
基于点云技术的汽车外廓尺寸测量方法研究
2024-03-14 09:08叶振洲王孖豪周天龙
自动化仪表 2024年1期
叶振洲,骆 蕾,王孖豪,周天龙,李 健
(1.浙江省计量科学研究院,浙江 杭州 310018;2.国家市场监管重点实验室(声学振动精密测量技术),浙江 杭州 310018;3.浙江省声学振动精密测量技术研究重点实验室,浙江 杭州 310018; 4. 浙江省产品质量安全科学研究院,浙江 杭州 310018)
0 引言
强制性国家标准《机动车安全技术检验项目和方法》[1](GB 38900—2020)已正式发布并实施。该标准对于外廓尺寸参数测量,明确要求“在用机动车安全检验时,牵引车、挂车应组合成汽车列车一并检验”,即牵引车与挂车组合仅通过一次外廓尺寸测量区域,就需分别测量出牵引车的外廓尺寸参数和挂车的外廓尺寸参数。
此前,我国牵引车、挂车的外廓尺寸参数测量多采用多次测量的方式[2-3],即对汽车列车进行“物理分割”。一般有两种方法:一是将牵引车和挂车分离后,分别对检测区域进行测量;二是牵引车头和组合后的汽车列车分两次对检测区域进行测量。根据当前标准要求,该测量方法已经无法满足标准要求。为解决上述问题,目前行业多采取替换相应设备,进行整体硬件升级的方法。该方法成本高昂且造成资源浪费。实际上,传统外廓尺寸测量设备在硬件基础上已经具备了满足标准要求的先决条件,只是在软件算法层面具有明显的不足。因此,若能通过软件算法升级、基于汽车列车的点云数据特征,采用三维点云“算法分割”的测量方法实现牵引车和半挂车的“分离”,可大幅提升检测效率、降低生产成本。
本文提出了一种基于点云技术的汽车外廓尺寸测量方法,仅升级软件算法就可满足GB 38900—2020中对汽车列车外廓尺寸检验的要求。该方法基于汽车列车的点云数据特征,采用三维点云“算法分割”的测量方法,实现牵引车和半挂车的“分离”,可大幅提升检测效率、降低生产成本,具有显著的现实意义。
1 外廓尺寸一并式测量的实现
1.1 外廓尺寸一并式测量原理
半挂车是车轴置于车辆重心(当车辆均匀受载时)后方,且装有可将水平和垂直力传递到牵引车的联结装置的挂车,是通过牵引销与半挂车头相连接的一种重型运输交通工具。半挂车的种类繁多。常见的半挂车有骨架式、平板式、箱式、罐式、轿车运输式、低平板式等。其纵梁又大致分为鹅颈式及平直式两类。
汽车列车(牵引车、半挂车组合)如图1所示。

图1 汽车列车(牵引车、半挂车组合)示意图
由于牵引车和半挂车是通过牵引车上的鞍座与半挂车上的牵引销配合来确保连接,当组合成汽车列车后,牵引车后部将被半挂车前部遮挡。由图1可知,若需一并式测量牵引车以及半挂车的外廓尺寸参数,需要对汽车列车进行“分割”。
