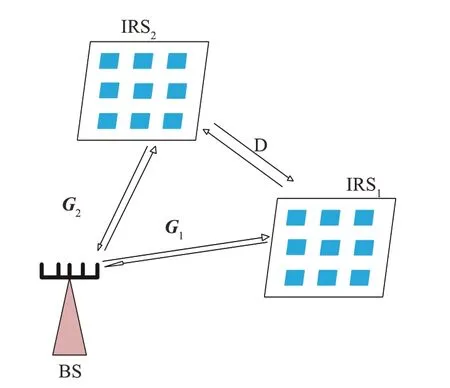
图5 估计IRS1-IRS2信道时导频传输路径分析Fig.5 Analysis results of pilot transmission path for estimating IRS1-IRS2 channel
由于在上一节中已经获得Gλ的估计值,假设估计精度较高,则:
假设对于任意的t∊{1,2,…,τD},BS 天线m发送的导频均满足,将接收到的信号在该阶段的τD个时隙上叠加为Tv×Th矩阵,其中Tv≥N2,Th≥N1,因此有:
其中,A†=(AHA)-1AH,B†=BH(BBH)-1。
3.2 小时间尺度信道估计
在3.1中,已经获得了Gλ和D的信道状态信息。在此基础上,估计两个IRS 到K个UE 的信道uk和vk。因为估计uk和vk的方法相同,以估计uk为例进行说明。
假设用户k发送的导频信号为xk∊CK×1,其中取导频的长度为用户个数K,且不同用户发射的导频信号相互正交,即:
其中,PUE是用户发射导频的功率。则BS 在第t时刻接收到的信号为:
其中,t=1,2,…,τu,τu是估计uk需要的导频数量,导频结构如图6所示,Νt∊CM×K表示BS接收到的噪声。在公式(23)等号两端右乘,有:
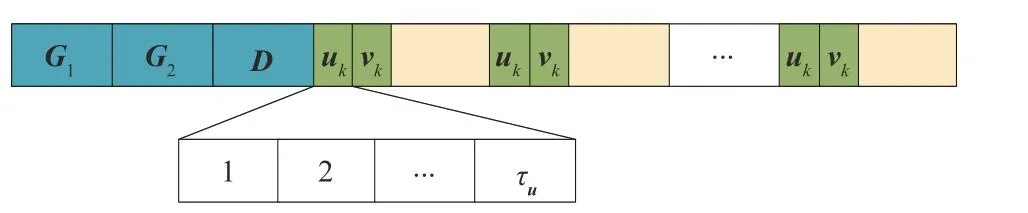
图6 UE-IRS1信道估计阶段的导频结构Fig.6 Pilot structure of UE-IRS1 channel-estimation stage
基于最小二乘法得到IRS1与UEk之间信道uk的估计值为:
同理,可以得到IRS2与UEk之间信道vk的估计值。
4 仿真分析
4.1 导频开销分析
在估计IRS-BS 信道Gλ的过程中,以G1为例,使用N1个子帧,每个子帧由L个时隙组成,其最小导频开销为τG1=LN1。同理,估计信道G2需要的最小导频开销τG2=LN2。在估计两个IRS 之间的信道D的过程中,为满足rank(A)=N2,rank(B)=N1,最小导频开销为τD=N1N2。在估计IRS到多用户的信道uk和vk的过程中,以估计信道uk为例,一共使用τu个导频,为了在τu个导频中能估计N1K个信道参数,有Mτu≥KN1,因此,其中表示大于或等于a的最小整数,因此该阶段最小导频开销τu=,同理,估计信道vk需要的最小导频开销τv=
