
基于磁悬浮理论的自适应抗拔摩擦摆隔震支座力学性能研究
2024-04-12 09:24李晓东吴健张天允
地震工程学报 2024年1期
李晓东 吴健 张天允

摘要:为解决摩擦摆隔震支座抗拔能力不足的问题并优化其隔震性能,将传统的摩擦摆支座(FPB)和半主动控制思想相结合,提出一种自适应磁悬浮抗拔摩擦摆隔震支座(AMFPB)。基于磁路理论进行理论分析,推导出U型电磁铁的电磁力公式,以及AMFPB刚度、周期和等效阻尼比计算公式;对U型电磁铁进行位移-电磁力试验分析,建立AMFPB有限元模型,并对不同位移幅值、不同电磁铁匝数和输入电流下支座的滞回特性和抗拔性能进行分析。研究结果表明:U型电磁铁的位移-电磁力试验结果与理论结果吻合度较好,计算得到的AMFPB滞回曲线与数值模拟结果基本相同。AMFPB随滑动位移的增加可调节自身的刚度及耗能,有利于支座位移的控制。
关键词:隔震; 摩擦摆支座; 磁悬浮; 滞回性能
中图分类号: TU391 文献标志码:A 文章编号: 1000-0844(2024)01-0050-09
DOI:10.20000/j.1000-0844.20220617001
Mechanical properties of the adaptive uplift-restraint friction pendulum bearing based on the magnetic levitation theory
Abstract: The problem of insufficient pullout capacity in a friction pendulum bearing and the need to optimize its vibration isolation performance led to the proposal of an adaptive magnetic levitation uplift-restraint friction pendulum bearing (AMFPB). This novel solution was developed by integrating the traditional FPB with semi-active control concepts. A theoretical analysis of the AMFPB was performed based on magnetic circuit theory. The analysis resulted in deriving the electromagnetic force formula for the U-shaped electromagnet. Additionally, formulas for calculating the stiffness, period, and equivalent damping ratio of the AMFPB were established. To further validate these theories, a displacement-electromagnetic force test was conducted on the U-shaped electromagnet. Concurrently, a