基于实际出行场景的整车驾控性能测试与评价
2024-04-18 10:28王长青孟云龙雷斌梁荣亮
汽车文摘 2024年4期
王长青 孟云龙 雷斌 梁荣亮
【摘要】为了直观地评价中国消费者实际出行场景的整车驾控性能,提出一种驾控性能测试与评价方法。根据中国路况,结合工程经验与国家标准,选择驾控性能测试工况与测试工况中的评价指标及其权重,选取3款车型在测试工况下进行道路试验,通过数据分析得出指标限值。结果表明,3款车型的驾控性能得分与车辆级别、能源类型相关,且与驾驶员主观驾驶感受一致,说明此驾控性能测试与评价方法具有可行性与准确性,可以为开发或验证阶段的工程样车进行整车驾控性能的策略标定及验证测评。
关键词:出行场景;驾控性能;客观评价方法;动力驾驶性;制动性能;操纵稳定性
中图分类号:U467.1 文献标志码:A DOI: 10.19822/j.cnki.1671-6329.20230125
Vehicle Driving Control Performance Test and Evaluation Based on Actual Travel Scenarios
Wang Changqing1,Meng Yunlong2,Lei Bin1,Liang Rongliang1
(1.CATARC Automotive Test Center (Tianjin) Co., Ltd, Tianjin 300300; 2.Hebei University of Technology, Tianjin 300400)
【Abstract】 In order to intuitively evaluate the driving control performance of the vehicle based on the actual travel scenarios of Chinese consumers, this paper proposes a driving control performance testing and evaluation method. According to Chinese road conditions, combined with engineering experience and national standards, driving control performance test conditions and the evaluation indexes and weights in the test conditions are selected. Three vehicles are selected for the road test under the test conditions, and obtain the index limits through data analysis. The results show that the driving control performance scores of the three vehicles are related to the level and energy type of the vehicle,are consistent with the subjective driving experience. It indicates this driving performance testing and evaluation method is feasible and accurate, and can be used for strategy calibration and validation evaluation of the entire vehicle driving performance for engineering samples in the development or validation stage.
