认知分心情境下驾驶人应激反应行为研究
2024-03-14 11:38杨艳群黄永健罗秀玲SaidEASA郑新夷
重庆交通大学学报(自然科学版) 2024年3期
杨艳群,黄永健,罗秀玲,Said M.EASA,郑新夷
(1. 福州大学 土木工程学院,福建 福州 350116; 2. 福州大学 交通心理与行为国际联合实验室,福建 福州 350116; 3. 多伦多大都会大学 土木工程系,安大略 多伦多,加拿大; 4. 福州大学 人文社会科学院,福建 福州 350116)
0 引 言
驾驶是一项复杂的任务,驾驶安全性受驾驶人的认知水平、记忆负荷、行为控制、视觉和决策能力等影响[1]。大量交通事故缘由驾驶分心,即驾驶人将注意力转移到与驾驶无关的任务上,包括认知、视觉和听觉上的分心[2]。2006年,NHTSA开展的一项公路自然驾驶实验发现大约80%的碰撞和追尾是由驾驶人的各种分心造成的[3]。各种分心中认知分心是导致驾驶人意识偏离驾驶任务的重要原因[4]。目前,关于认知分心对驾驶人影响的研究大多从分心或认知任务着手[5-6],以不同类型的次任务作为诱导分心的条件,探究认知分心情境下驾驶人的行为表现[7]。认知分心时,驾驶人视觉信息处理能力降低,影响了其环境感知、判断和决策能力,从而引发交通事故[8-9]。M. N. RASTGOO等[10]研究发现,驾驶人品质中对交通事故的影响最重要的是驾驶人的应激反应能力,即面对突发状况时驾驶人依靠自身驾驶技能和经验做出快速避险行为的能力。近年来,大量的研究者开始将认知分心与应激反应相结合[11],选取典型应激场景和分心次任务[12],进行分心情境下的自然驾驶或模拟驾驶应激实验,通过研究实验过程中驾驶人的心率、脑电波等生理指标[13],瞳孔直径、眨眼频率、注视次数等视觉特性,以及驾驶人的制动特性和转向控制反应[14],来分析驾驶人认知分心下的应激反应行为[15-16],得出结论:认知分心会较大程度地影响驾驶人的应激反应,增加行车中的不安全性[17]。笔者利用驾驶模拟系统构建驾驶人认知分心 + 应激场景的研究框架,结合眼动仪、脑电仪探究认知分心情境下驾驶人的应激反应行为特性,并通过集对分析(set pair analysis, SPA)模型对实验结果进行讨论,完成了不同应激场景下驾驶人应激反应安全性评估。
1 应激反应实验
1.1 实验被试
共招募了40名持有C1驾驶证健康驾驶人作为被试,均为福州大学在校学生,男女各半,年龄20~30岁,驾驶经验为1~6年。
1.2 实验设备
1)Dikablis眼动仪,用于记录驾驶人眼动行为的变化情况,可实时记录驾驶人眼部运动特征,采样频率为60 Hz。
2)NE无线脑电仪,用于采集、处理与分析驾驶人在应激模拟场景中的脑电行为数据,可实现32个通道、500 SPS采样频率、24 bit分辨率的脑电数据采集。
3)DSR-1000TS 2.0 驾驶模拟系统,用于记录驾驶人的驾驶行为特征和汽车动力学特性等,由座舱系统、控制台及含3台60寸4 K液晶显示器的显示系统所组成,如图1。

图1 DSR-1000TS 2.0驾驶模拟系统Fig. 1 DSR-1000TS 2.0 driving simulation system
1.3 实验场景设计