finite element model of the AMFPB was established to analyze the hysteretic characteristics and pullout performance of the AMFPB under different displacement amplitudes, electromagnet turns, and input currents. The displacement-electromagnetic force test results of the U-shaped electromagnet matched the theoretical findings. Moreover, the calculated hysteretic curve of the AMFPB closely mirrored the numerical simulation result. A standout feature of the AMFPB is its ability to adjust its own stiffness and energy consumption in response to an increase in sliding displacement. This unique characteristic makes the AMFPB advantageous in controlling bearing displacement.
Keywords:seismic isolation; friction pendulum bearing; magnetic levitation; hysteretic behavior
0 引言
目前,在隔震結构中通常采用滑动摩擦支座和橡胶隔震支座。其中,摩擦摆隔震支座(Friction Pendulum Bearing,FPB)由于构造简单、自复位能力强、竖向承载力高、耐久性好等优点,被广泛应用于各大工程中。国内外学者对其进行了许多研究:夏修身[1]提出了针对铁路连续梁拱组合体系的摩擦摆设计方法,并建立了全桥计算模型,研究表明摩擦摆支座可以显著减小结构顺桥向的最大地震弯矩及拱顶变形;彭文礼等[2]以靖远金滩黄河大桥矮塔斜拉桥为分析模型,利用摩擦摆式减隔震支座对矮塔斜拉桥的墩身进行减隔震研究,结果证明了在矮塔斜拉桥中应用摩擦摆减隔震支座系统的有效性。但由摩擦摆支座的构造特点可知,传统摩擦摆隔震支座不具备应对外部激励的自适应能力和抗拔能力。针对此点,国内外学者先后提出了各种自适应摩擦摆隔震支座[3-7]与抗拔摩擦摆隔震支座[8-11]等解决方案。
磁悬浮概念是Earn-show于1842年首次提出的[12]。经过多年的发展,磁悬浮技术已在航天航空、交通运输[13]等领域得到了广泛应用。1986年以来,磁悬浮技术因具有无接触式出力、出力稳定、出力大小可控的独特优势,被用于主动、半主动减隔震装置的制作,从而在土木工程领域备受关注[12]。目前国内外学者已研发了多种基于磁悬浮技术的结构减隔震装置,如黄东鑫等[14]提出了一种基于磁悬浮的竖向隔震装置;夏昌等[15-16]提出了一种磁悬浮的三维隔震装置。