Key words: Travel scenarios, Driving control performance, Objective evaluation method, Powerdriving performance, Braking performance, Handing stability
0 引言
整車驾控性能是指汽车动态行驶时驾驶员对车辆可驾驭、可控制的能力[1]。驾控性能包括动力驾驶性、制动性能以及操纵稳定性,这3项性能是整车综合性能的核心部分。
目前对于动力驾驶性、制动性能、操纵稳定性评价主要有2种,其一为汽车企业测评人员在专业开发层面进行的工程化评价;其二为自媒体、第三方汽车行业研究机构进行的评测。这2种评价均基于现有的一系列国家标准进行,而国家标准所规定的测评工况与中国消费者的典型出行场景特征不符,无法准确地体现日常行驶工况下的整车性能及消费者在日常出行时的主观驾驶感受。
余超等[1]建立了一套基于用户真实用车体验的汽车动态驾控性能评价方法。马健君等[2]通过问卷调研方式获取用户对汽车各项性能的得分,运用3种方法设定权重系数,得出整车性能评价结果。黄伟等[3]提出了一种基于模糊神经网络的起步工况驾驶性品质评估方法,确定了响应延迟、加速时间、冲击度、加速度峰值等多维评价指标来进行车辆驾驶性品质的评估。吴延鹏等[4]通过对市场用户制动工况的分析,结合整车道路制动性能试验手段,搭建了整车制动踏板感觉试验评估体系。
有关驾控性能的测评方式虽取得了一定的进展,但这些方法未完全覆盖日常驾驶车辆操控性能的所有关键指标。本文针对中国消费者出行场景,对整车驾控性能进行详尽的测试与评价。首先根据消费者的实际出行场景,结合一系列国家标准设定试验工况及其评价指标和权重。其次在设定工况下进行大量试验,通过分析得出评价指标的限值,最后通过实车测试验证测评方式的有效性。
1 整车驾控性能测评方法
1.1 制定测评方案
针对中国消费者出行场景的整车驾控性能测试评价提出以下方案:
(1)根据消费者日常出行场景,进行小样本调研,并结合工程经验和各项国家标准,设定试验工况、试验工况下的评价指标与指标权重。
(2)对设定的试验工况及其评价指标进行大量试验,得出每个评价指标的分布以及各指标限值。
(3)选取不同能源类型的车型进行试验验证。
1.2 测评方法要求
随着新能源汽车以及线控底盘的兴起,汽车的动力传动方式发生改变,汽车结构布局也变得更加紧凑,这使得新能源汽车整车驾控性能的特点与传统汽车整车驾控性能特点不同。
在设定测试工况与进行试验时应考虑车辆类型,保证测评方法的全面性;在设定评价指标及其权重时,应考虑消费者的关注点,保证测评方法的严谨性;在对测评方法进行验证时,将得出的客观数据与汽车类型、特点进行对比,保证测评方法的准确性。
1.3 驾乘体验测评细则
本次测试项目主要参考《中国汽车消费者研究与评价(CCRT)管理规则(2021年版)》附录D中的驾乘体验测评细则。在CCRT驾乘体验细则中筛选能够进行客观试验的项目做为本文测评项目。
动力驾驶性测评细则中主要关注起步和超越加速过程中动力系统扭矩大小、动力响应是否及时、起步是否吃力、加速线性度及加速连续性;制动性能主要关注制动踏板感觉、制动效能、制动舒适性、制动稳定性以及制动振动噪声;操纵稳定性主要关注转向力、转向响应、回正性能、转向精准性、直线行驶稳定性、弯道行驶稳定性以及瞬态操纵稳定性。
1.4 动力驾驶性工况调研
在CCRT选取测试工况的基础上,进行小样本调研,主要目的是进行动力驾驶性的工况选择。调研对象应满足性别分散、学历分散、年龄阶段分散、行业分散、工作分散,有较高的汽车使用频率。采用问卷调查的形式对满足以上条件的调研对象进行调研。
