
基于安全性的智能网联汽车测试研究
2024-04-23 19:21李文婷
时代汽车 2024年7期
李文婷

摘 要:文章通过结构化的安全性分析与非道路验证体系,深入分析了智能网联汽车的安全性问题,采用功能安全危害分析与风险评估方法,结合故障树分析和系统理论过程分析,提出了智能网联汽车安全性分析流程,通过实例研究,验证了提出的分析框架和测试平台的有效性。结果表明,该安全性分析与非道路验证体系能够有效识别和评估智能网联汽车中的潜在安全威胁,为智能网联汽车的安全性提供了全面的测试验证支持,对于提升智能网联汽车的安全性设计和验证具有重要意义。
关键词:智能网联汽车 功能安全 安全性分析 非道路验证
1 引言
智能网联汽车的发展标志着电子通信技术、人工智能与传统汽车工业的深度融合,不仅推动了交通工具的智能化和网络化,也为提升道路安全性、效率以及驾驶体验开辟了新的可能。然而,随着这些新技术的引入,新的安全性挑战也随之而来。智能网联汽车的安全性测试和分析成为确保这些先进车辆能够安全融入日常交通的关键环节。因此,针对智能网联汽车进行全面的安全性分析和非道路验证,不仅有助于及早发现和解决潜在安全问题,还对促进智能网联汽车技术的健康发展和公众接受度具有重要意义。
2 智能网联汽车技术及其安全性问题
智能网联汽车通过集成先进的信息通信技术、人工智能技术和数据处理技术,实现了汽车的智能化、网络化和自动化,从而大幅提升了汽车的安全性、效率和舒适度[1]。通过搭载高精度的车载传感器,如雷达、激光雷达(LiDAR)、摄像头等,智能网联汽车能够对周围环境进行360度无死角的感知。利用全球定位系统(GPS)和车载通信设備进行定位和通信,实现信息的实时交换。在感知到周围环境信息后,智能网联汽车需要对这些信息进行处理和分析,进而做出相应的驾驶决策。智能决策控制系统不仅能够处理常规的驾驶任务,如车道保持、自适应巡航控制等,还能应对突发事件,例如紧急避让、交叉口通行等。智能执行过程主要依靠车辆的动力系统、制动系统、转向系统等完成。智能执行系统的高性能依赖于先进的电子控制单元(ECU)和软件算法,确保智能网联汽车在执行驾驶决策时的响应速度和执行精度。
智能网联汽车技术的快速发展,推动了交通系统的现代化,同时也带来了安全性挑战[2,3]。
2.1 网络安全
智能网联汽车依赖内部网络和外部通信系统执行各种功能,从基本的车辆控制到高级的驾驶辅助系统。当遭遇黑客攻击威胁时,外部攻击者能够远程控制车辆的关键功能,如刹车系统、转向系统和动力控制系统,可能远程控制车辆,造成严重的安全事故。例如,通过发送恶意命令,黑客可以迫使车辆在高速行驶中突然减速或者转向,甚至完全失去控制。
2.2 数据安全
智能网联汽车会产生和处理大量的个人和车辆数据,包括驾驶行为、位置信息、车辆状态以及个人偏好等。当这些敏感信息被非法获取和滥用时,会对车主的隐私和安全构成严重威胁。例如,通过分析位置信息和驾驶习惯,不法分子可能追踪车主的行踪,甚至侵犯个人隐私;车辆数据的泄露也可能被用于制定更加精准的网络攻击策略。此外,如果车辆操作数据在没有适当安全措施的情况下被传输或存储,就很容易成为黑客攻击的目标。
2.3 物理安全
智能网联汽车在各种复杂环境中保持安全稳定的行驶时,需要应对突发的交通状况、环境变化以及其他潜在的安全威胁,要求车辆的感知系统、决策算法和执行机构高度可靠,能够在没有人为干预的情况下,实时做出准确的判断和反应。当车辆传感器遭到遮挡、损坏,或通过电磁干扰等手段影响车辆的正常运行,会导致车辆感知能力下降,甚至误判交通情况,从而威胁到行车安全。
3 智能网联汽车安全性分析方法
3.1 安全性分析框架