目前,车辆外廓尺寸测量原理以激光雷达式[4]、光幕式[5-6]及机器视觉式[7]等为主。其技术核心是采集具有较高密度并分布均匀的,包含被检车辆除正面、尾面及底面外的其他表面的三维点云数据后,将点云数据统一转换至某个三维直角坐标系下,以形成较为完整且详细的车辆三维信息。基于现有大多数检测站外廓尺寸检测设备可提供的条件,若在软件算法层面进行改进,对汽车列车(牵引车、半挂车组合)整车点云数据进行算法分割,就具备仅升级软件算法即可满足GB 38900—2020中新增要求的先决条件。由图1可知,对牵引车、挂车进行算法分割的关键为从汽车列车整车点云数据中找出牵引车长结束关键位置与半挂车长开始关键位置点。
1.2 “算法分割”关键位置的确定
为了使算法能够判断分割关键位置,需要总结、归纳出不同类型、型号车辆分割关键位置及其附近存在的共性特征,以确保其普适性。汽车列车(牵引车、半挂车组合)分割关键位置特征如图2所示。
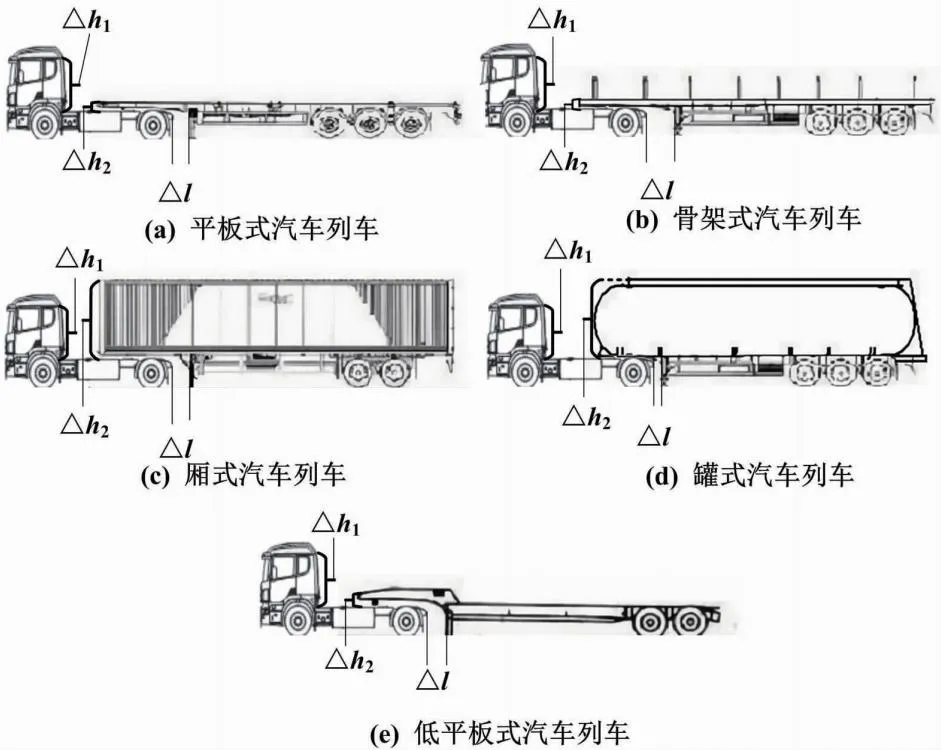
图2 汽车列车(牵引车、半挂车组合)分割关键位置特征
图2中:Δh1为牵引车驾驶室空隙处存在明显阶跃的高度值;Δh2为空隙处至半挂车前部存在明显阶跃的高度值;Δl为牵引车中某间隙的长度值。
因牵引车与半挂车间并非完全刚性连接,车辆转弯等情况下需给牵引车驾驶室后部和半挂车前部之间的相对运动留有一定的空间。各类牵引车及半挂车组合成汽车列车后均存在这一较大空隙。若从汽车列车车头开始观察车辆高度值的变化,可以明显观察到从牵引车驾驶室后部至空隙处高度值存在明显的下降,如图2中各类汽车列车Δh1所示。而从空隙处至半挂车前部处高度值又存在一个明显的阶跃,如图2中各类汽车列车Δh2所示。不同类型的汽车列车的Δh2相差较大。即便是平板式半挂车组成的汽车列车阶跃高度差较小,Δh2一般也大于200 mm。依据上述特征,只需找到阶跃Δh2处的位置,即能确定半挂车长开始关键位置。同样地,因牵引车与半挂车并非完全刚性连接,也需给牵引车后部和半挂车下部之间可控的相对运动留有一定的空间。该空间同样为汽车列车的普遍特征。该空间所处各类汽车列车中的位置如图2中Δhl所示。结合该特征,若能判断该空间所处位置,则该空间Δhl起始处的位置即为牵引车长结束关键位置。
1.3 算法分割的关键算法
现实中的情况往往更为复杂。关键特征位置的各种特征存在众多干扰项,如各种电气路管线、空调、单缸柴油机、天然气罐等物品[8-9]。因此,在定位特征前还需对整车点云数据进行必要的预处理以及判断区域的划分。
干扰物的存在会导致1.2节所述的Δh1与Δh2特征难以判断及定位。干扰物一般位于车辆中轴线附近,因此需对可能存在干扰物的干扰区域中的点云数据进行剔除。算法程序遍历汽车列车整车三维点云数据,以左侧车道线为水平距离零点,分别找出车辆最左侧和最右侧的坐标点。
(1)
式中:xmiddle为车辆中轴线与左侧车道线水平距离,mm;xleft为最左侧的坐标点与左侧车道线的水平距离,mm;xright为最左侧的坐标点与左侧车道线的水平距离,mm。