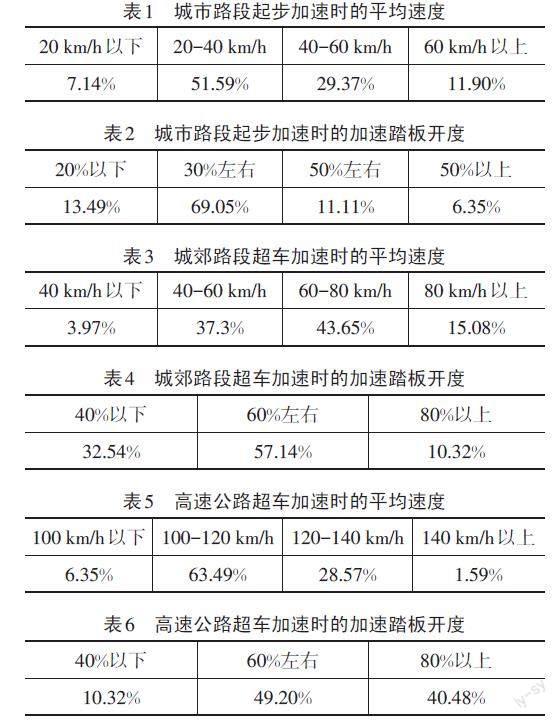
在全国15个省市选取630个有效样本,对调研结果进行分析。关于消费者驾驶习惯的调研结果如表1~表6所示。
由表1~表6可看出大部分消费者在城市路段起步时的平均速度集中在20~40 km/h内,踏板开度约为30%;在城郊路段超车时的平均速度集中在40~80 km/h内,踏板开度约为60%;在高速公路超车时的平均速度集中在100~140 km/h内,踏板开度为60%以上。
2 驾控性能测试工况与评价指标
整车驾控性能测试工况与评价指标包含3个方面:动力驾驶性、制动性能和操纵稳定性。
2.1 动力驾驶性
动力驾驶性指的是直线行驶性能,也就是动力系统的表现,其主要包含2个方面:动力系统的响应性和平顺性。
目前GB/T 12543 《汽车加速性能试验方法》[5]中的测评工况仅包括0~100 km/h以及60~100 km/h全油门加速的极限工况,但在日常用车过程中这2种工况十分少见,其与中国消费者典型出行场景不符。
由CCRT驾乘体验测评细则可以看出,中国消费者在日常行车场景中的动力驾驶性方面更关注加速的快慢(推背感)以及动力输出是否平顺(顿挫感)。消费者更希望汽车动力强劲、响应快以及传动系统换挡平顺。
结合加速工况调研结果(表1)与中国实际出行场景,将动力驾驶性测试工况分为低速(0~30 km/h,30%踏板开度)、中速(40~80 km/h,60%踏板开度)以及高速(100~140 km/h,100%踏板开度)。低速动力驾驶性测试是模拟市区工况起步加速及交通拥堵场景下走走停停状态车辆的动力驾驶性能;中速动力驾驶性测试是模拟市区快速路工况車辆加速超车场景下,车辆的动力性能及动力响应特性;高速动力驾驶性测试是模拟高速工况下车辆后半程加速的动力性能及动力响应特性。选择加速时间、加速踏板时间以及动力系统冲击作为动力驾驶性的评价指标。
其中选取的高速公路油门踏板开度与调研结果有所不同,其原因有2点:根据工程经验,一些车型在踏板开度达到70%以上时已接近全踏板开度动力输出;在对汽车进行动力驾驶性测试时,应考虑到全油门加速的极限性能。所以选择100~140 km/h、100%加速踏板开度进行测试。
2.2 制动性能
目前对于整车制动性能的评价工况大多基于GB 21670—2008《乘用车制动系统技术要求及试验方法》[6],该标准中的试验工况大多为极限制动工况,不能准确体现整车在实际出行工况下的制动性能以及驾驶员的主观感受。
由CCRT驾乘体验测评细则可以看出,对于制动性能,消费者更关心汽车在制动过程的制动距离、制动稳定性和制动过程中的信心感。消费者希望汽车制动效能呈现线性变化,感觉不到明显的车身顿挫、摇晃等情况。
从消费者日常实际用车场景出发,结合国家标准以及工程经验,选取干地制动测试、湿地制动测试、制动稳定性测试、制动踏板线性度测试以及轻微制动测试作为制动性能的测试工况。选定制动距离、制动稳定性、制动响应灵敏度、制动踏板线性度、制动舒适性作为测试的指标。
制动距离分为干地制动距离以及湿地制动距离。干地制动距离是指车辆在高附着系数路面上车速从100 km/h下降到0 km/h的制动距离;湿地制动距离是指车辆在湿滑路面上车速从80 km/h下降到20 km/h的制动距离。
制动稳定性试验是指车辆以80 km/h的初速度在对开路面行驶时制动,车辆是否发生制动跑偏失控情况,评价指标是横摆角速度峰值。
制动踏板线性度包括初期制动踏板力线性度、初期制动踏板行程线性度、末期制动踏板力线性度。初期制动踏板力线性度评价车辆在小减速度范围(0~4 m/s2)内踏板力输入和减速度输出之间的线性关系;初期制动踏板行程线性度评价车辆在小减速度范围(0~4 m/s2)内踏板行程输入和减速度输出之间的线性关系;末期制动踏板力线性度评价车辆在大减速度范围(5~8 m/s2)内踏板力输入和减速度输出之间的线性关系。