实验路段为全长15 km、设计速度60 km/h的两车道公路。为减少其他道路元素对驾驶人的干扰,道路两侧基本不设置建筑物;道路主要为直线,无长下坡、急弯或陡坡等特殊线形。所有场景元素的设置均符合GB 5768—2022《道路交通标志和标线 第2部分:道路交通标志》。
根据文献[18],由设计速度60 km/h计算得到制动距离,并设置触发区,确保驾驶人能进行有效应急避险;根据文献[19],选择3种应激场景进行实验,并与无应激场景进行对比(图2):

图2 场景仿真Fig. 2 Scenario simulation
1)无应激场景,实验车A以不高于60 km/h 的速度行驶,路边有停靠车队。
2)应激场景1——行人-机动车,实验车A以不高于60 km/h 的速度行驶,行人以5 km/h 的速度突然从停靠车辆前方横穿道路。
3)应激场景2——非机动车-机动车,实验车A以不高于60 km/h 的速度行驶,自行车以18 km/h 突然从停靠车辆前方驶。
4)应激场景3——机动车-机动车,实验车A以不高于60 km/h的速度行驶,车辆B以2 m/s2的加速度突然从路旁车队驶出,随后以27 km/h的速度沿车道行驶一定时间。
1.4 实验设计
为研究驾驶人认知分心下的应激行为,笔者采用N-back的研究范式作为驾驶次任务。考虑不同级别次任务对驾驶人负荷的影响,采取负荷水平介于中等的2-back任务作为诱发认知分心的次任务[20]。在0~9的数字中,每次选取5个数字随机排列,采用语音播报的形式,让被试者判断最后所呈现的数字与倒数第2个数字是否一致。指令完成后2.5 s内出现应激场景。除应激触发事件不同之外,设计的3种应激场景的其他要素完全相同。各被试需要在3个不同的应激场景中进行实验,实验中收集被试的眼动、脑电和与驾驶绩效相关的指标数据。实验方案如图3。

图3 实验方案Fig. 3 Experiment scheme
1.5 实验指标
H. ALMAHASNEH等[21]研究表明,驾驶人认知分心可以从眼球运动、脑电波变化及驾驶绩效参数中体现,因此,笔者采用这3类指标来评价驾驶人应激反应行为。
1.5.1 眼动指标
1)瞳孔直径DP,反映驾驶人认知负荷、压力、疲倦感和注意力。DP越大,驾驶人负荷和注意力集中程度越高。
2)眨眼频率fB,单位时间的眨眼次数,表征驾驶人视觉负荷、情绪和疲劳状态。fB越低,驾驶人疲劳和视觉负荷越大。
1.5.2 脑电波指标
1)β波能量值Eβ,检测驾驶人警觉状态的指标。Eβ越大,驾驶人警觉性越高。
2)脑电能量比值(Eα+Eθ)/Eβ,检测驾驶人疲劳状态的指标。(Eα+Eθ)/Eβ比值越大,驾驶人越疲劳。
1.5.3 驾驶绩效指标
1)纵向速度V,任务期间车辆行驶速度,表征驾驶人的分心程度和操控稳定性。V降幅越大,驾驶人分心程度越高。
2)制动踏板深度DBP,应激事件发生时制动踏板的深度。DBP越大,驾驶人的纵向控制稳定性越低。
3)方向盘转角δS,应激事件发生时转动方向盘的角度。δS越大,驾驶人的控制能力越差,车辆的横向稳定性越差。
1.6 实验过程
采用驾驶模拟系统进行实验,实验前要求被试填写一份基础性问卷,以了解被试的精神、情绪等状况;检查设备运行情况,并让被试在非实验场景的路段上行驶5 min以熟悉操作;对驾驶人进行2-back任务培训,讲解本次任务的完成要求;被试佩戴实验设备,调试,随后进入正式实验。
