突发灾害下的输电铁塔应急安全检测机器人的结构设计
2010-05-15 11:30张屹韩俊张虎杨龙陈柳春
三峡大学学报(自然科学版) 2010年3期
张屹 韩俊 张虎 杨龙 陈柳春
(三峡大学机械与材料学院,湖北 宜昌 443002)
据国家电网部门的统计,截止2009年底,我国现有110(66)kV及以上高压输电线路约计553382 km,输电铁塔数量保守估计有180万架,并且还在迅速增多,数量巨大,许多铁塔需要检测维护.目前,输电铁塔和高压线的检修以及高压输电线路除冰机器人和巡线机器人等维护设备的安装都是人工爬塔操作,加上近年来地震、雪灾、洪水、台风等突发灾害越来越多,使更多铁塔遭到破坏,其中很多铁塔存在潜在的危险,不及时检修,就可能造成铁塔倒塌,甚至人员伤亡,给工农业生产和人民生活带来严重影响,输电铁塔的安全检测和维修十分重要.
目前,国内市场尚未见输电铁塔安全检测机器人,铁塔的安全检测有两种方式:一是线路维护人员定期人工爬塔检测[1],其检测速度慢、效率低、带电检测危险大,并且不能完全排除安全隐患;二是安全监控防盗系统实时监控[2],虽然准确性较高,但是其监控系统本身稳定性值得怀疑,且系统难以维护,成本较高,只适合特高压输电线路,难以普及所有电网.因此研发一种安全、高效、准确、经济的输电铁塔安全检测机器人,代替人工定期检测和监控系统实时监控具有较好的应用前景和市场价值.
1 输电铁塔应急安全检测机器人的机构介绍
输电铁塔一般采用角钢设计制作,铁塔主体由4根竖立主角钢以及连接主角钢的其他角钢构成.在安全检测时,只需要对输电铁塔上应力集中的薄弱结构部位进行检测,以达到高效准确[3].本文设计的新型实用输电铁塔安全检测机器人,采用尺蠖行走的仿生学原理攀爬,具备的功能有:(1)行走越障装置在主杆上自主上下行走;(2)行走越障装置抓紧输电铁塔的主杆;(3)行走越障装置感知并翻越障碍物;(4)检测设备沿角钢平稳移动;(5)检测设备检测角钢上的裂纹或断裂等缺陷.
本文设计的输电铁塔应急安全检测机器人由行走越障装置和检测装置两大部分组成,其中行走越障装置由主伸缩机构、夹紧机构、抓手伸缩机构、越障触发传感器4部分组成,检测装置由牵引机构和检测设备两部分组成.检测装置设于两个行走越障装置之间,检测装置的牵引线两端与固定在行走越障装置外壳上的牵引机构连接.利用行走越障装置在输电铁塔主杆上自主上下行走来完成攀爬动作,利用检测装置沿角钢移动检测其是否存在锈蚀、裂纹、断裂等情况,判断输电铁塔的安全性.
机器人的部分设计参数如下:各机构处于完全伸长状态时,行走越障装置体积为800mm×120 mm×300mm(长×宽×高);各机构处于完全收缩状态时,行走越障装置体积为630mm×120mm×245 mm(长×宽×高);机器人总重量约为10 kg;行走越障装置平稳爬行速度约为0.48 m/min,检测设备稳定检测速度约为2.5m/min,机器人的整体图如图1所示.
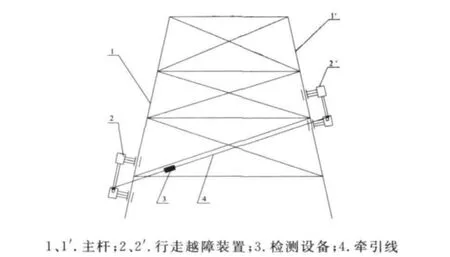
图1 机器人工作示意图
1.1 行走越障装置
行走越障装置由主伸缩机构、夹紧机构、抓手伸缩机构、越障触发传感器4部分组成,如图2~3所示.