制动响应灵敏度包括轻微制动响应时间以及紧急制动响应时间。轻微制动响应时间评价车辆在小减速度范围(0~4 m/s2)制动系统的响应时间;紧急制动响应时间评价车辆在紧急制动下的响应时间。
制动舒适性包括制动俯仰角以及减速度变化率。制动俯仰角评价车辆在制动过程中随重心转移变化的制动过程俯仰特性;减速度变化率评价车辆在制动过程中保持总体制动性能一致性的能力。
2.3 操纵稳定性
操纵稳定性不仅影响汽车驾驶时的操纵方便程度,也决定汽车安全行驶的关键性能,因此对于整车操纵稳定性的要求越来越高。
目前对于操纵稳定性的评价方式有2种,即主观评价与客观评价。主观评价法是根据人的感觉进行评价,但易受到评价人员状态和环境因素影响,难以保证评价结果的一致性和准確性[7]。客观评价法是基于GB/T 6323—2014《汽车操纵稳定性试验方法》[8]进行试验,该标准中评价指标繁多且难以理解,不能直观地反映汽车操纵稳定性品质。本文通过对该标准筛选得出关于操纵稳定性的试验,并对其评价指标进行简化。
由CCRT驾乘体验测评细则可以看出,对于操纵稳定性,消费者更关注驾驶车辆过程中是否感觉到“飘”、“反应迟钝”、“晃”(汽车行驶方向可控力下降,难以稳定)以及转向盘轻便程度的问题。这些问题涵盖了转弯时车身侧倾的大小、极限避障能力、直线行驶性能、回正性能、转向响应特性和机动性等性能。
由于对转向盘转向力轻便程度的评价因人而异,不能通过客观测试结果表示其优劣。根据日常用车场景匹配相关工况,对消费者关注的操纵稳定性能进行测试。选取车身侧倾度测试、避障试验、中心区转向特性测试、低速转向回正性能测试、高速转向回正性能测试、转向盘转角阶跃输入试验、扫频试验、最小转弯直径测试以及转向盘圈数测试作为操纵稳定性的测试工况。选取稳态、瞬态操纵稳定性、中心区转向特征、转向响应特性、转向回正性能、机动性作为测试指标。
稳态操纵稳定性通过稳态回转试验评价车辆侧倾度大小。瞬态操纵稳定性通过测试避障最高通过车速评价车辆极限避障能力。
中心区转向特征通过中心区连续正弦输入试验中的侧向加速度迟滞评价车辆响应相对于转向盘力矩的滞后,转向盘转角迟滞评价车辆转向盘转角相对于转向盘力矩的滞后,来表征直线行驶性能。
转向响应特性通过转向盘转角阶跃输入试验中的侧向加速度响应时间评价车辆的响应速度;通过扫频试验中的谐振频率评价车辆在快速转向输入时的响应特性。
转向回正性能包括横摆角速度超调量和残留转向盘转角。横摆角速度超调量评价车辆在高速转弯行驶回正后是否会发生较大幅度的晃动;残留转向盘转角评价车辆在低速行驶工况下(如停车场)的回正能力。
机动性包括最小转弯直径和转向盘圈数。通过测试车辆的最小转弯直径评价灵活性;通过测试车辆的转向盘圈数评价驾驶便利性。
3 测试与评价过程
3.1 动力驾驶性
3.1.1 低速动力驾驶性测试
车辆以30%油门开度由静止加速至30 km/h。
3.1.2 中速动力驾驶性测试
在车辆以不低于50 km/h匀速行驶状态下,松开加速踏板,带挡滑行至(40±1) km/h时,立即踩下加速踏板将油门开度达到60%±1%并保持(加速踏板起跃时间不大于0.2 s),车辆加速至80 km/h以上。
3.1.3 高速动力驾驶性测试
在车辆以不低于110 km/h的速度匀速行驶状态下,松开加速踏板,带挡滑行至(100±1) km/h时,立即踩下加速踏板将油门开度提升至100%并保持(加速踏板的起跃时间不大于0.2 s),车辆加速至140 km/h以上。
3.1.4 部分数据处理结果
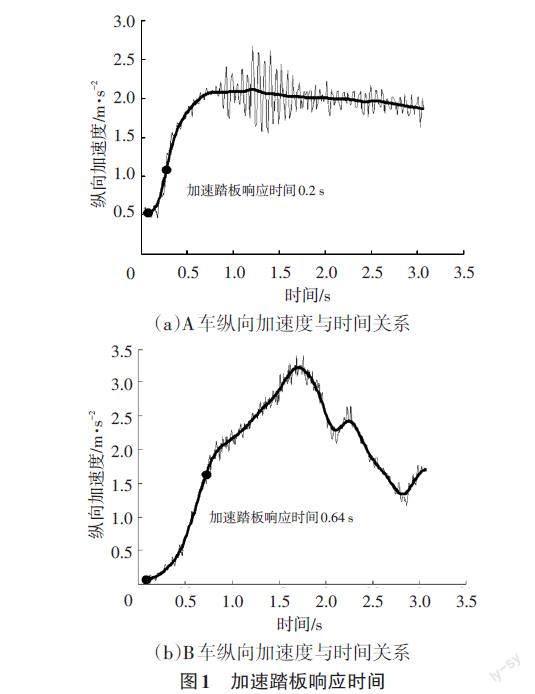