每结束一个实验场景,被试休息5 min以缓解疲劳;待休息结束后重新调试眼动仪和脑电仪,随机加载下一个实验场景和动态交通流;重复以上的实验流程直到完成所有的场景。实验员依据被试的操作收集各平台的数据,结束后保存数据并导出。
2 实验结果分析
2.1 实验结果方差分析
采用SPSS对所采集的数据进行两因素重复测量方差分析,研究在3种应激场景下正常驾驶和认知分心驾驶对驾驶人眼动、脑电波与驾驶绩效指标的影响情况,结果见表1~表3。
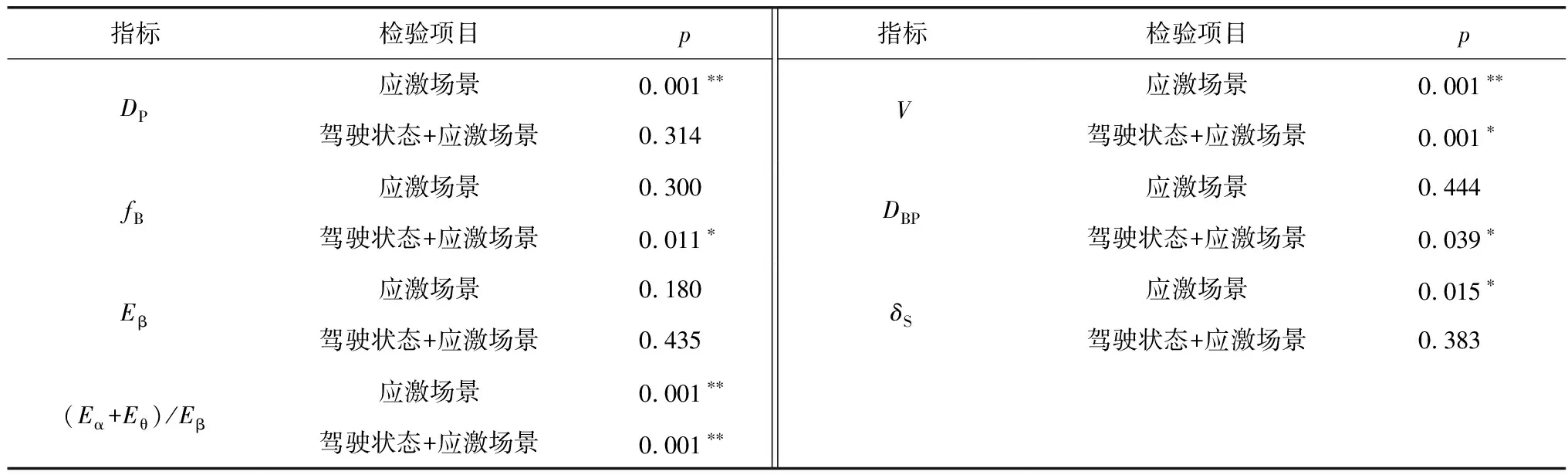
表1 各指标球形度检验结果Table 1 Sphericity test results of each index

表2 各指标交互效应检验结果Table 2 Test results of interaction effects of each index
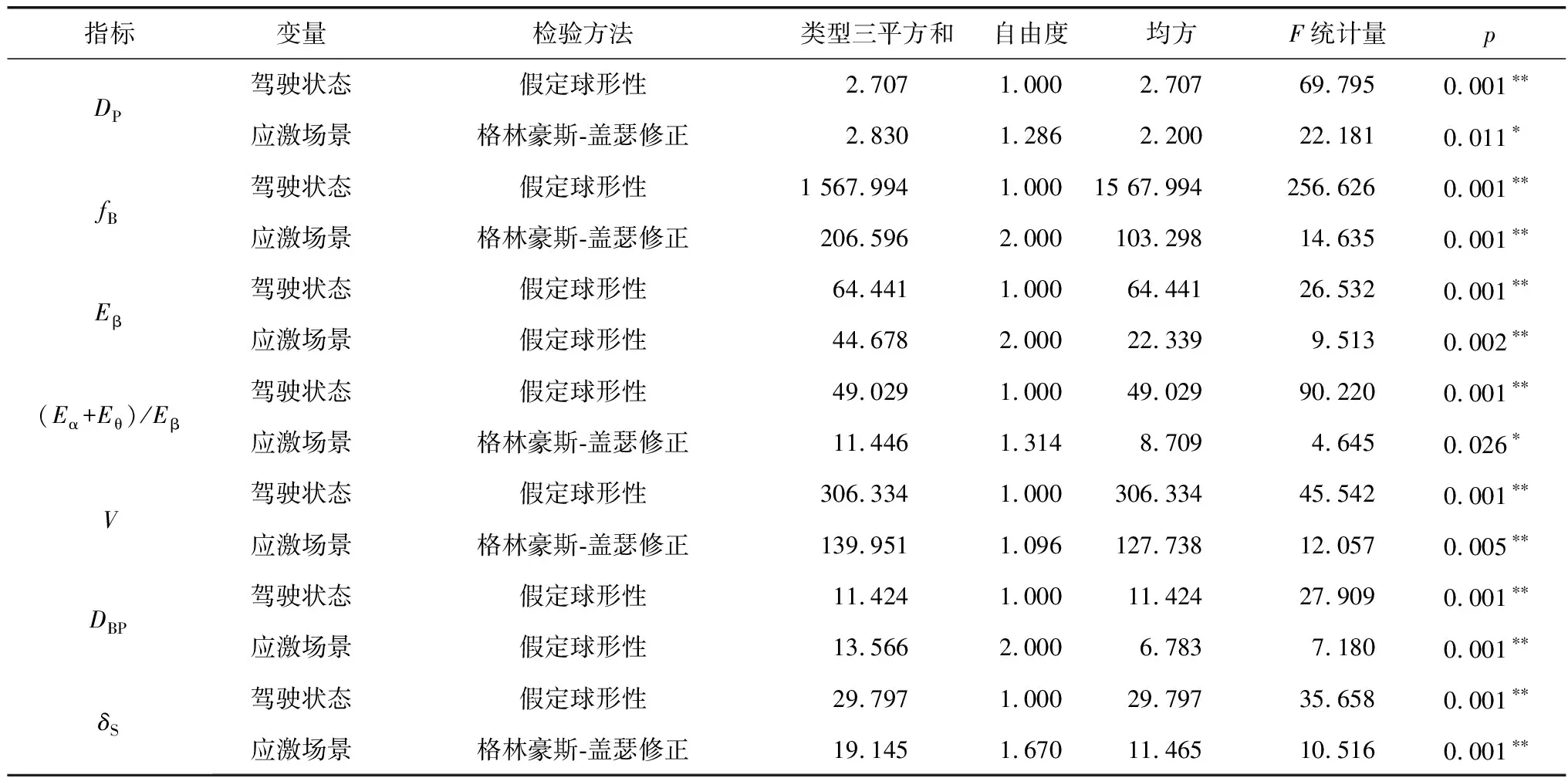
表3 各指标主体内效应检验结果Table 3 Test results of intra-body effects of each index
由表1~表3可知:
1)瞳孔直径DP:驾驶状态与应激场景的交互项满足球形假设检验,但无统计学意义(p=0.555),因此不存在交互效应;而主效应结果显示,二者均对瞳孔直径有着显著影响(p<0.05)。
2)眨眼频率fB:驾驶状态和应激场景在眨眼频率数据中未表现出交互效应;而主效应结果显示二者对眨眼频率高度显著(p<0.01)。
3)脑电β波能量值Eβ:驾驶状态与应激场景在Eβ下的交互项满足球形假设检验,但无统计学意义(p=0.052),交互效应不显著;而主效应分析表明二者对驾驶人的Eβ均有高度显著关系(p<0.01)。
4)脑电能量比值(Eα+Eθ)/Eβ:实验的2个变量对(Eα+Eθ)/Eβ比值不存在交互效应;而二者对(Eα+Eθ)/Eβ比值的主效应均显著(p<0.05)。
5)纵向速度V:实验的2个变量在纵向速度数据中交互效应不显著;而主效应分析都高度显著(p<0.01)。实验中,笔者以触发区作为时间原点对纵向速度进行统计分析,区间范围为前15 s和后12 s,时间间隔为3 s[22]。
6)制动踏板深度DBP:实验的2个变量不存在交互效应,但对制动踏板深度的单独主效应都高度显著(p<0.001)。
7)方向盘转角δS:驾驶状态和应激场景的交互项在方向盘转角指标下满足球形假设检验,但无统计学意义(p=0.980),故无交互效应;而主效应结果显示,二者对方向盘转角的主效应均高度显著(p<0.001)。
2.2 应激反应评价指标分析
图4为3种应激场景下,各项应激反应评价指标实验结果。

图4 不同应激场景下各项指标实验结果Fig. 4 Test results of each index in different stress senarios
对图4的分析如下:
1)眼动分析