由于估计准静态信道与时变信道是在不同的时间尺度上进行的,因此为衡量该算法的导频开销需要计算平均导频开销。设TLarge和TSmall分别是准静态信道与时变信道的相干时间,所有信道在其相干时间内假设是保持不变的,而认为信道在相邻的相干时间发生了变化,因此每TLarge和TSmall时间内分别估计一次准静态信道与时变信道。由于准静态信道会在较长的时间内保持不变,而时变信道会在较小的时间内发生变化,因此有TLarge=αTSmall,α表示准静态信道的相干时间与时变信道相干时间的比值,同时α也可以表示大时间尺度与小时间尺度的比值,其物理含义是估计时变信道的频率是估计准静态信道频率的α倍。当IRS 或BS 处于移动状态例如安装在汽车、无人机上时,BS-IRS 信道与IRSIRS信道不再为准静态信道,其相干时间TLarge≈TSmall,即α≈1。但在绝大多数情况下,BS与IRS会架设在较高处且处于静止状态,因此可认为BS-IRS信道与IRS-IRS 信道的相干时间TLarge≫TSmall,即α≫1[21-22],可以通过本文提出的双时间尺度信道估计方案减少导频开销。将估计准静态信道的导频开销平均到每一次信道估计中,由此可得,整个信道估计过程的平均导频开销为:
由公式(29)可以得到,信道估计的导频开销随α的增大而减小,即当准静态信道的相干时间TLarge比较大时,导频开销较低。
提出的双时间尺度信道估计方案与两个对比方案的训练开销如表1 所示。假设两个IRS 有相同的子表面个数且子表面总个数为N,即每个子表面由5×5 个相邻的IRS 反射元件组成,这些反射元件共享一个共同的相移以降低设计复杂性[17-18]。

表1 不同方案的导频开销对比Tab.1 Comparison of pilot overhead values with different schemes
根据表1 使用Matlab 绘制图7。该图分别给出了表1 中多种信道估计方案的导频开销与IRS 子表面总个数N、BS 天线个数M、UE 个数K的关系曲线,其中,L=2,由于大时间尺度与小时间尺度比值α≫1,且在文献[21]的仿真中,作者分别设置α的取值分别为10、20、50进行仿真模拟,因此本文设置α=10[21-22]。图7(a)中M=128,K=50,可以看出导频开销随N的增长而增长。图7(b)中N=40,K=50,导频开销随M的增加而减少。图7(c)中,N=40,M=128,导频开销随K的增加而增加。由图7可见,本文所提出双时间尺度的信道估计方案,其平均导频开销远低于文献[17]和[18]中的对比方案,在用户数量与基站天线数量都较大的大规模MIMO 系统中优势尤为显著,体现了本文方案的有效性。