然而,已有措施均无法将摩擦摆支座的两种缺陷一并解决,且磁悬浮技术在结构减隔震领域的应用仍需深入研究。为此,本文提出一种采用三态控制[17]的自适应磁悬浮抗拔摩擦摆隔震支座(Adaptive Magnetic Levitation Uplift-restraint Friction Pendulum Bearing,簡称AMFPB),将FPB用作基本隔震耗能部件,在其中设置电磁力可控的U型电磁铁,并对U型电磁铁进行吸力试验,然后对AMFPB进行理论推导和数值模拟研究,分析其滞回特性及隔震耗能机理,检验将U型电磁铁用于改善FPB自适应能力和抗拔能力的可行性与有效性。
1 AMFPB的构造及耗能机制
1.1 构造设计
如图1所示,AMFPB由顶板、底板、滑块、控制系统及U型电磁铁组成。其中,底板顶面和顶板底面均为凹形球形滑动面,滑块顶面和底面均为外凸的球形滑动面,且底板顶面和滑块底面、顶板底面和滑块顶面的球面曲率半径相同。U型电磁铁与顶板的底面用螺栓固定连接并呈环形分布,U型电磁铁的上表面和四周均设置隔磁装置,使其产生的磁场不会对摩擦摆的其余部分产生影响。
1.2 隔震耗能机制
在受到地震作用激励时,初始未通电的U型电磁铁不会阻碍AMFPB的正常启动。一旦地震激励作用超过滑块受到的静摩擦力,AMFPB启动,位移传感器检测到顶板发生位移,控制系统生效并激活电源。通过控制系统判断,改变U型电磁铁的输入电流,以改变U型电磁铁产生的电磁力,进而改变摩擦摆支座的刚度和阻尼,增加支座的耗能能力。系统采用的三态控制如式(1)所示:
式中:I为U型电磁铁输入电流,imin、imed和imax分别对应小、中、大三档输入电流;d为支座水平位移,d0为支座位移的初始值(初始位移为0),dmin、dmed和dmax分别对应支座的不同界限位移(对应为小、中、大);fc为U型电磁铁产生的电磁力,fc.min、fc.med、fc.max分别对应小、中、大三档电磁力。
2 U型电磁铁的力学性能分析
2.1 U型电磁铁结构
本文采用的U型电磁铁由U型铁心、线圈和衔铁三部分组成,结构示意图见图2。在电磁铁线圈中通入直流电后,线圈周围产生磁场,位于磁场内的铁心被磁化,由线圈流出的磁力线穿过铁心、工作气隙和衔铁,形成闭合磁回路,产生磁吸力。
2.2 电磁铁吸力理论分析
U型电磁铁的系统磁路和简化磁路图如图3所示。图中:N为线圈的匝数;i为直流电流输入;S为U型铁心的横截面面积;Z为工作气隙的长度;iN为线圈磁势;UZ为工作气隙上磁位降;Ut为铁心和衔铁部分的磁位降;RZ为工作气隙的磁阻;Rt为铁心和衔铁部分的磁阻。因为铁心和衔铁部分的相对磁导率是空气磁导率的几千倍,所以U型电磁铁的UZ远大于Ut,线圈磁势几乎等于工作气隙上磁位降。利用虚位移原理可以推导出电磁力的计算公式。
U型电磁铁的磁路定律如式(2)所示:
U型电磁铁的磁感应强度B如式(3)所示:
假设工作气隙中储存的能量为W:
对式(4)中工作气隙长度Z求导,可得出U型电磁铁的电磁力C:
将式(3)代入式(5),可得:
式中:φ为U型铁心的横截面磁通量;μ0为真空的磁导率,μ0=4π×10-7(H/m);μr为相对磁导率,空气的相对磁导率μr≈1 (H/m);V为工作气隙部分的体积;L为磁路的平均长度。
2.3 U型电磁铁试验
2.3.1 试验概况
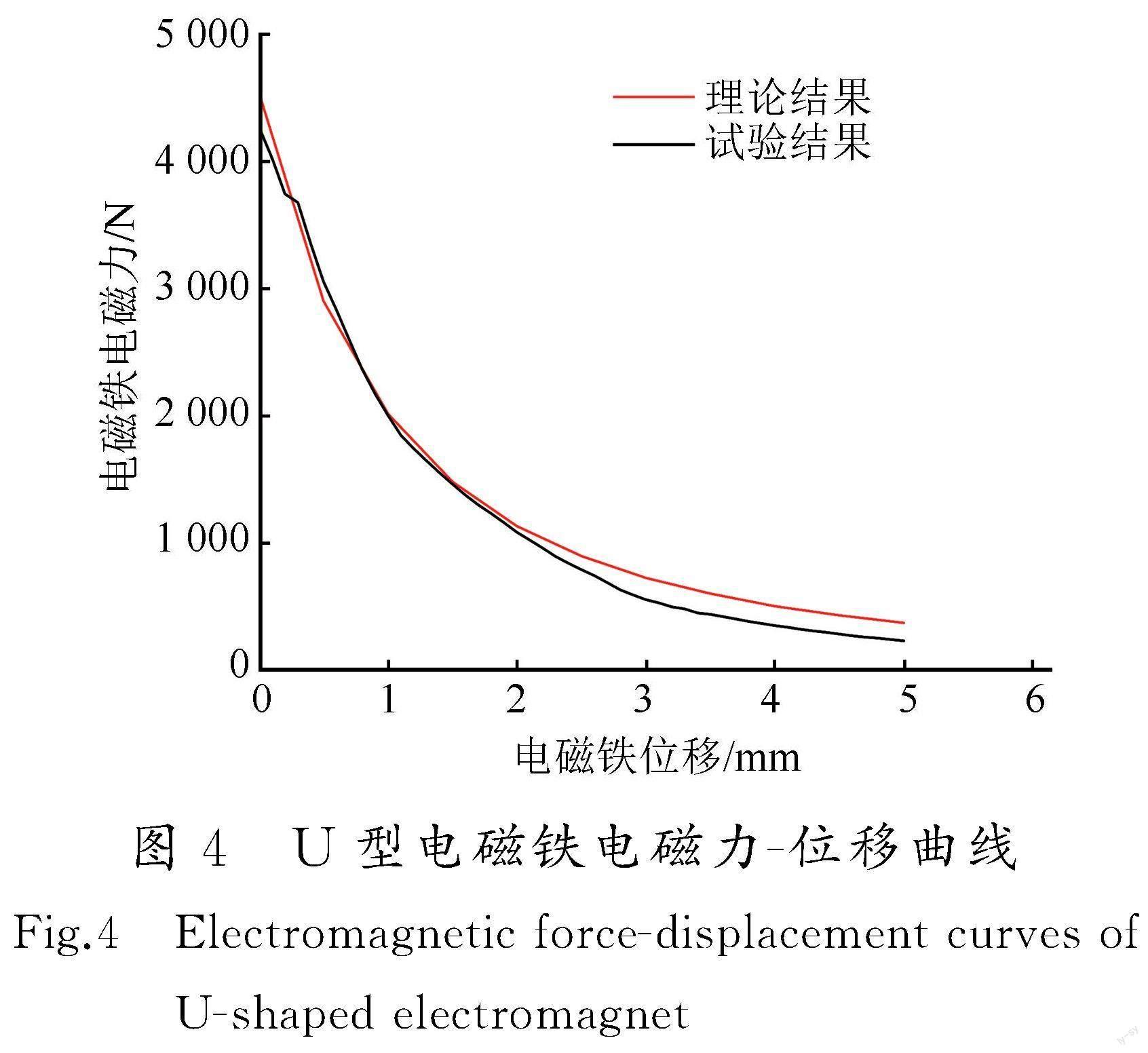