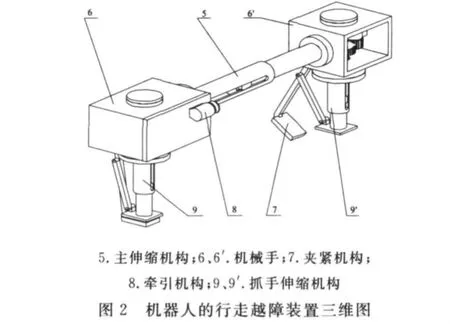
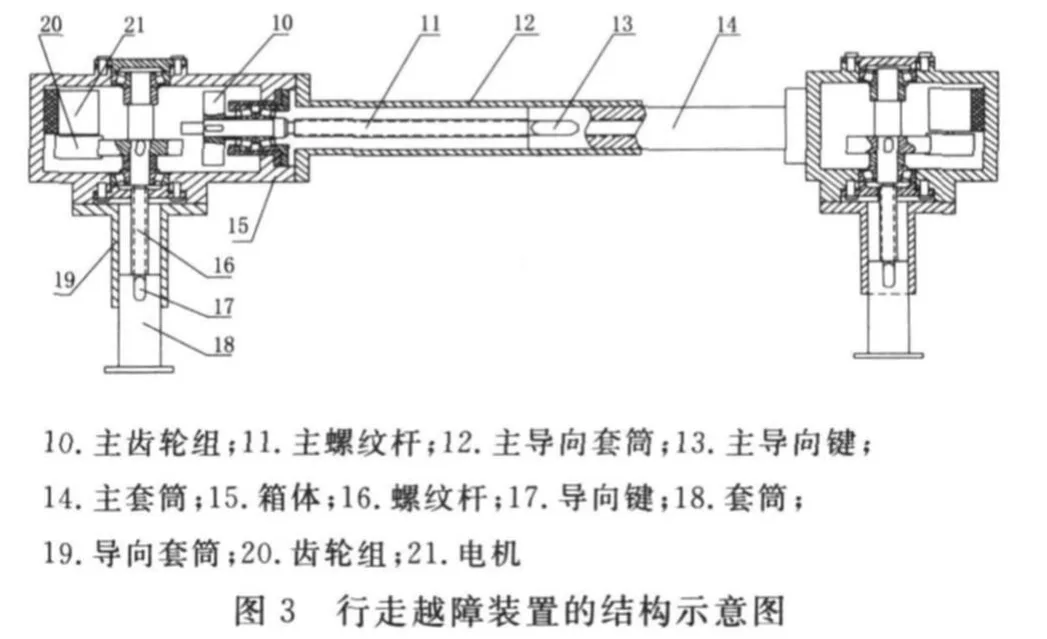
(1)主伸缩机构.主伸缩机构5由电机、齿轮组、主螺纹杆、主导向套筒、主套筒、主导向键构成,电机的输出轴与齿轮组连接,主螺纹杆11一端穿过箱体15与主齿轮组10键连接,主螺纹杆11另一端与带有内螺纹的主套筒14螺纹连接,主螺纹杆11外面套有主导向套筒12,主导向套筒12与主套筒14通过主导向键13连接.电机通过主齿轮组10带动主螺纹杆11转动,通过主螺纹杆11与主套筒14内螺纹之间的相对移动实现伸缩功能,完成行走越障装置的行走动作.
(2)夹紧机构.夹紧机构7由夹板、连接杆、电磁铁构成,夹板22一端与箱体14连接,连接杆23一端与夹板22连接,连接杆23另一端与抓手伸缩机构9的套筒18下端连接,电磁铁24安装在套筒18的下端夹紧板上.这样设计夹紧机构,使该机器人能根据角钢的外形将其牢固夹紧在夹板内,可靠性强.在抓紧的同时,电磁铁24通电紧紧吸附在角钢上,使机器人的夹紧力进一步增大,保证稳定抓紧.
(3)抓手伸缩机构.抓手伸缩机构采用和主伸缩机构同样的原理实现伸缩动作.抓手伸缩机构9由电机、齿轮组、螺纹杆、导向套筒、套筒、导向键构成,电机21的输出轴与齿轮组20连接,螺纹杆16一端穿过箱体14与齿轮组20连接,螺纹杆16另一端与带有内螺纹的套筒18螺纹连接,螺纹杆16外套有导向套筒19,导向套筒19与套筒18通过导向键17连接.利用抓手伸缩机构的伸缩带动夹紧机构松开或夹紧,简化了结构,节约了能源.

(4)越障触发传感器.在主角钢上有类似螺栓、连接板、攀爬杆等障碍物存在.机器人必须能准确检测到抓手伸缩机构贴近角钢进行抓紧的过程中是否碰到障碍物,并确定下一步动作.越障触发传感器安装在夹板22和套筒18的下端夹紧板上,采用红外线距离传感原理.在机械手进行抓紧的过程中,如果感知到障碍物的存在,抓手伸缩机构的电机反向旋转,使夹紧机构恢复松开状态,主伸缩机构的电机反向旋转,机械手向后收缩设定的距离再次进行抓紧,反复动作直到顺利抓紧为止,然后另一机械手开始动作,实现越障功能.
1.2 检测装置
根据输电铁塔的结构特点,本文采用检测设备沿角钢伸长方向移动进行检测.检测装置由牵引机构和检测设备两部分组成.