图7 不同方案的导频开销对比Fig.7 Comparison of pilot overhead values with different schemes
4.2 误差分析
在本小节中给出了信道估计精准度的仿真结果,用数值仿真验证了本文所提出信道估计方案在双IRS 协同辅助多用户MIMO 系统中的精度。设UE-IRS2之间距离为45 m,表示用户集群中心到IRS2的距离是45 m,用户距离用户集群中心位置分布满足均匀分布U(0,3),即任意一个用户与IRS2的距离在42 m到48 m之间均匀分布。同理,IRS2-BS、IRS1-BS、IRS1-IRS2、UE-IRS1的距离分别是5 m、45 m、45 m、5 m。此外,假设BS 具有均匀线性阵列天线,而两个IRS则采用均匀平面阵列。路径损耗模型为γ=γ0d-ξ,其中设置γ0=-30 dB 表示参考距离为1 m时的路径损耗,d表示路径的距离,ξ表示路径损耗指数,对于IRS2-BS和UE-IRS1这两个距离较近的路径,设置ξ=2.2,对于其他相对较远的路径设置ξ=2.8。载波频率为20 GHz,带宽为400 kHz,用户发射功率为2 W。
在下面的仿真中,计算500 次独立衰落信道实现的单反射和双反射信道的归一化均方误差(Normalized Mean Square Error,NMSE)。因为本文方案得到的是各个信道独立的CSI,而对比文献[18]得到的是级联信道的CSI,为了方便对比,因此把独立CSI转化为级联信道的CSI后再进行误差计算。因为两条单反链路使用方法相同,为了避免重复,只考虑UE-IRS1-BS一条单反射路径,即Η1=G1diag(uk)。双反射链路级联信道设为Η2=G2Ddiag(uk)。级联信道的NMSE定义为:
其中,λ∊{1,2}。
图8比较了本文所提双时间尺度信道估计方案与文献[17]、[18]中的信道估计方案的估计误差随信噪比的变化曲线。首先分析单用户场景,BS天线个数M=128,IRS 子表面总个数N=50,用户个数K=1。由图8 可见,两种信道估计方案都是双反射链路的信道估计误差相比于单反射链路较高,这是由于估计双反射链路的信道需要单反射链路的先验信息,因此造成了一定的误差累积。其中图8(a)是基站天线与用户设备天线发送信号功率相同的情况,这时看出本文所提方案的信道估计精准度比文献[17]略高,与文献[18]方案基本一致。