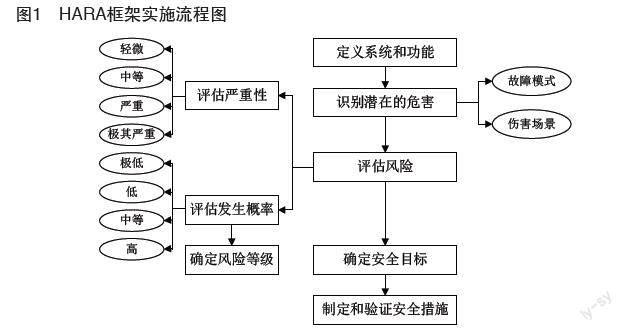
根据ISO 26262功能安全标准,采用危害分析与风险评估(Hazard Analysis and Risk Assessment, HARA)框架,对智能网联汽车进行全面的安全性分析[4]。HARA框架主要通过系统识别智能网联汽车系统中可能存在的安全风险,并对这些风险进行评估和分类。HARA框架图如图1所示。
3.1.1 定义系统和功能
在进行HARA之前,首先需要明确分析的智能网联汽车系统及其功能,对智能网联汽车的各个组成部分及其交互方式进行详细描述,确保分析的全面性和准确性。
3.1.2 识别潜在的危害
基于对智能网联汽车系统功能的理解,识别可能导致伤害或损害的潜在危害,深入分析系统的操作环境、使用情境以及可能的故障模式,以确保不遗漏任何潜在的安全风险。
3.1.3 评估风险
对于每个已识别的危害,评估其造成伤害的严重性和发生的概率,基于这两个维度,每个危害将被分配一个风险等级。
3.1.4 确定安全目标
根据风险评估的结果,确定每个危害相应的安全目标,降低或消除特定危害所需达到的安全要求,通常以降低危害发生概率或减轻其后果的形式出现。
3.1.5 制定和验证安全措施
基于确定的安全目标,设计相应的安全措施来管理和控制风险,制定技术解决方案、过程改进或操作指南等,并通过验证和测试来确保它们能有效达到既定的安全目标。
3.2 安全性分析技术
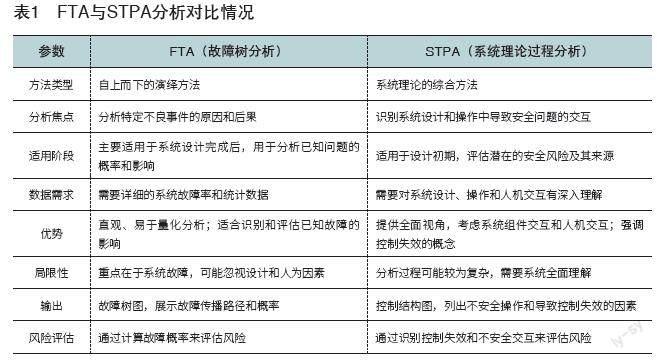
3.2.1 故障树分析(FTA)
通过构建故障树,FTA将复杂的系统故障原因分解为更小、更管理的部分,从而识别系统中的潜在薄弱环节。故障树的顶点代表系统的主要故障事件,而分支则表示导致这一事件的原因。故障树中的逻辑门(如AND门和OR门)用于表示不同故障事件之间的逻辑关系。
3.2.2 系统理论过程分析(STPA)
与FTA聚焦于已知故障模式不同,STPA基于系统理论,注重系统组件间的交互及其对安全性能的影响,安全问题除了是由系统故障引起,也可能是由于系统组件之间的非预期交互或系统与环境之间的交互导致的。因此,STPA试图识别在当前系统设计和操作过程中可能导致危险状态的所有潜在因素。
FTA和STPA在智能网联汽车安全性分析中各有优势。FTA通过构建故障树提供直观的方式识别和分析系统故障的原因和后果,尤其适用于分析已知的故障模式。相比之下,STPA更加关注于系统组件间的交互以及这些交互如何导致非预期的危险状态[5],具体见表1。
4 智能网联汽车安全测试与验证方法
4.1 现有测试方法评估
实车测试是在真实或模拟的道路环境中对智能网联汽车进行测试,以评估其性能和安全性,可以提供最真实的测试结果,但成本高昂,且存在安全风险。模拟器测试通过高度仿真的软件环境来模拟实际道路和交通条件,以测试智能网联汽车的反应和决策能力,这种方法安全性高,成本相对较低,但缺乏一些实车测试中的复杂交互因素。硬件在环(HIL)测试结合了实车测试的真实性和模拟器测试的安全性,通过将真实的车辆硬件组件集成到模拟环境中,以测试硬件与软件的交互,适用于早期发现系统集成问题[6]。
4.2 非道路测试平台的设计与应用
非道路测试平台可以高度自定义极端天气、复杂交通状况等测试场景,为智能网联汽车提供安全可控的测试环境。在封闭测试场地或高度仿真的虚拟环境中,全面评估智能网联汽车的性能和安全性,对于早期发现潜在安全问题、减少实车测试成本和风险具有重要意义。
4.3 测试需求