为验证U型电磁铁理论分析得出的电磁力公式的准确性,有必要对其进行试验分析。采用拉力测试器对U型电磁铁进行电磁力特性试验,电磁铁的尺寸如图2所示,其匝数为600匝,初始位移为2 mm,位移幅值为5 mm,加载方式为线性位移加载,输入电流为5 A。
2.3.2 试验结果及分析
将U型电磁铁的理论计算结果和试验结果进行对比,结果如图4所示。由图4可以看出,理论结果与试验结果相吻合;在曲线后半段,试验数据低于理论数据,产生这种现象的主要原因是线圈持续发热,导致线圈的电阻变大并制造误差。当U型电磁铁的形状参数、输入电流和匝数一定时,电磁力的大小随着电磁铁位移的增大呈非线性减小的趋势,所以应当选取合理的工作行程,保证电磁铁的出力能满足AMFPB的需求。
2.4 U型电磁铁数值模拟
2.4.1 模型建立
采用磁场、多体动力学、动网格三物理场全耦合的方式在有限元仿真软件中建立与试验试件尺寸、材性和加载方式完全一致的三维电磁铁模型。模型由U型铁心、线圈域、衔铁和空气域组成。线圈域采用铜材料,铁心和衔铁采用高导磁的电工纯铁材料,空气和铜材料的μr设置为1,电工纯铁材料的μr设置为7 000。在磁场中设置与试验一致的电流和线圈匝数,并规定电流方向,因为本文研究的是电磁铁距离变化的动态电磁力,所以磁场中要进行磁矢势规范的固定。位移设置与试验一致,动网格设置空气域为变形域,衔铁与空气域的接触面设置和衔铁的运动一致。网格设置为自由四面体网格,对铁心、线圈域和衔铁进行局部加密。求解器设置为先进行稳态计算,之后再以稳态计算结果作为瞬态计算的初始值进行瞬态计算。
2.4.2 仿真结果分析
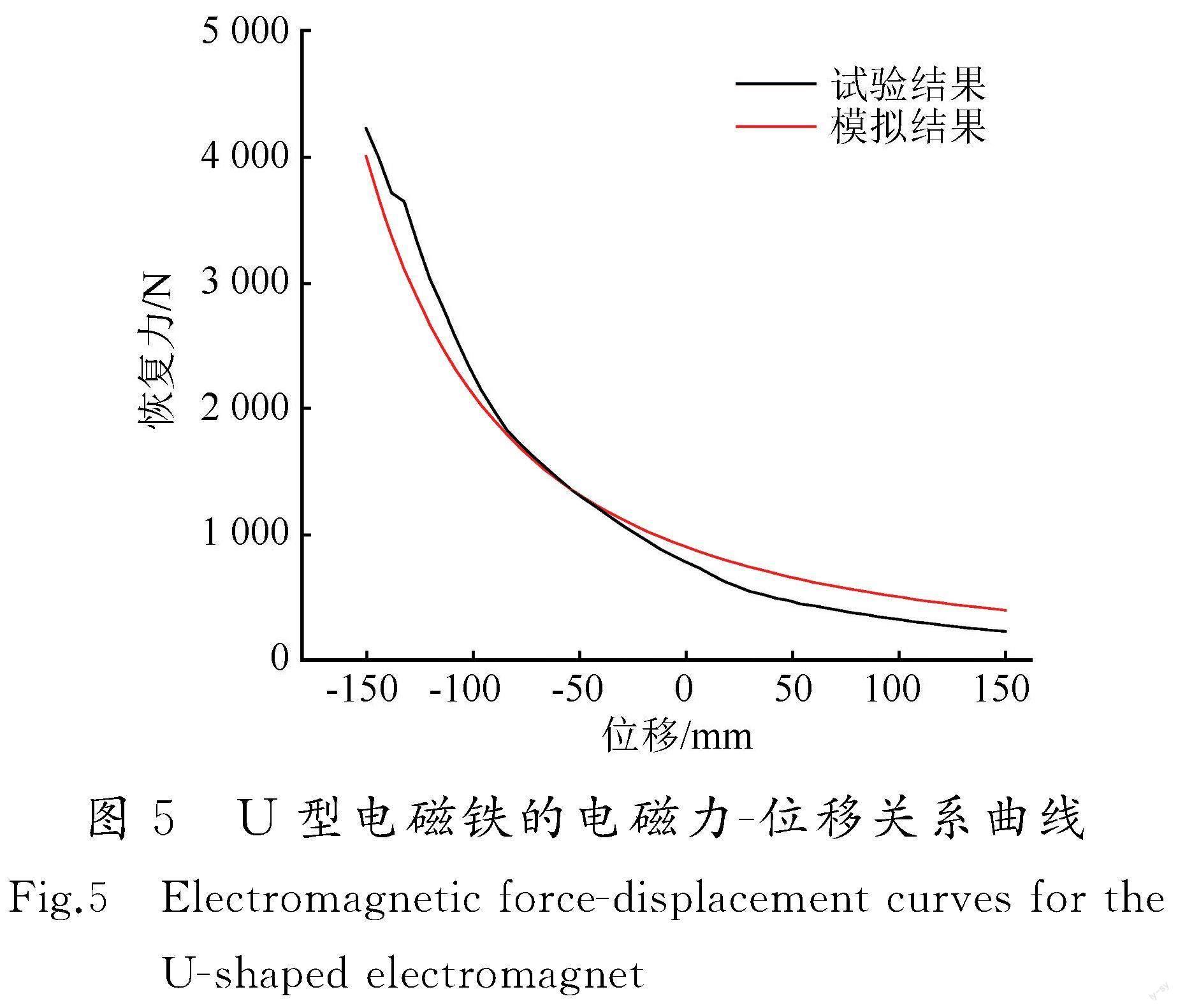
U型电磁铁电磁力与位移关系的试验与模拟曲线如图5所示。仿真结果中的电磁力与试验结果在工作行程范围内基本一致,试验结果与仿真结果相吻合。由此可知,建立的U型电磁铁模型与实际相符,可以反映电磁铁的位移-力特性。
由于电磁铁和铁心的体积一定,所以在有限的体积内,线圈的最大匝数为1 200。根据上述U型电磁铁形状参数和材料参数,线圈匝数在0~1 200范围内以50匝为步长进行取值,分别计算不同匝数的U型电磁铁的电磁力。当U型电磁铁和衔铁之间的距离为2 mm、线圈的电流均为10 A时,U型电磁铁的电磁力与线圈匝数之间的关系如图6所示。可以看出,电磁力的大小随着线圈匝数的增大呈非线性增大的趋势。再结合经济因素和长时间通电线圈散热方面的考虑,最终选取線圈匝数为1 000匝。
3 AMFPB理论
3.1 AMFPB的电磁铁电吸力
对地震作用下的支座进行受力分析,AMFPB力学简图如图7所示。图中:θ表示滑块相对于圆弧面竖向对称轴运动的转角,以逆时针为正;W为支座承受的竖向压力;D=Rsinθ,为滑动面中滑块的水平位移,其中R为圆弧面的半径;P=(W+CX)cosθ,为滑块对滑动面的正压力;f=μNsgn(),为滑块所受的摩擦力,其中μ为滑块的动摩擦系数,符号函数为:
在地震作用下,滑块在滑动面上滑动,则滑块相对于初始位置的竖向位移L为:
顶板下部U型电磁铁的电磁力CX为(以竖直向下为正):
将式(8)代入式(9),得:
式中:A为U型电磁铁的数量;N为U型电磁铁线圈的匝数。
3.2 刚度、周期和等效阻尼比
由滑块受力平衡,对O点取矩,点∑Mo=0,即:
FRcosθ-(W+CX)×D-fR=0 (11)
则AMFPB的水平恢复力F为:
当θ很小时,式(12)可以简化为:
由式(13)可知,AMFPB的刚度Kfps为:
由理论分析得到式(14)和AMFPB各向对称性,可以构造出AMFPB的滞回模型(图8)。
由滞回模型可得到支座的等效刚度Keff和等效阻尼比ζeff为:
式中:Dd为AMFPB的设计位移。
3.3 等效自振周期
假设AMFPB上部结构的刚度为Km,则隔震结构的等效刚度Ke为:
对于隔震建筑,上部结构刚度远大于隔震层刚度,所以隔震结构的等效刚度约等于隔震层刚度。因此,应用AMFPB的隔震结构的等效自振周期T为:
式中:g为重力常数。
可以看出,AMFPB隔震体系的自振周期不仅与其半径R、W、μ和Dd有关,还与CX有关,所以AMFPB可以通过控制输入电流的大小,改变结构的自振周期。
4 AMFPB的数值模拟
4.1 有限元模型的建立
为了研究AMFPB在低周往复荷载作用下的滞回性能与设计位移下的恢复能力,并验证理论分析所得出的恢复力公式、等效刚度公式和滞回模型的正确性,采用有限元软件对AMFPB进行实体建模。U型电磁铁形状参数和材料参数均与第2节中电磁铁参数完全一致,初始位移设为2 mm,各材料的力学性能参数列于表1。摩擦摆部分底板上滑动面及滑块的球铰面采用自由三角形网格并进行加密,其余部分采用自由四边体网格。U型电磁铁模拟部分与2.4节完全一致
由于U型电磁铁外围有隔磁装置,AMFPB的其他部分不会受到磁场的影响,因此U型电磁铁部分和AMFPB摩擦摆部分分开模拟。AMFPB摩擦摆部分采用多体动力学模块,U型电磁铁部分采用磁场、多体动力学和动网格三重物理场耦合。由于本文重点研究AMFPB的滑移滞回性能,故将支座控制在弹性受力状态,AMFPB部分的底板、顶板滑动面,以及上、下球铰面之间的接触面均设置接触对,底板顶面和滑块底面之间的接触设置为摩擦型接触,顶板底面和滑块顶面之间的接触设置为球关节型接触。
4.2 模型参数的取值
AMFPB底板直径为1 000 mm,顶板直径1 100 mm,高300 mm;滑块直径为700 mm,高250 mm;衔铁内径720 mm,外径1 400 mm,高300 mm。AMFPB底板顶面和滑块底面的曲率半径取2 000 mm,顶板底面和滑块顶面的曲率半径取500 mm。在AMFPB顶板上施加水平向简谐位移激励S=Asin(2πft),并在其上表面上施加竖直向下的荷载,f=0.1 Hz,控制方式如1.2节中式(1)所示,其中界限位移d0、dmin、dmed和dmax分别取0 mm、50 mm、100 mm和150 mm。为研究AMFPB力学参数变化对支座力学性能的影响,设置了如表2所列的几种工况。
4.3 仿真结果及分析
4.3.1 AMFPB水平位移-竖向位移关系
由理论分析和仿真模拟得出的AMFPB-1的水平位移-竖向位移曲线如图9所示,可以看出理论结果与模拟数据基本一致。仿真结果表明支座底板顶面的几何形状是导致竖向位移随水平位移变化的主要因素,其他因素影响不大。
4.3.2 滞回性能
将理论分析和仿真模拟得出的AMFPB-1的恢复力-位移曲线进行对比分析,结果如图10所示,可以看出理论与模拟数据基本一致,数值结果与仿真结果相吻合。
将工况FPB和AMFPB-1的恢复力-位移曲线进行对比分析,结果如图11所示。可见AMFPB的滞回环面积明显比传统FPB大,AMFPB的耗能能力远超FPB。