图1为A车、B车起步时加速踏板开度、纵向加速度与时间的关系。对纵向加速度数据进行3 Hz低通滤波处理,图中加速踏板响应时间为加速踏板开度超过10%到纵向加速度达到峰值的50%所需时间。A车、B车加速踏板响应时间分别为0.20 s和0.64 s,分析结果可以得出A车加速踏板响应较快,在起步加速时可以更快地达到峰值加速度。
图2为车辆起步时的冲击变化。对纵向加速度数据进行10 Hz低通滤波处理。
图中最大冲击为踩下踏板至纵向加速度达到峰值过程中纵向加速度最大斜率。得到C车、D车起步冲击分别为5.29 m/s3和19.78 m/s3,分析结果可以得出甲车起步冲击较小,在其起步加速时驾驶员会有更舒适的主观体验。
3.2 制动性能
在进行制动试验时,制动之前手动变速器车型应切换至空挡,自动变速器车型应保持在D挡。
3.2.1 干地制动测试
在满载状态下,试验车加速至105 km/h以上,松开加速踏板,当车速下降至(100±2) km/h时,快速踩下制动踏板到防抱死制动系统(ABS)开始工作或踏板力达到500 N,直至车辆停止。
3.2.2 湿地制动测试
道路条件满足GB/T 21910—2017《轿车轮胎湿路面相对抓着性能试验方法》[9]中5.1和5.2的要求。将试验车在启动路段加速至(85±2) km/h,车辆进入试验路面,松开加速踏板,同时进行紧急制动,ABS系统开始工作,并维持制动直至车辆停止。
3.2.3 制动稳定性测试
车辆左右车轮分别在附着系数不同的2种路面上以80 km/h的初速度全力制动,直至车辆静止(试验过程中允许进行转向盘修正)。其中路面应满足高附着系数路面的附着系数kH≥0.5,低附着系数路面与高附着系数路面的附着系数应满足kH/kL≥2。
3.2.4 制动踏板线性度测试
在轻载状态下,试验车加速至105 km/h以上,松开加速踏板,当车速下降到(100±2) km/h时,匀速慢速踩下制动踏板直到触发ABS工作,过程要求减速度呈线性变化,且尽可能延长踩踏过程。
3.2.5 轻微制动测试
在轻载状态下,试验车加速至65 km/h以上,松开加速踏板,当车速下降到(60±2) km/h时,快速踩下制动踏板并保持踏板行程不变(制动踏板起跃时间不超过0.2 s),直至车辆停止。制动踏板行程选定,应满足在该次试验过程中,车速在50~30 km/h内,平均减速度在1.8~2.2 m/s2内。
3.2.6 部分数据处理结果
图3为制动稳定性测试中横摆角速度变化。对横摆角速度1~2 s内的数据进行滤波处理,横摆角速度峰值为踩下制动踏板后2 s内横摆角速度绝对值的最大值。得出图3中2车辆的横摆角速度峰值分别为2.82 (°)/s和9.67 (°)/s,分析得出E车在对开路面制动时的横摆角速度峰值较小,具有较好的制动稳定性。
图4为制动踏板力与制动减速度的关系。选用踏板行程大于5 mm至减速度到达4 m/s2范围内的制动踏板力和减速度计算制动踏板初期的力线性度。计算公式如式(1)。
[R2=F?A-FAn2F2-F2nA2-A2n] (1)
式中:R2为线性度,F为制动踏板力,A为减速度,n为数据个数。
求得图4中G车和H车的初期制动踏板力线性度分别为0.9 845和0.8 968。分析结果可以得出G车在踩下制动踏板初期的力线性度较好。
图5为制动踏板力与制动减速度的关系。选用减速度在5~8 m/s2范围内的制动踏板力和减速度计算制动踏板末期的力线性度。计算方法与初期力线性度相同,求得图5中I车、J车的末期制动踏板力线性度分别为0.9 998和0.8 767。分析结果可以得出I车在踩下制动踏板末期的力线性度较好。
选用踏板行程大于5 mm至减速度到达4 m/s2范围内的制动踏板行程和减速度计算线性度,如式(2)。
[R2=S?A-SAn2S2-S2nA2-A2n] (2)
式中:S为制动踏板行程。