(1)牵引机构.为了实现检测设备能沿角钢伸长方向平稳移动进行检测,采用绳索牵引的方式牵引检测设备.根据行走越障装置的结构特点,决定在机械手的外壳上固定安装牵引机构8.牵引机构8由电机、卷筒、牵引孔和牵引线组成.通过电机的转动,带动牵引线4上的检测设备3沿角钢伸长方向平稳移动,实现对角钢的安全检测.在检测时,牵引绳的方向并不与卷筒径向垂直,设置牵引孔,是为了保证卷筒始终只承受径向拉力,确保电机旋转顺畅,其他方向的拉力由牵引孔承受.在行走部分上下攀爬时,牵引绳处于松弛状态,方便机器人行走.
(2)检测设备.机器人的行走越障装置定点抓紧后,牵引机构8的电机旋转,使牵引绳沿角钢方向拉直绷紧,检测设备开始对角钢进行安全检测.角钢一般为锈蚀、裂纹、断裂等形式的损坏.检测设备采用模块化设计,可以轻松更换,根据检测的不同要求,可选择超声波检测、射线检测、磁粉检测以及用CCD摄像头记录图像等,拥有较宽的市场面.
2 输电铁塔应急安全检测机器人的运动分析
2.1 Pro/E仿真模拟和慧鱼模型制作
通过Pro/E仿真模拟和慧鱼模型制作试验,证实该机器人能够实现所要求的功能,该机器人结构设计可行,如图6~7所示.

2.2 行走越障装置的行走越障过程
机器人的行走越障动作是由两个同样的行走越障装置2、2′完成的,所以行走越障装置2、2′的行走越障原理一样.本文仅对行走越障装置2的行走越障过程(如图8所示)作详细介绍.
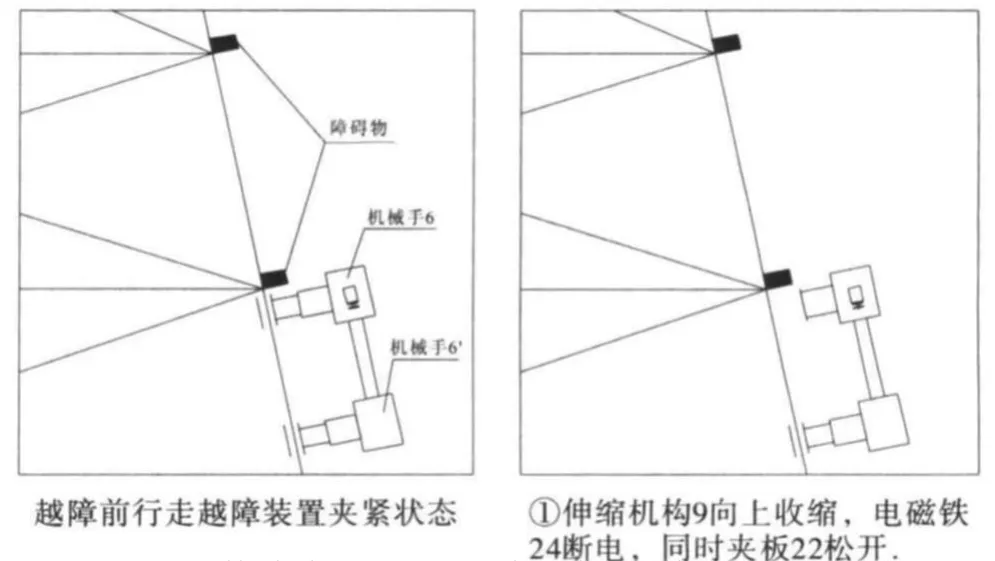
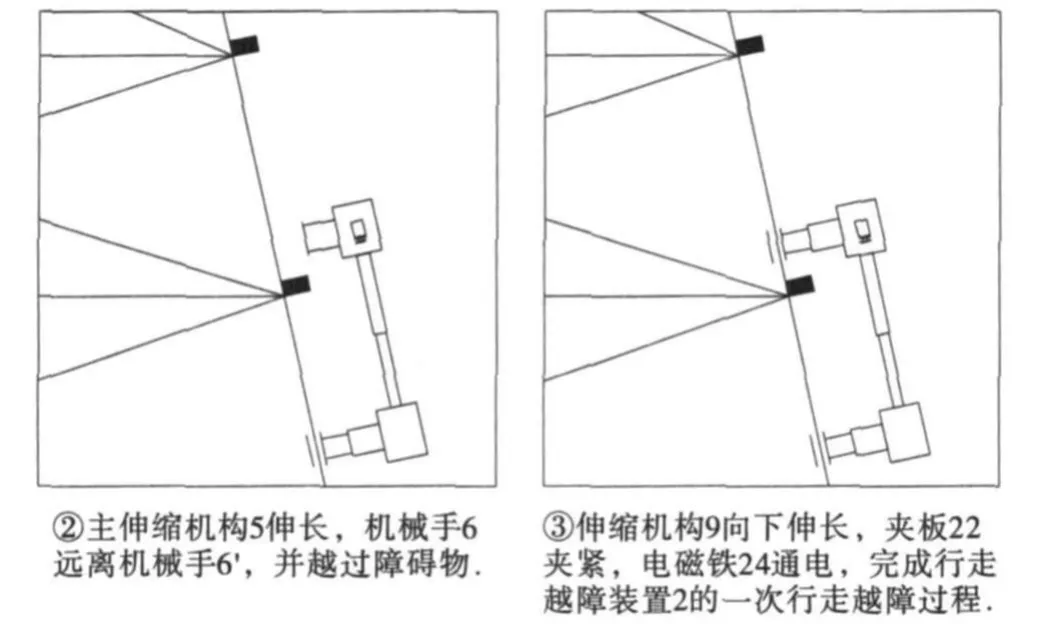
图8 行走越障装置的行走越障过程
第1步:启动机械手6的电机21,通过齿轮组20带动螺纹杆 16转动,电磁铁24断电,使得套筒18向上移动,抓手伸缩机构9向上收缩,同时联动夹紧机构7使夹板22松开.
第2步:抓手伸缩机构9上升至上限位置时停止收缩,启动主伸缩机构5的电机,通过主齿轮组10带动主螺纹杆11转动,使得主伸缩机构5伸长,机械手6远离机械手6′.
第3步:主伸缩机构5伸长到极限位置时停止伸长,抓手伸缩机构9的电机21反向转动,抓手伸缩机构9向下伸出,联动夹紧机构7使夹板22夹紧角钢,同时电磁铁24通电,机械手6抓紧角钢,完成行走越障装置2的一次行走并越障过程.
