基于高频方波注入的永磁同步电机控制优化
2024-03-16 01:34张嘉鑫夏加宽杨昌卓
微特电机 2024年2期
张嘉鑫,夏加宽,杨昌卓
(沈阳工业大学 电气工程学院,沈阳 110870)
0 引 言
内置式永磁同步电动机(以下简称IPMSM)以其高效率、高功率因数、良好的动态性能等优点在工业领域得到了广泛的应用。矢量控制等典型控制方法获得准确的转子位置信息时需要稳态和动态条件,而位置传感器的加入会对电机本身的优化造成影响。为了减少机械传感器对于电机的影响,IPMSM的无位置传感器控制策略近年来受到了工业领域的广泛关注。传统的无传感器控制方法[1-2]主要分为高速范围控制方法和低速范围控制方法。高速范围无传感器控制方法基于反电动势的估计,该方法在电动势足够大的情况下可以应用,并且可以较好地检测到转子位置。而在低速运行时,反电动势数值过于低,导致获取不到转子位置信息[3-4]。当电机低速运行时,通常在额定转速的5%以下,采用基于IPMSM显著特性的信号注入方法来获得转子位置。本文主要研究在低速状态下无传感器运行的改进。
根据注入高频信号的类型,信号注入主要分为旋转正弦电压注入[5-6]、脉振正弦电压注入[7]、方波电压注入[8-10]。早期提出的旋转电压注入方法,将旋转电压信号注入静止坐标系中,提取感应电流获得位置信息。高频旋转正弦电压注入法的广泛使用离不开其较好的稳定性,即系统收敛时的快速性和收敛点的不易发散性[11-12]。但是,这种方法需要使用低通滤波器(以下简称LPF)来分离高频电流和基波电流,从而降低了动态性能[10]。为了改进旋转电压注入法,脉振电压注入和方波电压注入都将高频电压信号注入旋转坐标系。这两种方法比较简单,对于方波电压注入法,也可以去掉LPF。根据目前的研究,方波电压注入应该是IPMSM低速无位置传感器控制的最佳选择。
然而,基于信号注入的无传感器控制方法存在可靠性问题。在大多数情况下,无传感器方案主要用于容错控制或少数不需要高动态性能的应用,如家用电器、泵、风扇等。由于以下的两个原因,上述传统技术都缺乏可靠性:首先,由数字滤波器引起的相位误差降低了速度环和电流环的带宽;其次,虽然方波电压注入方法可以实现与滤波器无关的特性,但脉振电压注入和方波电压注入是通过位置估计误差收敛为零得到的估计转子位置来建立的,而模糊的收敛点会使系统不稳定[13]。因此,为了使高频注入法驱动得到更广泛的应用,需要提高控制方法的可靠性。
目前,已经开展了一些研究来解决这个问题。这些方法的核心是将高频电压注入静止坐标系而不是旋转坐标系,当信号注入静止坐标系时可以避免收敛出错。在文献[13]中,向静止坐标系注入高频脉振载波电压,与传统的旋转电压注入相比,注入信号形式更简单,不需要进行复杂的坐标变换。由于降低了位置误差的错误收敛,整个控制系统也变得比较稳定。然而,这种方法会在注入信号过程中产生额外的直流偏置,当电机以超低速度运行时需要进行相位补偿。在文献[13]的基础上,文献[14]提出了一种将高频方波电压注入旋转坐标系的无传感器控制方法,由于其单独向α 轴注入方波,所以其同时具有旋转注入法和脉振注入法的优点。然而,这种方法也会引起直流偏置误差,需要进行相位补偿。为了简化信号处理,分别在文献[15]和文献[16]中提出了在ABC相注入脉振载波电压和在估计定频旋转坐标系注入高频脉振电压。虽然直流偏置通过几个中间变量的简单相加计算可以消除,但大部分的数字滤波器用于分离电流,这降低了系统的带宽。文献[17]针对正交方波注入方法做了进一步改进,对周期内的4个采样点采用了各不相同的解调方法。这种方法对采样点数的要求很高,对电流传感器的快速反应要求也很高。
本文提出一种基于正交方波电压注入静止坐标系的无传感器控制优化策略,并在多工况下进行检测。注入电压的频率设定为电流采样频率的四分之一,通过对高频电流的离散分析,可以估计出转子的位置;通过对离散变量进行简单相加计算,可以消除LPF的影响;通过相位补偿可以消除高通滤波器(以下简称HFP)和数字延迟的影响。
1 高频注入下IPMSM数学模型
IPMSM在d,q轴上的电压方程:
(1)
式中:ud,uq和id,iq分别为定子电压和电流;Rs为定子电阻;Ld和Lq为定子电感;ωe为电机转子转速;ψf为磁链磁通。
注入高频正弦电压表示:
(2)
式中:uαh和uβh为注入电压;Vh为注入电压的幅值;ωh为注入信号的频率。电机低速运行时,注入频率设置得足够高,则可以忽略式(1)中定子电阻上的电压降和与转子转速相关项。
然后,将式(1)通过坐标变换转化到静止坐标系,仅考虑高频项,IPMSM的高频模型可表示:
(3)
式中:iαh和iβh为高频振子从定子电流中提取的高频定子电流;L0为平均电感,L0= (Ld+Lq)/2;L1为差分电感,L1= (Ld-Lq)/2;θe为转子位置。将式(2)代入式(3),再通过积分运算可以得到高频感应电流iαh和iβh,由于ωe比ωh小得多,所以高频感应电流可以表示:
(4)
通过解调过程可以得到转子位置,如图1所示。通过高频注入在α,β轴上的电流分别乘以正弦函数和余弦函数,并结合转子估计位置θe和高频信号ωht。LPF用于过滤高频分量。当位置估计误差通过观测器收敛于零时,可以得到估计位置:
(5)