图8(b)是基站天线与用户设备天线发送信号功率不同的情况,这是由于受到设备规模与电池续航的限制,移动用户设备发射导频的功率不会很高,而本文所提方案在大时间尺度信道估计阶段采用基站发射导频,发射功率可以远高于用户设备发射导频的功率。图8(b)中基站发射导频功率与用户发射导频功率的比值为10[10],可以看出该情况下本文方案的估计误差相比下更低,性能有了明显的提升。

图8 单用户情况下信道估计精确度对比图Fig.8 Comparison of channel-estimation accuracies in the single-user case
图9反映了文献[18]所提级联信道估计方案与本文所提双时间尺度信道估计方案在多用户情况下,信道估计的误差随信噪比的变化曲线。因为文献[17]与文献[18]采用相同的单用户到多用户扩展方案,且图8 已经说明文献[18]的信道估计方案的估计精度高于文献[17]方案的估计精度,为避免重复,图9 中只分析了本文方案与文献[18]方案的信道估计精度受用户数量的影响情况。对于多用户的情况,由于不同用户的级联信道UE-IRS-BS 中IRS-BS段是相同的,只有UE-IRS段信道是不同的,因此对于已经估计出单用户情况下的级联信道G1diag(u1),其他用户的级联信道G1diag(uk) 是G1diag(u1)的缩放,其中,k=2,3,…,K,据此文献[18]采用估计缩放参数向量来估计整个级联信道的方法来降低导频开销。图9(a)中,绘出了该方案分别在单用户、用户数K=20 以及用户数K=50 时的信道估计误差情况。显然,单用户时误差较低,但对于多用户情况下,由于估计缩放向量带来的误差累积,导致估计精度下降,在单反射链路尤为明显。本文所提双时间尺度方案对于多用户的情况,与单用户情况下方法相同,不需要额外的扩展。如图9(b)所示,本文方案在单用户,用户数K=20,用户数K=50时,误差曲线基本重合,用户数的变化并不会带来精确度上的影响,因此本文所提双时间尺度信道估计方案,在多用户大规模MIMO 场景下,精准度上的优势更加显著。
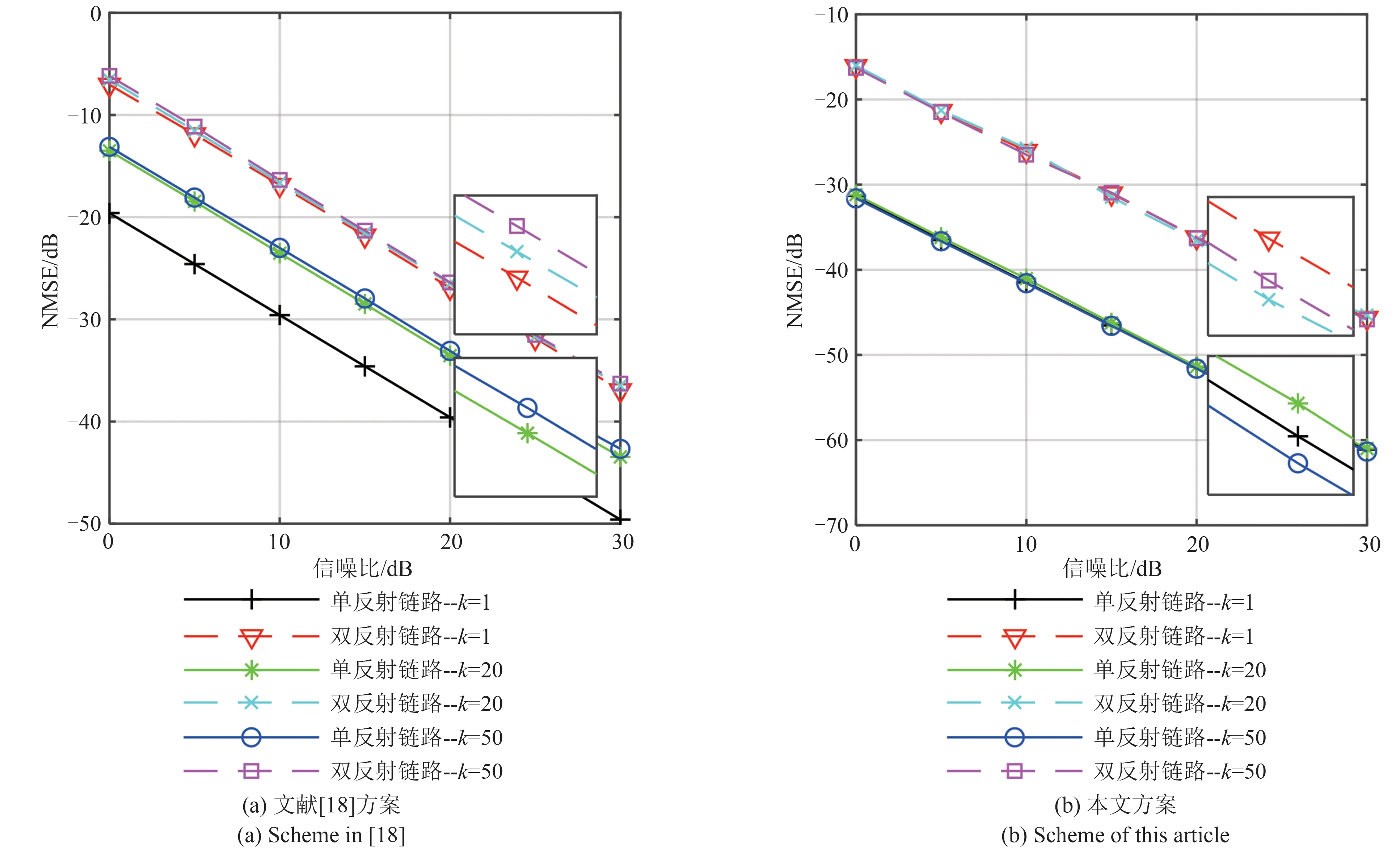
图9 用户数量对信道估计精度的影响Fig.9 Impact of the number of users on channel-estimation accuracy