求得图6中K车、L车的初期制动踏板行程线性度分别为0.9 888和0.8 004。分析结果可以得出K车在踩下制动踏板初期的行程线性度较好,驾驶员“随踩随有”的制动体验感更好。
图7为轻微制动测试中车速由50 km/h减速至30 km/h过程中的制动减速度变化。对制动减速度数据进行拟合处理,轻微制动响应时间为从踩下制动踏板开始至平均减速度达到90%所需要的时间。求得图7中M车、N车的轻微制动响应时间分别为0.09 s和0.64 s,分析结果可以得出M车在轻微踩下制动踏板时的响应较快。
图8为轻微制动测试中车速由50 km/h减速至30 km/h过程中制动减速度与车速的关系。减速度变化率K的计算公式如式(3)。
[K=Ax50-30-Ax10-5Ax50-30] (3)
式中:[Ax50-30]为车速由50 km/h减速至30 km/h过程中的平均减速度,[Ax10-5]为车速由10 km/h减速至5 km/h过程中的平均减速度。
求得图8中O车、P车的减速度变化率分别为5.99%和30.94%,分析结果可以得出O车在轻微踩下制动踏板时的减速度变化率较小,轻微制动时保持总体制动性能一致性的能力较好。
3.3 操纵稳定性
3.3.1 车身侧倾度测试
采用 GB/T 6323—2014《汽车操纵稳定性试验方法》[8]中10.3所述方法。
3.3.2 避障试验
采用 GB/T 40521.2—2021 《乘用车紧急变线试验车道 第2部分:避障》[10]中第2部分所述方法。
3.3.3 中心区转向特性测试
采用 GB/T 6323—2014《汽车操纵稳定性试验方法》[8]中11.3所述方法。
3.3.4 低速转向回正性能测试
试验车辆沿试验路段以(10±1) km/h车速直线行驶,随后转动转向盘至极限位置,待稳定后迅速松开转向盘,过程中保持车速不变。
3.3.5 高速转向回正性能测试
采用 GB/T 6323—2014《汽车操纵稳定性试验方法》[8]中8.3.2所述方法。
3.3.6 转向盘转角阶跃输入试验
采用 GB/T 6323—2014《汽车操纵稳定性试验方法》[8]中6.3所述方法,试验车速为100 km/h,按稳态侧向加速度值为4 m/s2,预选转向盘转角的位置(输入角)。
试验车辆以(100±2) km/h绕圆行驶,达到稳态侧向加速度4 m/s2时的转向盘转角作为预选转向盘转角。车辆以(100±2) km/h的试验车速直线行驶,在横摆角速度为(0±0.5)(°)/s的平衡條件下开始,以预先确定的转向盘转角幅值对转向盘进行频率逐渐增加的连续正弦输入,频率由0.2 Hz逐渐增加至3 Hz,时长不少于20 s。试验过程中保持车速不变。
3.3.8 最小转弯直径测试
采用 GB/T 12540—2009《汽车最小转弯直径、最小转弯通道圆直径和外摆值测量方法》[11]中4.1.1~4.1.3所述方法进行试验。
3.3.9 转向盘圈数测试
转向盘处于中间位置,记下各测量变量的零线。缓慢而均匀地向左转动测力转向盘至转角最大值,再反向转动测力转向盘(向右)至转角最大值,最后(向左)转动测力转向盘至中间位置。记录整个过程中各测量变量的变化。至少进行3次试验。
3.3.10 部分数据处理结果
图9~图14为操纵稳定性部分数据处理结果。图9为稳态回转试验中车身侧倾角与侧向加速度的关系,采用GB/T 6323—2014《汽车操纵稳定性试验方法》[8]中10.4所述方法对试验数据进行处理,车身侧倾度为曲线上侧向加速度为2 m/s2处的平均斜率。求得图9中Q车、R车的车身侧倾度分别为2.95 (°)/g和6.03 (°)/g,分析结果可以得出Q车在稳态回转时侧倾度较小。
图10、图11为侧向加速度与转向盘力矩关系回线组、转向盘转角与转向盘力矩关系回线组。采用GB/T 6323—2014《汽车操纵稳定性试验方法》[8]中11.4所述方法对试验数据进行处理,对迟滞回线组进行多项式拟合得到侧向加速度迟滞与转向盘转角迟滞。求得S车、T车侧向加速度迟滞分别为0.25 m/s2、1.70 m/s2,转向盘转角迟滞分别为0.38°、9.40°。