图1 常规位置估计方法的框图
从上面的信号处理中可以看出,在提取不同频率的信号时,需要使用高频滤波器和低频滤波器,但它们会降低位置估计的精度,也会降低控制性能。
2 高频方波注入控制策略优化
如文献[13-16]所述,高频方波注入静止坐标系可以使系统更可靠,而这些技术中没有考虑数字滤波器的负面影响。由于静止坐标系是存在耦合的,将单个信号注入α或β轴会在另一个轴上产生人工补偿。此外,如果注入正交正弦信号或平衡正弦信号,仍然需要使用高频滤波器或低频滤波器来提取信号。本文将正交方波电压注入静止坐标系可以在不受LPF影响的情况下估计转子位置。
注入信号的类型如图2所示。在α轴和β轴上分别注入两个正交的方波电压。数字系统采用单采样/更新方式,即采样周期和控制周期均与脉宽调制(PWM)载波周期相同。注入频率采用采样频率的四分之一,因为它是使方波电压正交的最高频率,也有利于下面将要讨论的位置估计。

图2 注入α,β轴的正交方波电压类型
新方案的框图如图3所示。在此方案中,通常用于传统方法的提取基波和高频电流的LPF可以被替换。

图3 正交方波电压注入法方框图
新方法只需要HPF,可以消除滤波器的相位误差。这种无传感器方法对数字滤波器和数字控制系统的不利影响很小,主要是进行了信号分离过程的特殊设计,如图4所示。

图4 信号分离过程框图
2.1 高频方波注入的数学原理
正交方波电压被傅里叶分解:
(5)
为了简化分析,在下面的计算中只考虑uαh和uβh的基频分量:
(6)
式中:uαh1和uβh1表示方波电压中的基频电压。
将式(6)代入式(3),可得高频感应电流:
(7)
高通滤波器得到高频电流:
(8)
式中:δ是高频脉冲带来的相位误差。
位置信息是由高频信号调制的,因此需要进行解调,解调信号选择为sin(ωht)和cos (ωht)。在数字控制系统中,参考电压和输出电压之间通常存在一个半采样周期的近似时间延迟。一个采样周期的延迟是由于不可避免地执行时间造成的,而大约半个采样周期的延迟是由于零阶保持器造成的。因此,实际注入电压与参考注入电压之间存在相移,解调信号sin(ωht)和cos(ωht)与实际高频感应电流相比也具有相同的相移。为了讨论相移如何影响位置估计,应在解调信号中考虑相移,将其重写为sin(ωht+φ)和cos(ωht+φ)进行分析。
然后将式(8)分别乘以这两个解调信号,可以将高频电流变换:

(9)
(10)
式中:iαβh_sin和iαβh_cos是α,β轴上的解耦电流。为简便起见,将式(9)和式(10)表示为复向量。
可以看出,式(9)和式(10)中的第一项包含相位误差的直流分量,交流分量包含转子位置。为了分别提取相位误差和转子位置,可以将上述4个公式相加或相减。另外,考虑到离散系统且注入电压的频率是采样频率的四分之一,ωht可以用0.5πn代替,其中n为离散序列的瞬时,新公式如下:
i1[n]=iαh_sin-iβh_cos=Kh[L0cos(πn+φ+δ)+L1cos(2θe-φ+δ)]
(11)
i2[n]=iαh_cos+iβh_sin=Kh[-L0sin(πn+φ+δ)+L1sin(2θe-φ+δ)]
(12)
i3[n]=iαh_cos-iβh_sin=Kh[L1sin(πn+φ+2θe+δ)-L0sin(φ-δ)]
(13)
i4[n]=iαh_sin+iβh_cos=Kh[-L1cos(πn+φ+2θe+δ)-L0cos(φ-δ)]
(14)
值得注意的是,所有公式都是由高频和低频分量组成的。在传统的方法中,使用LPF提取信号,导致相位误差,降低了性能。利用三角函数的周期特性,可以消除高频项,从而获得不使用滤波器的转子位置。该方法实施时电机的运行频率较低,因此在每个公式的离散时间序列中加入相邻项,可以去除高频项,则得到不使用LPF来消除的高频项:
i1=A1cos(2θe-φ+δ)
(15)
i2=A1sin(2θe-φ+δ)
(16)
i3=A2sin(φ-δ)
(17)
i4=A2cos(φ-δ)
(18)
式中:i1~i4为简化公式,A1= 2KhL1,A2= -2KhL0。

i1_p=cos(2θe-φ+δ)
(19)
i2_p=sin(2θe-φ+δ)
(20)
i3_p=sin(φ-δ)
(21)
i4_p=cos(φ-δ)
(22)
然后,通过三角变换和arctan函数来估计转子位置:
sin(2θe)=sin(2θe-φ+δ)cos(φ-δ)+cos(2θe-φ+δ)sin(φ-δ)
(23)
cos(2θe)=cos(2θe-φ+δ)cos(φ-δ)-sin(2θe-φ+δ)sin(φ-δ)
(24)
θe=0.5arctan[sin(2θe)/cos(2θe)]
(25)
通过以上简单的计算,可以消除PWM驱动器中和HPF中的数字延迟引起的相位误差。由于没有使用LPF来估计位置信息,系统运行性能良好。采用本文的无传感器控制方案可以基本消除数字滤波器和系统延迟带来的负面影响。
2.2 转子位置观测器的设计
在实际应用中,由于电流采样产生的噪声干扰和驱动器的非理想条件,转子位置不能简单地写成式(25)。因此,观测器被广泛用于消除噪声和获得高精度的位置信息。本文选择了基于机械特性设计的Luenberger观测器。
电机的力学运动方程可以写成:
(26)
式中:J为惯量;B为摩擦力;ωm为机械转子转速;Te为电磁转矩;TL为负载转矩;惯量J是通过离线测量来识别的,而摩擦力B往往被忽略。假设负载转矩TL在一个采样周期内变化较小,则建立全阶状态观测器:
(27)

式中:p是极对数;Kp,Ki,Kd是增益。Luenberger观测器经Laplace变换后的结构如图5所示。观测器的特征方程可以表示:
(28)