通过构建逼真的测试环境、模拟车辆运行状态以及设计多样化的测试情景,能够确保测试的有效性。逼真的测试环境能够复现真实交通状况、特定的天气条件以及各种交通参与者的行为,为智能网联汽车提供全面的测试场景。通过模拟不同的车辆运行状态,如加速、减速和转弯等基本操作,以及更为复杂的驾驶场景,例如紧急避让和交通堵塞导航,能够全面评估智能网联汽车的性能。设计多样化的测试情景,揭示智能网联汽车在不同道路类型、交通密度以及面对不同行人行为时的反应,以评估其安全性和可靠性。
5 智能网联汽车安全性测试案例研究
为了进一步进行分析,本文以自适应巡航控制(Adaptive Cruise Control, ACC)系统作为研究对象,进行安全性分析和测试验证。ACC系统主要通过自动调整车速,保持与前车安全的距离,系统级危害包括误加速、误减速、无响应等情形,会导致交通事故,威胁乘员及周围行人的安全,构建故障树如图2所示。
在智能网联汽车的安全测试中,组合不同的测试情景(如CS-1/CS-2)构成综合的测试循环。首先明确每个测试情景(CS-1和CS-2)的参数,具体见表2。
将CS-1和CS-2组合,形成闭环测试循环。目标车辆首先执行减速接近的动作,达到与测试车辆的最近点后,再执行加速远离的动作。考虑车辆的加速度、减速度以及两车之间的动态交互,模拟目标车辆相对于测试车辆的距离随时间的变化关系,如图3所示。在控制环境下执行组合后的测试循环,监测并记录ICV系统对于复杂驾驶情境的反应能力和决策效果。通过分析测试过程中收集的数据,评估ICV系统在面对实际道路条件下的性能和安全性,特别是评估ICV系统如何处理接近和远离两种不同动态条件下的安全距离控制。
通过组合不同的测试情景,为智能网联汽车系统提供全面的测试条件。可以模拟更加复杂和多变的真实驾驶环境,评估智能网联汽车系统在不同驾驶情景下的表现,特别是自适应巡航控制(ACC)系统在变化的距离控制中的稳定性和准确性对智能网联汽车系统进行综合安全验证,确保在复杂交通情境中的可靠性和安全性。
6 结语
综上,本文主要探讨了智能网联汽车面临的安全性挑战,针对这些挑战,提出了结构化的安全性分析与非道路验证流程,旨在提高智能网联汽车的安全性能和可靠性。通过对自适应巡航控制(ACC)系统案例进行具体研究,验证了提出的方法能够有效识别和缓解智能网联汽车的潜在安全风险,为改进设计和提高整体安全性奠定了坚实的基础。
参考文献:
[1]张海春.智能网联汽车网络安全测试研究[D].湖北:华中科技大学,2022.
[2]钱守程,侯丹.智能网联汽车安全测试验证技术分析[J].科教导刊-电子版(下旬),2021(10):273-276.
[3]师浩峰.智能网联汽车开放测试区道路安全风险评估[D].上海:同濟大学,2020.
[4]于艳伯.智能网联汽车信息安全测试及分析[J].汽车测试报告,2021,18(2):3-4.
[5]邹博松,朱科屹,王卉捷.智能网联汽车信息安全测试及分析[J].工业经济论坛,2020(6):56-58.
[6]方哲.智能网联汽车安全测试验证技术[J].智能网联汽车,2019(1):60.
猜你喜欢
商情(2018年25期)2018-07-08
当代经济管理(2018年5期)2018-05-25
科技视界(2017年29期)2018-01-18
汽车科技(2017年3期)2017-06-12
电子技术与软件工程(2017年3期)2017-03-22
中西医结合心血管病电子杂志(2016年23期)2017-03-03
航空兵器(2016年4期)2016-11-28
科技传播(2016年7期)2016-04-28
科技资讯(2015年19期)2015-10-09
电脑知识与技术(2015年11期)2015-06-24