图12中横摆角速度超调量为横摆角速度响应第一个峰值超过新新稳态值的部分与初始值之比。
图13为转向盘角阶跃输入试验的侧向加速度变化。采用GB/T 6323—2014《汽车操纵稳定性试验方法》[8]中6.4所述方法对试验数据进行处理,侧向加速度响应时间为侧向加速度第一次达到稳态值90%的时间。图13中2车侧向加速度响应时间分别为0.22 s和0.47 s,分析结果可以得出W车转向响应速度较快。
图14为扫频试验中转向盘转角输入和横摆角速度响应的幅频与相频特性。采用GB/T 6323—2014《汽车操纵稳定性试验方法》[8]中7.4所述方法对试验数据进行处理,谐振频率为幅频特性谐振峰所对应的频率。求得图14中2车辆的谐振频率分别为1.77 Hz和0.43 Hz。
4 驾控性能指标限值与得分计算方法
4.1 整车驾控性能指标限值
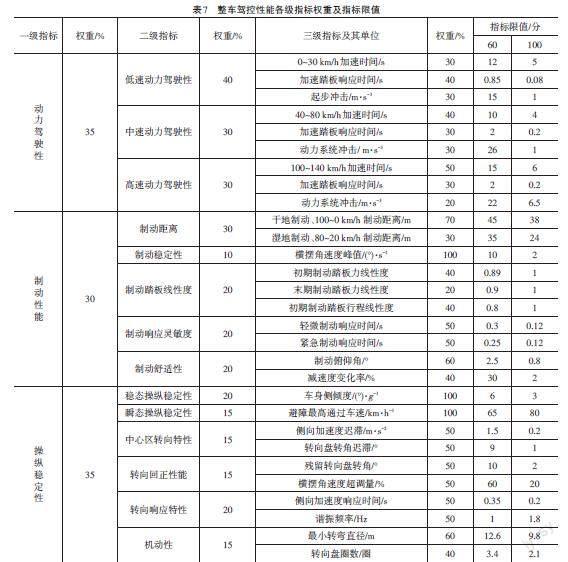
选取不同品牌、级别、能源类型、变速器类型的经典主流车辆做为样本,按上文试验方法对样本进行大量试验,将得到的三级评价指标数据进行分析处理,所有车辆的评分值符合均值为80分、标准差为10分的正态分布(图15),则有95.5%的车辆的得分在60~100分之间,从而得到指标限值,如表7所示。
以车身侧倾度(图16)为例,样本数量为53,由上述方法可计算出得分100的限值K100为3 (°)/g;得分60的限值K60为7 (°)/g。
根据消费者对车辆性能的关注程度,并结合实际场景与工程经验,划定驾控性能各级指标权重见表7。
4.2 整车驾控性能评价得分计算方法
将选定的测试指标分为一级指标、二级指标、三级指标(表1)。驾控性能总体得分根据一级指标得分及权重计算得出,保留小数点后1位,如式(4)所示。
[S=i=13Si×ai] (4)
式中:S为驾控性能的评价总分,i为一级指标序号,Si和ai分别为序号为主的一级指标得分及权重。
一级指标得分根据二级指标得分及权重计算得出,保留小数点后两位,如式(5)所示。
[Si=i=1niSij×bij] (5)
式中:j为一级指标内二级指标的序号,ni为第i个一级指标的二级指标数量,[Sij]、[bij]分别为序号为i的一级指标内序号为j的二级指标的得分和对应二级指标的权重。
二级指标得分根据三级指标得分及权重计算得出,计算方法参考一级指标得分计算方法。
三级指标得分需根据试验测得的指标结果结合表1中60分和100分对应的指标限值,通过线性插值方法计算得出,保留小数点后2位,计算结果大于100分时,按100分计算。
5 测试与评价方法验证
5.1 客观测试结果
选取车型A、车型B、车型C进行测试验证。车型A为某合资品牌两厢紧凑型轿车;车型B为某合资品牌紧凑型SUV;车型C为某合资品牌中型SUV。3辆车的能源类型分别为:汽油、纯电动、油电混合。3车测试结果与各级评分如表8所示。按上述方法计算二级指标评分见表9、一级指标评分以及整车驾控性能总得分见表10。
由表8和图17中可以看出,车型A作为一款小排量燃油车,其动力驾驶性相比于纯电动车、混动车动力驾驶性存在一定的劣势。其中加速踏板响应时间在低、中、高速加速时都比较长,中、高速加速时冲击较大。在制动时初期制动踏板线性度比较差。操纵稳定性方面,由于其车身较小、较轻,在避障试验(瞬态操纵稳定性试验)中表现一般,其他的操纵稳定性试验中表现较好。
车型B作为一款纯电动车,加速性能、加速响应比较好,但加速冲击较大。制动性能、操纵稳定性整体表现较好,由于车身较大、质量较大导致制动稳定性、机动性一般,以及中心區转向特性一般。