①瞳孔直径DP〔图4(a)〕:认知分心驾驶工况瞳孔直径显著高于正常驾驶工况;3种应激场景下,应激场景1认知分心驾驶工况瞳孔直径均值最大,应激场景3正常驾驶工况瞳孔直径均值最小。说明认知分心驾驶会增加驾驶人的视觉负荷,需增大瞳孔直径来加工有效视觉信息,这一结论与文献[23-24]的结果相吻合。因此,驾驶人处于应激状态时,需要比正常驾驶时投入更多的注意力来维持驾驶的安全。
②眨眼频率fB〔图4(b)〕:认知分心驾驶工况眨眼频率显著低于正常驾驶工况;3种应激场景下认知分心驾驶和正常驾驶两种工况眨眼频率均值在应激场景1均最高。说明在认知分心驾驶工况,驾驶人应对应激事件时紧张程度增加,驾驶人通过抑制眨眼来集中注意力,眨眼频率下降,这与文献[25]的结论相吻合,当行人和非机动车作为应激源时这个现象更为显著。
2)脑电波分析
①脑电β波能量值Eβ〔图4(c)〕:正常驾驶和认知分心驾驶两种工况,从应激场景1→应激场景2→应激场景3,驾驶人的Eβ值依次递减,且认知分心驾驶工况Eβ显著高于正常驾驶工况。说明在认知分心驾驶情境下,驾驶人的警觉性更高,并且道路交通中的弱势群体(如行人、自行车等)更易引起认知分心驾驶时驾驶人脑电β波Eβ值的增大。
②脑电能量比值(Eα+Eθ)/Eβ〔图4(d)〕:3种应激场景下,驾驶人在认知分心驾驶工况的(Eα+Eθ)/Eβ比值均显著高于正常驾驶工况的,且行人应激源的(Eα+Eθ)/Eβ比值最高。
3)驾驶绩效分析
纵向速度V〔图4(e)〕:认知分心驾驶工况纵向速度较正常驾驶工况低,说明此时驾驶人紧张程度增加,越接近冲突点纵向速度降低越快,在冲突点位置达到最低,随后又逐渐提升。认知分心驾驶工况,3种应激场景中,场景1的纵向速度最低,变化幅度最大。
4)制动踏板深度DBP
认知分心驾驶工况3种应激场景的踏板深度均高于正常驾驶工况,其中应激场景1认知分心驾驶工况制动踏板深度最大,数据变化幅度最大,稳定性最低。说明在认知分心驾驶情境下,驾驶人更多地通过频繁操作制动踏板、增大制动踏板深度等补偿行为来保持车辆纵向安全性的正常水平,这与文献[26]的研究结果相吻合。
5)方向盘转角δS
正常驾驶工况方向盘转角小于认知分心驾驶工况,基本在1~5°内变化,数据波动较小;认知分心驾驶工况方向盘转角值的波动更明显。表明在发生认知分心后,面临应激事件,驾驶人对方向盘的控制能力降低,这与文献[27]的研究结果相吻合。行人应激场景对驾驶人认知分心驾驶时方向盘转角的影响最明显,数据波动最大。
综上,相比正常驾驶,驾驶过程中的认知分心次任务会影响驾驶人的驾驶行为、增加驾驶人的精神负荷,并且不同的应激事件对驾驶人的各项指标影响程度不一,因此需通过综合分析进行评价。笔者选用SPA-SPA综合评价方法对认知分心情境下驾驶人应激反应行为进行安全性评价。
3 安全性评价
3.1 AHP-SPA综合评价模型
层次分析法(analytic hierarchy process, AHP)是系统分析的重要工具,其核心思想是将复杂的决策问题分解成一系列层次结构,通过对不同层次的因素进行比较和评价,最终得出最优解决方案的方法,适用于各种类型的决策问题[28]。
集对分析(set pair analysis,SPA)是处理系统确定性与不确定性相互作用的数学理论,其核心思想是将评价对象进行确定性与不确定性的统一,通过同、异、反三方面特征明确评价指标隶属关系,再利用联系度理论进行量化处理,最终结合隶属等级范围做出综合性评价[29]。