图5 Luenberger观测器的结构框图
根据特征值的选择来设置观测器参数。式(28)的根设为三重根,Kp= 3Jα2/p,Ki= -Jα3/p,Kd=-3α。根据Routh准则,如果α为负,该观测器将保持稳定,并且位置估计Δθ将收敛于零。因此,在位置估计中不会出现收敛失效。此外,虽然观测器需要的惯量J在电机运行时可能发生变化,但如果观测器的带宽设置较高,J的变化不会影响位置估计的性能。本文提出的无传感器方案更加可靠。
3 实验结果与分析
为验证本文的正交方波无位置传感器控制方法的可行性和有效性,用MATLAB/Simulink分别对有锁相环和改进的正交方波无位置传感器控制方法分别进行建模仿真,采样频率为10 kHz,并对结果进行比较和分析。IPMSM的主要参数如表1所示。

表1 电机主要参数
通过实验装置可以采集多工况下的电机转子位置、位置误差、转速等实验数据,并通过对比,可以较为直观地发现改进后方案的优点。
图6为电机空载转速为100 r/min时的三相电流曲线(以a相为例),图7为HPF提取的α,β轴高频电流曲线(以α相为例),图8为通过解耦计算得到的正交位置信号。可以看出,相电流被高频电流调制。通过HPF可以很好地提取出包含位置信息的高频电流,在不使用LPF提取信号的情况下也能准确地估计出正交位置信号。

图6 a相电流波形

图7 HPF提取的高频电流曲线

图8 解耦的正交位置信号
3.1 空载状态
在空载状态下给定转速100 r/min,如图9所示。虚线为真实的转子位置波形,实线为改进后得到估计转子位置波形。图10为对比两波形后的误差。可以看出,改进后的方法能够及时地跟踪转子位置,误差也在一定的微小范围内。