车型C作为混合动力汽车,由于低速加速电动机提供动力,高速加速发动机提供动力,所以此款车在动力驾驶性方面优于其他两款车。由于车身大、车身高、整车质量大,在制动性能与操纵稳定性方面劣于其他两款车,其中制动距离较长,稳态操纵稳定性、转向响应以及机动性较差。
5.2 主观评价验证
主观评价验证采用驾乘性能评价规则中的等级打分评价方法,即十分制,0.25分作为最小分度值。由CCRT主观评价专家库中的3位专家对上述3车型进行评价,主观评价的一级指标得分结果如表11所示。
由表11得出各个性能排序,加速性能:车型C>车型B>车型A;制动性能:车型A>车型B>车型C;操控性能:车型A>车型B>车型C。这与上文驾控性能测试得出的一级指标结果排序一致。
由上文可见,根据试验结果计算出的得分与汽车的级别、能源类型等均存在联系,并与主观评价结果一致。所以本文中介绍的整车驾控性能测试评价方法是准确的、可行的。
6 结束语
本文基于中国消费者的出行场景提出了一种客观的、科学的整车驾控性能测试评价方法。此方法实现了主观评价与客观评价的融合,基本覆盖了消费者使用场景中的关键性指标,非常贴切消费者日常驾驶时的感受,并且提出了一种带有权重与标准限值的评分方法,可以更直观地反映日常驾车场景中整车性能的优劣。
汽车企业在新车型开发过程中,可采用本文中提到的测评工况以及评分方法对开发或验证阶段的工程样车进行整车驾控性能的策略标定及验证测评,达到整车开发目标的定位。进而推动产品的技术升级,最终提高消费者的出行品质。
参 考 文 献
[1] 余超, 张绍海, 闫永佳. 汽车驾控性用户体验评价方法研究[J]. 时代汽车, 2021(24): 196-198.
[2] 马健君, 赵礼辉, 李通, 等. 基于用户行驶需求的轻客整车性能评价[J]. 机械强度, 2019(1): 91-97.
[3] 黄伟, 刘海江, 李敏, 等. 车辆起步工况驾驶性品质评价方法研究[J]. 汽车工程, 2018(11): 1324-1329.
[4] 吴延鹏, 徐赟. 制动踏板感觉试验浅析[J]. 汽车实用技术, 2021(22): 125-128.
[5] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 汽车加速性能试验方法:GB/T 12543—2009 [S]. 北京: 中国标准出版社, 2009.
[6] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会.乘用车制动系统技术要求及试验方法:GB 21670—2008[S]. 北京: 中国标准出版社, 2008.
[7] 钟凡. 整车操纵稳定性主客观评价一致性研究[D]. 长沙: 湖南大学, 2019.
[8] 中華人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会.汽车操纵稳定性试验方法:GB/T 6323—2014 [S]. 北京: 中国标准出版社, 2014.
[9] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 轿车轮胎湿路面相对抓着性能试验方法:GB/T 21910—2017[S]. 北京: 中国标准出版社, 2017.
[10] 国家市场监督管理总局, 中国国家标准化管理委员会. 乘用车紧急变线试验车道 第2部分:避障GB/T 40521.2—2021[S]. 北京: 中国标准出版社, 2021.
[11] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会.汽车最小转弯直径、最小转弯通道圆直径和外摆值测量方法: GB/T 12540—2009 [S]. 北京: 中国标准出版社, 2009
(责任编辑 梵铃)