3.1.1 确定评价集合形成集对
在利用SPA进行评价前,先要确定系统中的评价集合,包括评价指标集和评价标准集,二者构成SPA中的集对。
图5为构建的评价指标集。图中:U为目标层;一级指标为眼动(u1)、脑电波(u2)和驾驶绩效(u3);二级指标为瞳孔直径DP(u11)、眨眼频率fB(u12)、脑电β波能量值Eβ(u21)、(Eα+Eθ)/Eβ(u22)、纵向速度V(u31)、制动踏板深度DBP(u32)、方向盘转角δS(U33)。

图5 评价指标集Fig. 5 Evaluation index set
从安全性角度对评价标准集的评价标准进行划分,基于“均分原则”把评价等级的区间[-1.0,1.0]均分为[-1.0,-0.6),[-0.6,-0.2),[-0.2,0.2),[0.2,0.6),[0.6,1.0],分别对应“很差”“差”“较差”“较好”“好”共5个等级。
3.1.2 归一化处理
在形成集对以后,由于评价指标集各指标具有不同的量纲,无法直接代入计算,因此在计算之前需要对各指标数值进行归一化处理。笔者采用极值法进行归一化处理,将不同量纲的特征值统一在[0,1]之间。
3.1.3 计算单指标隶属度
数据归一化处理之后,需要计算各指标的隶属度,用于后续SPA的联系度计算。由于评价标准集中将安全性等级划分为5个等级,因此采用指派方法确定样本指标隶属度[30]。由于评分值与指标之间隶属程度的关系在所有域内都不具有单调性,故利用中间型的最大隶属函数来确定指标的隶属度。
3.1.4 确定权重
笔者采用AHP方法来确定指标权重。首先,通过专家咨询法对评价指标体系中的一、二级指标进行相对重要性比较,以确定它们在整个层次结构中的相对重要程度;然后,利用AHP方法计算各个指标的权重,并进行一致性检验以验证权重计算的合理性;最后,将各层次的权重综合起来,确定最终评价对象的权重。
3.1.5 确定评价等级
根据由AHP计算得到的各评价指标的权重以及由中间型最大隶属函数确定的指标隶属度,可以计算出评价对象的联系度值,进而确定评价等级。由于评价标准集中将安全性等级划分为5个等级,因此联系度对应的维度为五元联系度。
3.2 综合评价结果
3.2.1 指标隶属度
根据确定的安全性等级计算得到各评价指标的隶属度,结果如表4。

表4 应激场景1~3评价指标隶属度Table 4 Evaluation index membership for stress senario 1, stress senario 2 and stress senario 3
3.2.2 指标权重汇总
根据AHP计算得到各指标的权重,结果见表5。

表5 各指标权重计算结果Table 5 Weight calculation results of each index
3.2.3 一级指标五元联系度数值及评价等级
根据表5中的二级指标权重,结合表3中不同应激场景下各指标在正常驾驶和认知分心驾驶两种工况下的指标隶属度,可得到不同应激场景下一级指标的五元联系度表达式,由此计算得到一级指标的联系度值a1,并划分评价等级,结果见表6。

表6 一级指标联系度数值及评价等级Table 6 Connection degree value and evaluation level of first-level indexes