图9 转子位置波形
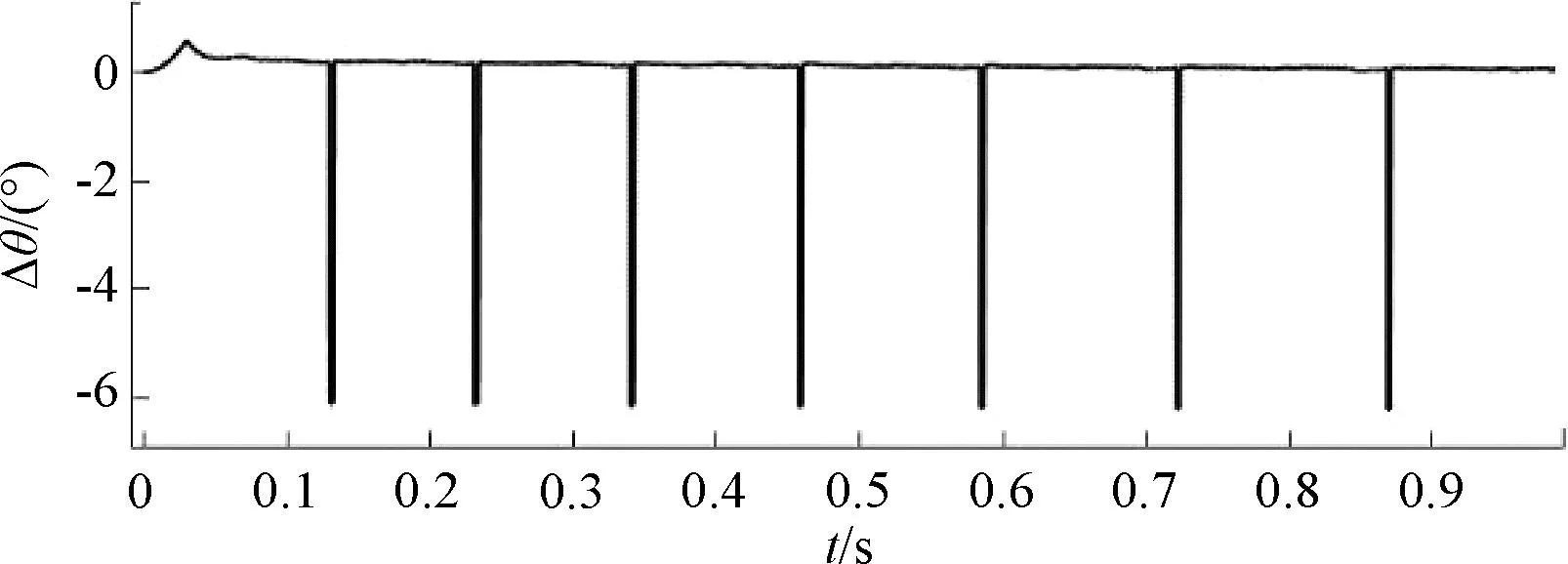
图10 转子位置误差
转速波形如图11所示。细线为电机控制系统改进前的转速波形,粗线为电机控制系统改进后的转速波形。可以看出,改进方法能够抑制超调,并且转速波形更加平稳。
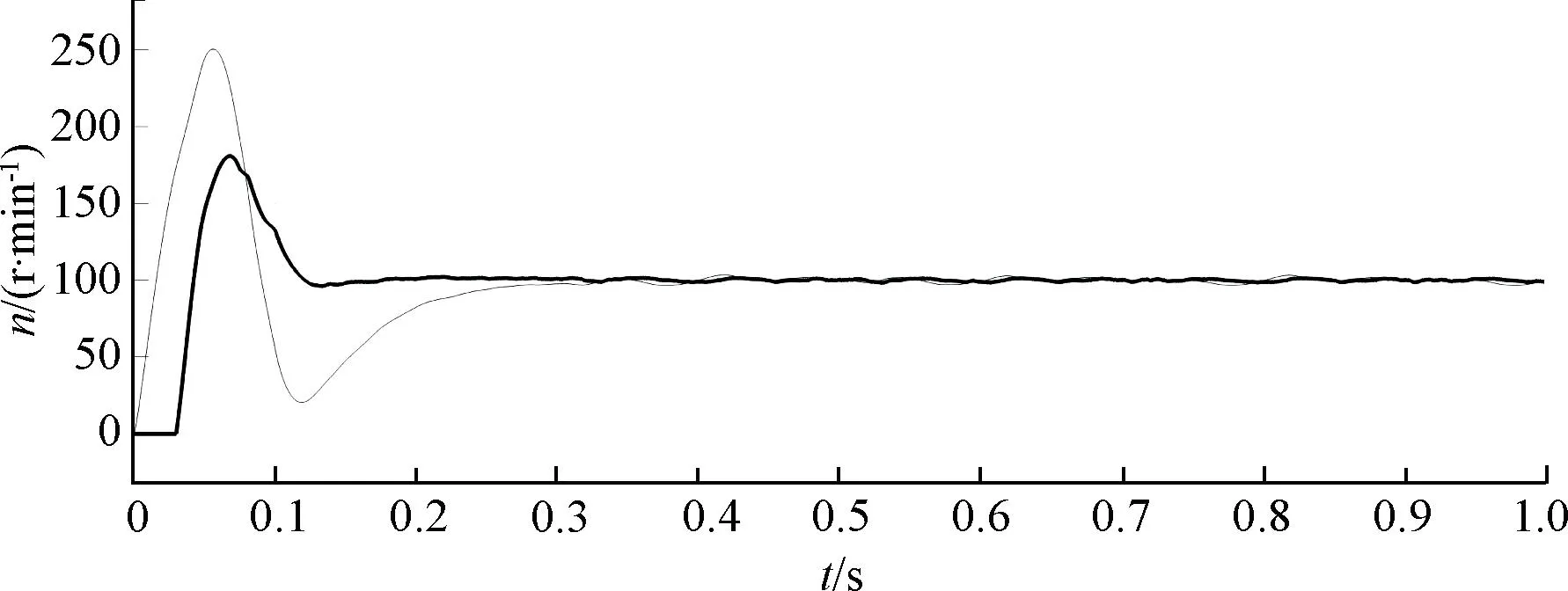
图11 转速波形
3.2 突加减负载
在给定转速100 r/min的情况下,由空载状态给电机增加负载,在1 s时从0 增加到5 N·m,并在2 s时从5 N·m减小到0,如图12所示。可以明显看出,在突加减负载之后,采用改进方法的波形更加稳定,超调时间也更加短。转子位置如图13所示,转子位置检测基本没有变化,效果比较好。