现实中,1.2节所述的牵引车后部和半挂车下部之间的空隙并非汽车列车下半部分唯一的间隙。若不对牵引车长结束关键位置的判定区域进行限制,而仅从汽车列车整车数据观察,半挂车长开始关键位置与半挂车尾间往往存在不止一个与1.2节所述牵引车长结束关键位置所属特征空间类似的间隙。牵引车长结束关键位置判定区间内各间隙如图3所示。
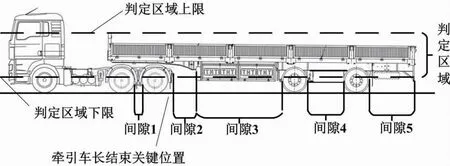
图3 牵引车长结束关键位置判定区间内各间隙
因为牵引车长结束关键位置所属特征空间(图3中间隙2所示)往往并非间隙中长度最大项,也并非从半挂车长开始关键位置开始的第一个间隙,所以仅从汽车列车整车数据观察难以找到牵引车长结束关键位置特征空间所处位置。由此可见,有必要对牵引车长结束关键位置的判定区域进行划分,以突出判定区域内牵引车长结束关键位置所属空间的特征。
判定区间内上下界限及各间隙如图4所示。
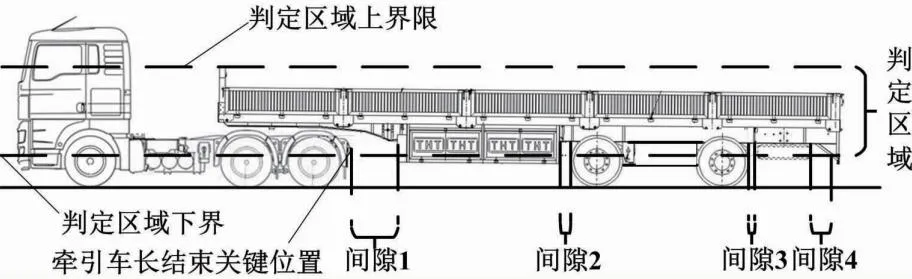
图4 判定区间内上下界限及各间隙
首先,算法采用以下方式确定判定区域的界限。算法程序从高度值明显下降处即半挂车长开始关键位置向半挂车尾方向遍历每帧点云数据,计算每帧点云数据的最低高度值himin。程序得到从高度值明显下降处至高度明显上升处之间所有点云数据帧最低高度值的集合Hmin,同理可得从高度值明显下降处至高度明显上升处之间所有点云数据帧最高高度值的集合Hmax。程序计算Hmin中最大值与Hmax中最小值的平均值,记为hmean。hmean即为判定区间的下界。而高度值明显上升处至挂车车尾所有点云数据帧高度值的最大值,记为hmax。hmax即为判定区间的上界。
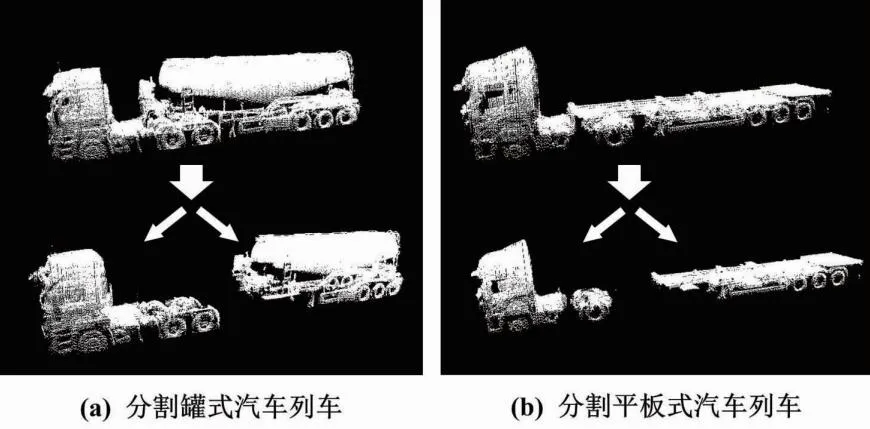
然后,算法通过以下方法计算判定区域内各间隙长度。算法程序从半挂车长开始关键位置向半挂车尾方向遍历每帧点云数据,计算每帧点云数据最低高度值htimin,由此得到从高度值明显上升处至挂车尾处之间所有点云数据帧最低高度值的集合Htmin。遍历Htmin,若某帧点云数据最低高度值htimin在判定区间内,即hmean 最后,程序从汽车列车整车点云数据中分割并提取牵引车与半挂车的点云数据。本文计算Hmin集合中的最大值Mhtmax。整车原始点云数据中满足以下条件的坐标点即属于牵引车的点云数据: (2) 式中:zh1为开始关键位置距牵引车首最前部坐标点水平距离值,mm;zh2为结束关键位置距牵引车首最前部坐标点水平距离值,mm;Mhtmax为Hmin集合中的最大值,mm;xi为任一点距左侧车道线的水平距离,mm;zi为任一点距牵引车首最前部坐标点水平距离,mm;yi为任一点距水平地面的垂直高度,mm。 据式(2)可以分割并提取牵引车的点云数据。 整车原始点云数据中满足如下条件的坐标点即属于半挂车的点云数据: (3) 式中:zh3为结束关键位置所属间隙的结束位置距牵引车首最前部坐标点水平距离值,mm。 根据式(3),可以分割并提取半挂车的点云数据。 采用上述方法分别得到牵引车点云数据及半挂车点云数据后,按普通车辆传统外廓尺寸测量计算方法即可得到牵引车的外廓尺寸参数及半挂车外廓的准确尺寸参数。 