3.2.4 目标层五元联系度数值及评价等级
同理,根据表5中的一级指标权重,结合表3中不同应激场景下各指标在正常驾驶和认知分心驾驶2种工况下的指标隶属度,可得到不同应激场景下目标层的五元联系度表达式,由此计算得到目标层的联系度值a,并得到评价等级,结果见表7。

表7 目标层联系度数值及评价等级Table 7 Connection degree value and evaluation level of the target layer
由表7可见:
1)在正常驾驶和认知分心驾驶两种工况下,不同指标、不同应激场景对驾驶人的应激反应有着不同影响。在评价指标集中,各指标的权重以驾驶绩效为最高,脑电指标次之,眼动指标最低。表明驾驶人的驾驶绩效最能反映其应激反应行为的安全程度,在安全防护中需要优先考虑。
2)正常驾驶工况驾驶人应激安全评价等级显著优于认知分心驾驶工况。表明在分心次任务的干扰下,驾驶人的应激反应行为安全性会显著降低,表现为驾驶人的疲劳程度增加,对车辆稳定性的控制下降,需要更高的警觉性来避免发生交通事故。
3)应激场景安全评价等级以机动车应激场景为最高,非机动车应激场景次之,行人应激场景最低。原因是行人横穿马路的不确定性最高,驾驶人完全不能预知行人会在何时、何位置,以何种运动轨迹横穿马路;并且行人作为道路使用者中的弱势群体,在事故中遭受到伤害的可能性最高[31],因此驾驶人在认知分心驾驶工况对行人应激场景的安全评价最低。
4 结 论
基于驾驶模拟实验,设计了3个应激场景,选择规范化次任务 2-back 诱导认知分心,利用AHP-SPA评价模型,揭示了驾驶人在不同分心情境下驾驶应激反应行为的特性及差异性。研究得到以下结论:
1)认知分心会增加驾驶人应激状态下的视觉负荷和紧张感,导致瞳孔直径增大、眨眼频率下降等视觉行为变化,影响驾驶任务的执行。
2)在应激场景下,相较于正常驾驶,在分心次任务的影响下驾驶人的β波能量值Eβ与(Eα+Eθ)/Eβ比值均显著提高,即面对应激事件,驾驶人警觉性提高的同时伴随着疲劳程度的增加。
3)认知分心驾驶工况驾驶人面对应激事件对车辆的控制能力会降低,表现在频繁操作制动踏板和方向盘转角的增大。
4)由AHP-SPA的综合评价结果可以得知,相比正常驾驶,认知分心驾驶会降低驾驶人应激反应行为的安全性,影响其对车辆的控制;根据影响程度大小,认知分心驾驶情境下应激场景安全评价等级以机动车应激场景为最高,非机动车应激场景次之,行人应激场景最低。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
煤气与热力(2022年4期)2022-05-23
舰船科学技术(2021年12期)2021-03-29
铁道通信信号(2020年1期)2020-09-21
计算机应用(2018年12期)2019-01-08
商周刊(2018年26期)2018-12-29
现代电生理学杂志(2016年3期)2016-07-10
现代电生理学杂志(2016年4期)2016-07-10
现代电生理学杂志(2016年1期)2016-07-10
现代电生理学杂志(2015年1期)2015-07-18