将AMFPB-1和AMFPB-4的恢复力-位移曲线进行对比分析,结果如图12所示。可见当位移较小时,AMFPB的滞回曲线呈双线性,随着水平位移幅值的增大,支座的恢复力明显呈阶段性增大。这表明AMFPB随滑动位移的增加可调节自身的刚度及耗能,有利于支座位移的控制。
將AMFPB-1和AMFPB-2的恢复力-位移曲线进行对比分析,结果如图13所示。由图可见,随着竖向荷载的增大,AMFPB启动时所需的荷载提升,表明水平滑动摩擦力增大,滞回环愈发饱满。
将AMFPB-1和AMFPB-5的恢复力-位移曲线进行对比分析,结果如图14所示。由图可见,输入电流取值越大,AMFPB滞回环愈发饱满,表明输入电流取值越大,U型电磁铁所能提供的控制力越大,AMFPB的刚度和耗能也就越大。
将AMFPB-1和AMFPB-3的恢复力-位移曲线进行对比分析,结果如图15所示。由图可见,U型电磁铁匝数取值越大,AMFPB滞回环越饱满,表明其匝数取值越大,U型电磁铁所能提供的控制力越大,AMFPB的刚度和耗能也就越大。
4.4 应力分析
为保证支座始终处于弹性状态下工作,对AMFPB-1进行应力分析。支座运动过程中,电磁铁所受最大应力发生在顶板与U型电磁铁的连接位置,此时其输入电流刚达到imax,应力云图如图16(a)所示。由图16(a)可知,最大应力为2.31 MPa。因此,设计时应选择合适的连接方式和螺栓尺寸,以保证支座正常工作时U型电磁铁不会脱落。支座在位移达到最大时,其内部滑块所受应力最大,此时应力云图如图16(b)所示。由图16(b)可知,受挤压作用最大应力出现在支座球铰面挤压处。因此,设计时应选择合适的球铰面尺寸,以保证支座始终处于弹性状态下工作。
4.5 抗拔能力分析
将工况AMFPB-1和AMFPB-5下U型电磁铁的电磁力-位移曲线进行对比分析,结果如图17所示。由图可见,U型电磁铁输入电流越大,支座所具有的抗拔能力越强,其抗拔能力在支座位移达到dmin时最小。将工况AMFPB-1和AMFPB-3下U型电磁铁的电磁力-位移曲线进行对比分析,如图18所示。由图可见,U型电磁铁匝数越大,支座所具有的抗拔能力越强。
5 结论
本文将传统的摩擦摆支座和半主动控制思想相结合,提出了一种新型的自适应磁悬浮抗拔摩擦摆隔震支座,并进行相关研究,得出以下结论:
(1) 提出了U型电磁铁吸力公式,所得理论结果与模拟结果和试验结果相吻合。
(2) 提出的AMFPB滞回性能的理论解可作为工程实际中AMFPB设计时的理论依据。
(3) 随竖向荷载、电磁铁匝数和输入电流的增大,AMFPB在同一位移幅值下的滞回曲线有明显扩张,引起等效刚度和单位循环耗能的增加,其运动过程中的最大应力出现在支座球铰面挤压处。
(4) AMFPB支座在全部工况下的滞回曲线呈锯齿状且饱满,其耗能及限位控制水平优于传统的FPB。AMFPB具有良好的抗拔能力,其抗拔能力取决于限界位移、U型电磁铁的匝数和输入电流的取值。
参考文献(References)
[1] 夏修身.铁路连续梁拱组合桥基于摩擦摆支座的减隔震研究[J].西北地震学报,2012,34(4):350-354.
XIA Xiushen.Seismic isolation of combined system of continuous girder-arch railway bridge using friction pendulum bearing[J].Northwestern Seismological Journal,2012,34(4):350-354.