图10反映了IRS辅助通信系统的和速率在不同的CSI下随信噪比的变化曲线。采用与文献[10]类似的预编码方案,分别使用完美情况下的CSI、本文所提双时间尺度信道估计方案,以及文献[17]与文献[18]信道估计方案获取的CSI,对BS 处预编码矩阵和IRS处的反射系数进行联合优化,和速率表示为:
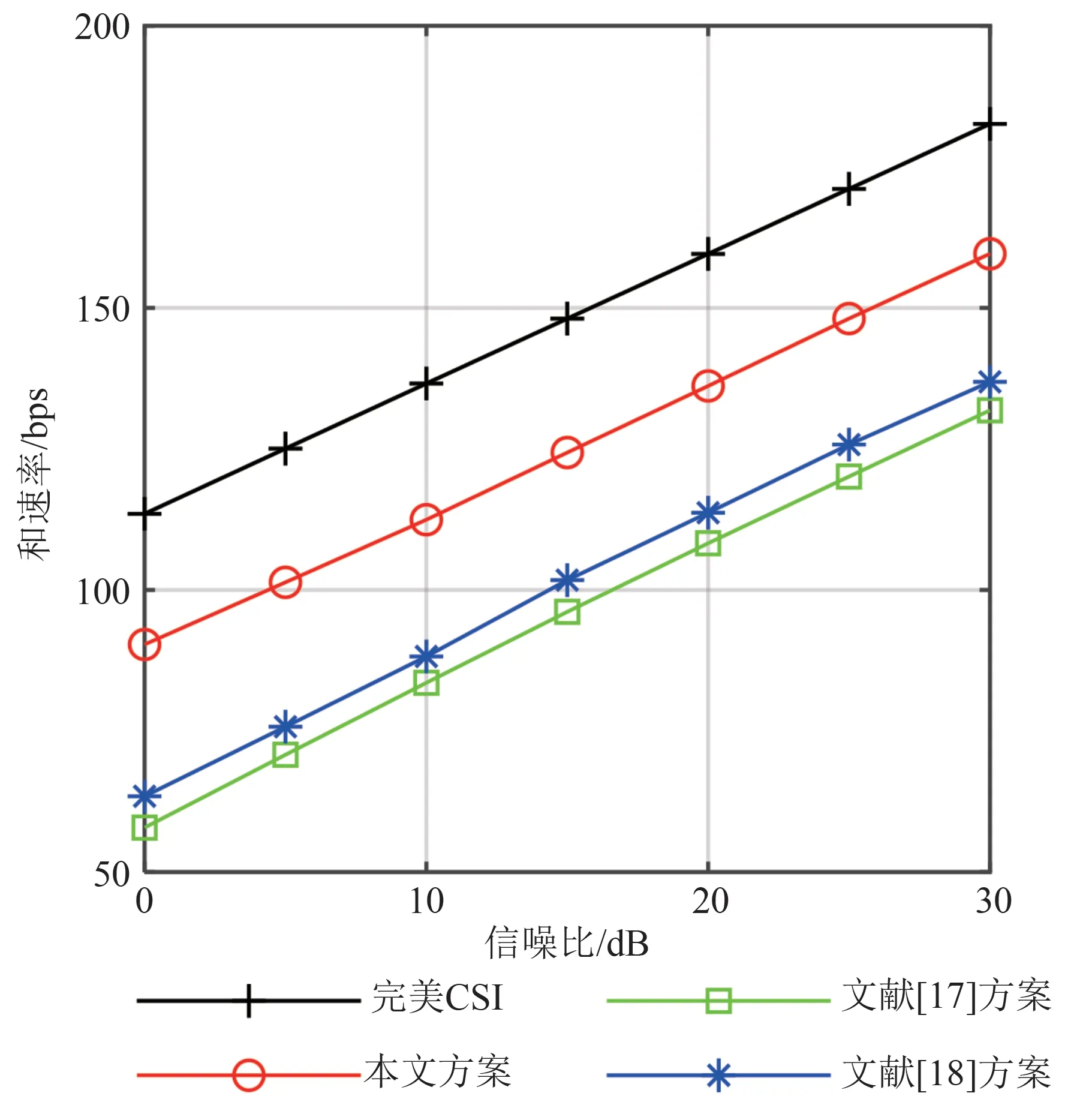
图10 不同信道估计方案带来的和速率的对比Fig.10 Comparison of the sum-rates due to different channelestimation schemes
其中SINRk表示联合优化后第k个用户的信干噪比。从图10可以看出,由于本文所提双时间尺度信道估计方案精度较高,因此相较于对比方案在通信性能上有更好的表现。
5 结论
本文针对双IRS 协同辅助的多用户大规模MIMO 通信系统,设计了一种基于双时间尺度的信道估计方案。该方案适用于双IRS 辅助的、用户数量较多且环境较为复杂的通信场景,如架设双IRS的体育场馆、居民小区、高架桥等[18]。通过在信道估计中降低准静态的IRS-BS 信道与IRS-IRS 信道的估计频率,能够有效减少信道估计的导频开销,从而提高系统传输的有效性。该方案首先单独估计BSIRS信道的CSI,然后据此基于最小二乘法分别估计IRS-IRS 和UE-IRS 信道的CSI。仿真结果表明,该方案在估计精度上有较好的表现,单反射链路与多反射链路信道估计的归一化均方误差相较对比方案分别下降10 dB 与8 dB;由于准静态信道估计频率较低,平均导频开销可以降低至对比方案导频开销的50%以下。而且本文方案可以单独获取各段信道的CSI 从而提供更多的有效信息,充分体现出该方案在有效性、可靠性以及实用性方面的优势。
猜你喜欢
商丘师范学院学报(2023年9期)2023-09-06
中国金属通报(2022年14期)2023-01-06
力学学报(2021年10期)2021-12-02
中国金属通报(2021年12期)2021-11-02
中国金属通报(2021年6期)2021-07-01
能源工程(2021年1期)2021-04-13
中国金属通报(2020年14期)2020-04-22
水利技术监督(2016年6期)2017-01-15
电信科学(2016年9期)2016-06-15
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27