图12 突加减负载后转速波形

图13 突加减负载后转子位置
3.3 突加减速
在给定转矩5 N·m的情况下,对电机进行加减速。在1 s时从100 r/min增加到150 r/min,并在2 s时从150 r/min减少到100 r/min,如图14所示,可以明显看出,在突加减速之后,采用改进方法的显波形更加稳定,超调时间也更加短。转子位置如图15所示。转子位置检测基本没有变化,效果比较好。
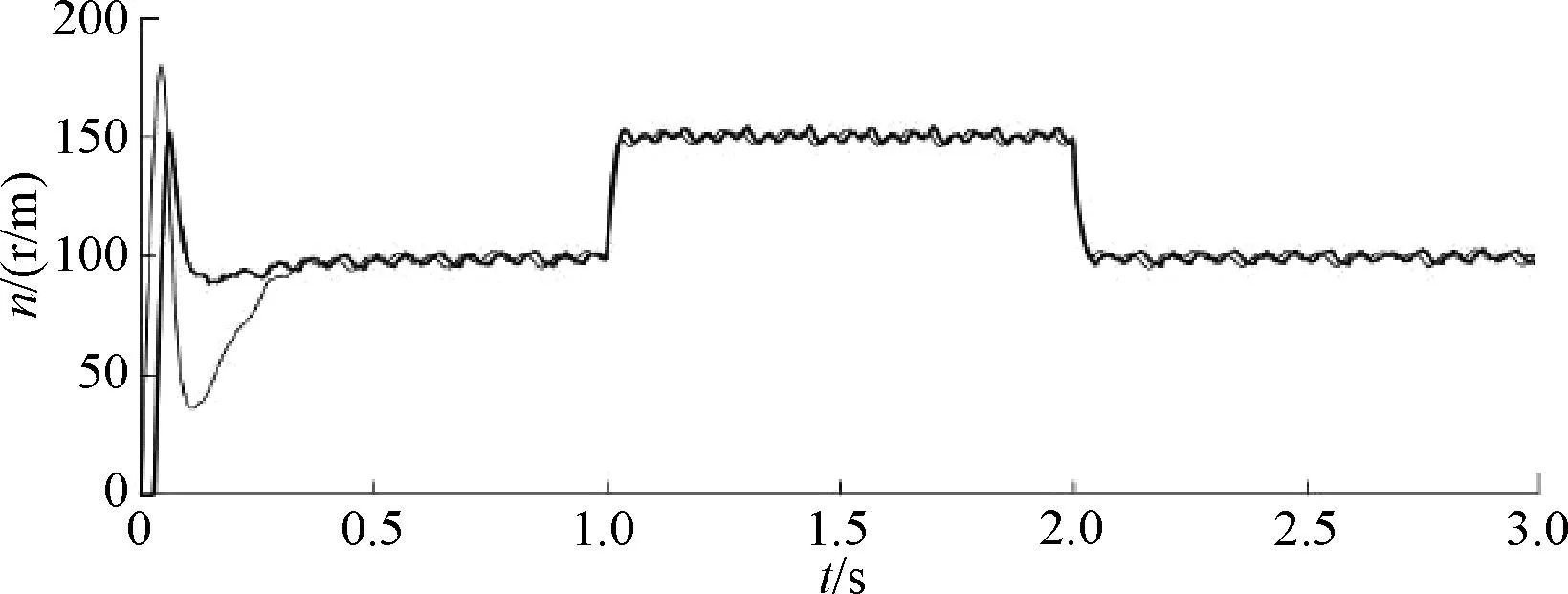
图14 突加减速后转速波形
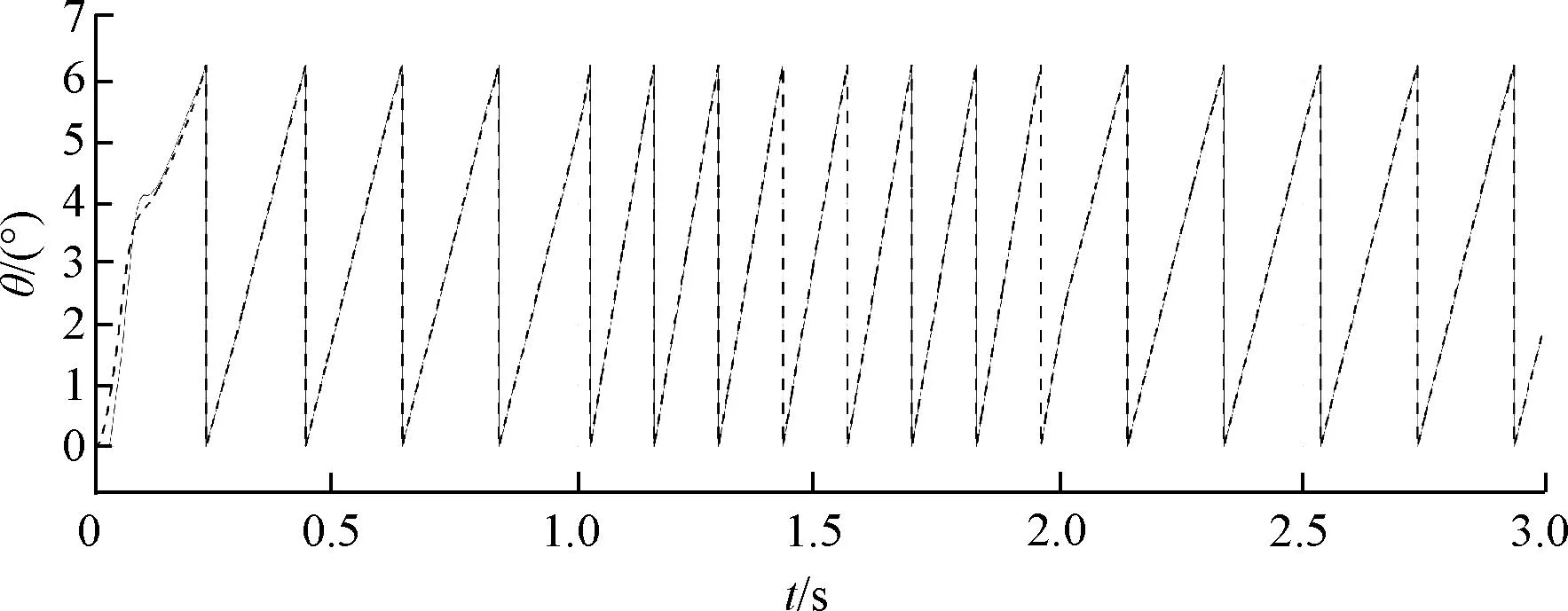
图15 突加减速后转子位置
4 结 语
本文提出一种将高频正交方波电压注入静止坐标系的IPMSM无传感器方案。利用注入电压的频率特性建立信号处理。可以在不需要LPF的情况下估计转子位置,并且可以消除基于PWM的系统所带来的HPF和数字延迟的不利影响。通过仿真实验可知,与传统的方波电压注入方法相比,可以得出以下结论:
1)正交方波电压的注入频率更高,也可以提高位置估计的精度,并且位置精度误差在0.001 75°左右。
2) 该方法具有较好的稳定性,突加突减负载波动更小,稳定在±2 r/min左右,突加减速对的转速波动也更小,稳定在±2 r/min左右。
3) 改进的高频正交方波注入的无位置传感器控制方法能够保证传统高频注入法的良好性能,同时成功提高了系统带宽,控制精度更高。
猜你喜欢
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电镀与环保(2016年3期)2017-01-20
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
深圳大学学报(理工版)(2015年5期)2015-02-28
电测与仪表(2014年11期)2014-04-04