[2] 彭文礼,季日臣.摩擦摆支座在矮塔斜拉桥中减震效果研究[J].地震工程学报,2021,43(1):213-218.
PENG Wenli,JI Richen.Vibration reduction effect of friction pendulum bearings in low-tower cable-stayed bridges[J].China Earthquake Engineering Journal,2021,43(1):213-218.
[3] 庄鹏,孙仕琦,韩淼.SMA拉索-复摩擦摆隔震支座性能试验研究[J].建筑结构学报,2021,42(增刊2):482-489.
ZHUANG Peng,SUN Shiqi,HAN Miao.Experimental study on performance of SMA cable-complex friction pendulum isolation bearing[J].Journal of Building Structures,2021,42(Suppl02):482-489.
[4] 洪越,唐贞云,林树潮,等.一种新型变曲率摩擦摆力学性能的试验研究[J].工程力学,2018,35(增刊1):113-119.
HONG Yue,TANG Zhenyun,LIN Shuchao,et al.Experimental study on mechanical properties of a new type of variable curvature friction pendulum[J].Engineering Mechanics,2018,35(Suppl01):113-119.
[5] 周云,龚健,邓雪松.变曲率摩擦复摆隔震支座的简化分析与数值仿真[J].工程力学,2012,29(7):163-171,185.
ZHOU Yun,GONG Jian,DENG Xuesong.Simplified analysis and numerical simulation of double variable curvature friction pendulum isolation bearing[J].Engineering Mechanics,2012,29(7):163-171,185.
[6] 邓雪松,龚健,周云.变曲率摩擦摆隔震支座理论分析与数值模拟[J].土木建筑与环境工程,2011,33(1):50-58.
DENG Xuesong,GONG Jian,ZHOU Yun.Theoretical analysis and numerical simulation of variable curvature friction pendulum isolation bearing[J].Journal of Civil,Architectural & Environmental Engineering,2011,33(1):50-58.
[7] 张亚飞,谭平,尚继英,等.变摩擦摆隔震支座力学性能研究[J].振动工程学报,2020,33(6):1122-1130.