为测试上述汽车列车(牵引车、半挂车组合)外廓尺寸测量方法的适用性及准确性,本文选用不同外廓尺寸检测系统收集到的各类汽车列车(牵引车、半挂车组合)的整车点云数据进行分析和算法分割,以得到牵引车的外廓尺寸参数及半挂车的外廓尺寸参数。不同类型车辆算法分割实测结果与误差如表1所示。 表1 不同类型车辆算法分割实测结果与误差 由表1可知,提出的汽车列车(牵引车、半挂车组合)外廓尺寸测量方法对各类型汽车列车均有较好的适用性。国家校准规范《汽车外廓尺寸检测仪校准规范》[10](JJF 1749—2019)中对于车辆外廓尺寸检测仪示值允许误差的要求为±0.8%。实测结果表明,各类型牵引车、半挂车的测量误差均能满足要求。部分汽车列车(牵引车、半挂车组合)点云数据分割实例如图5所示。 图5 部分汽车列车(牵引车、半挂车组合)点云数据分割实例 经过算法分割方法分割后,牵引车、挂车各自的点云模型数据完整、清晰,可以较好地兼容大部分市场上现有车辆外廓尺寸自动检测系统的一般车辆外廓尺寸测量方法,具有较强的通用性。从时间效率上看,与传统方法需将车头与车身人工分离且需要重复测量相比,所提方法在测量效率上的优势是指数级的。即使以传统方法最理想状态下计算,也可将测量、计算并获得数据的时间由“小时级”提升为“秒级”。 本文提出了一种基于现有外廓尺寸检测硬件设备的汽车列车(牵引车、半挂车组合)外廓尺寸测量方法,仅升级软件算法就可满足GB 38900—2020中“在用机动车安全检验时,牵引车、挂车应组合成汽车列车一并检验”的要求。该方法可以实现在无需对牵引车、半挂车的外廓尺寸参数进行分别测量的基础上,仅通过一次外廓尺寸测量即可从汽车列车(牵引车、半挂车组合)整车点云数据中分割出牵引车、半挂车各自的点云数据并计算出牵引车和半挂车各自的外廓尺寸参数。试验结果表明,所提方法能够覆盖市场上大部分汽车列车外廓尺寸测量的需求,具有广泛的适用性与较高的测量精确度。在提高检测效率方面,该方法可将传统方法测量耗时从“小时级”提升为“秒级”,优势明显。此外,所提方法还支持分别保存汽车列车(牵引车、半挂车组合)中牵引车、半挂车各自的点云数据,以便检测机构再次进行该汽车列车外廓尺寸测量时进行比对,从而检查车辆是否存在外廓尺寸上的非法改装等问题。2 分析与讨论

3 结论
猜你喜欢
中老年保健(2022年1期)2022-08-17
小资CHIC!ELEGANCE(2022年2期)2022-01-11
中学生数理化(高中版.高考理化)(2021年6期)2021-07-28
装备制造技术(2020年3期)2020-12-25
航空发动机(2020年3期)2020-07-24
数学物理学报(2020年2期)2020-06-02
中国设备工程(2017年23期)2017-01-20
广西电力(2016年4期)2016-07-10
汽车实用技术(2015年8期)2015-12-26
中国商人(2013年1期)2013-12-04