ZHANG Yafei,TAN Ping,SHANG Jiying,et al.Mechanical properties of variable friction pendulum system[J].Journal of Vibration Engineering,2020,33(6):1122-1130.
[8] 李晓东,王文渊.抗拔型三重摩擦摆隔震支座数值模拟研究[J].工程抗震与加固改造,2016,38(6):85-88.
LI Xiaodong,WANG Wenyuan.Study on numerical simulation of uplift resistance triple friction pendulum isolation bearing[J].Earthquake Resistant Engineering and Retrofitting,2016,38(6):85-88.
[9] 孙新豪,谢强,李晓璇,等.带有滑动摩擦摆支座的500 kV变压器地震响应[J].高电压技术,2021,47(9):3226-3235.
SUN Xinhao,XIE Qiang,LI Xiaoxuan,et al.Seismic response of a 500 kV transformer with friction pendulum isolation bearing[J].High Voltage Engineering,2021,47(9):3226-3235.
[10] 王偉强,曹志峰,卜继玲,等.抗拔型摩擦摆支座力学性能试验研究[J].铁道建筑,2016,56(11):38-41.
WANG Weiqiang,CAO Zhifeng,BU Jiling,et al.Experimental study on mechanical performance of uplift-resistance-type friction pendulum bearing[J].Railway Engineering,2016,56(11):38-41.
[11] 曾亚,薛素铎,李雄彦.抗拔摩擦摆支座竖向刚度的确定及其在网壳中的隔震分析[J].工业建筑,2015,45(11):40-44.
ZENG Ya,XUE Suduo,LI Xiongyan.Determination of vertical stiffness for RUP-FPS and seismic isolation in lattice shell structure[J].Industrial Construction,2015,45(11):40-44.
[12] 潘毅,周盟,郭瑞等.基于磁悬浮技术的建筑隔震研究进展[J].西南交通大学学报,2019,54(3):475-482.
PAN Yi,ZHOU Meng,GUO Rui,et al.Research progress on building isolation based on electromagnetic levitation techniques[J].Journal of Southwest Jiaotong University,2019,54(3):475-482.
[13] 程建峰,苏晓峰.磁悬浮列车的发展及应用[J].铁道车辆,2003,41(11):14-17,1.
CHENG Jianfeng,SU Xiaofeng.Development and application of magnetic levitation trains[J].Rolling Stock,2003,41(11):14-17,1.
[14] 黄东鑫,费树岷.单跨简支梁竖向振动的磁悬浮半主动控制[J].防灾减灾工程学报,2009,29(5):513-517.
HUANG Dongxin,FEI Shumin.Magnetic levitation semi-active control of vertical vibration for a simply supported beam[J].Journal of Disaster Prevention and Mitigation Engineering,2009,29(5):513-517.
[15] 夏昌,傅大宝,黄滨.磁悬浮技术在结构减振控制中的应用[J].地震工程与工程振动,2014,34(1):211-216.
XIA Chang,FU Dabao,HUANG Bin.Application of magnetic levitation technique in structural vibration control[J].Earthquke Engineering and Engineering Dynamics,2014,34(1):211-216.
[16] 夏昌,傅大宝,刘少克.基于电磁悬浮技术的结构竖向隔震系统研究[J].土木工程学报,2014,47(增刊1):197-201.
XIA Chang,FU Dabao,LIU Shaoke.Research on vertical isolation system of structure based on electromagnetic levitation technology[J].China Civil Engineering Journal,2014,47(Suppl01):197-201.
[17] 徐赵东,沈亚鹏.磁流变阻尼结构的双态控制和三态控制弹塑性分析[J].西安交通大学学报,2003,37(7):754-758.
XU Zhaodong,SHEN Yapeng.Elastoplastic analysis for magnetorheological structure under bi-state control and tri-state control[J].Journal of Xi'an Jiaotong University,2003,37(7):754-758.
猜你喜欢
小学科学(2023年5期)2023-03-15
建材发展导向(2022年12期)2022-08-19
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
中华建设(2019年4期)2019-07-10
西南交通大学学报(2018年6期)2018-12-18
军事文摘(2017年16期)2018-01-19
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
建材发展导向(2016年3期)2016-05-23