再次行走时,控制机械手6′的抓手伸缩机构9′收缩,再反向启动主伸缩机构5的电机,通过主齿轮组10带动主螺纹杆11转动,使主伸缩机构5收缩至极限位置并停止收缩,然后伸长抓手伸缩机构9′,使机械手6′再次抓紧角钢.如此循环,实现机器人的行走越障动作.
2.3 检测装置的检测过程
机器人开始工作时,先将两行走越障装置 2、2′分别放置在输电铁塔两主杆1、1′上并将其抓紧.按上述行走越障过程控制两行走越障装置2、2′的行走越障动作,当两行走越障装置2、2′行走至检测设备3能实现检测的特定位置时(如图1所示),行走越障装置2、2′停止行走并抓紧主杆 1、1′,检测装置开始工作,行走越障装置2、2′上的牵引机构8、8′的电机旋转,牵引线4沿角钢伸长方向绷紧,再合理控制两电动机的旋转方向,牵引检测设备3沿角钢的伸长方向移动进行安全检测,并将检测结果反馈给工作人员.检测完成后,牵引机构8、8′的电机旋转,牵引线4放松,两行走越障装置2、2′继续行走到下个检测位置定位,检测设备3再进行检测,如此循环,实现对输电铁塔角钢的检测.
3 机器人的创新点
(1)创新性:目前国内尚未见采用机器人对输电铁塔、广播电视信号发射塔等塔式钢结构进行专业检测的先例;
(2)安全性:采用机器人检测,避免了带电高危环境下的人工爬塔作业,减少了检测工作的危险性,改善了检测人员的工作环境;
(3)高效性:该机器人可以自主快速地行走和跨越障碍物,够到达人工不便到达的地方,能进行近距离、深度检测,可发现输电铁塔一些潜在的问题,对事故的发生可以提前预知及预防;
(4)全面性:检测设备采用模块化设计,可根据检测的不同要求,选择超声波检测、射线检测、磁粉检测以及用CCD摄像头记录图像等,拥有较宽的市场面;
(5)智能性:通过自动控制系统的控制以及检测监控终端的指挥,机器人能自主爬塔、越障,并完成各项检测工作.
4 结 论
目前,国内市场上尚未见类似对输电铁塔进行安全检测的机器人.本文设计的输电铁塔应急安全检测机器人,能很好地解决目前输电铁塔安全检测存在的诸多问题.该机器人的检测工作安全高效,可靠性强,可带电检测,极大降低线路维护人员劳动强度;该机器人还具有结构简单可行、操作维修方便、适于推广等优点,能不受周围环境、天气等因素的限制,随时对输电铁塔进行安全检测.该机器人还可以用于信息通讯塔、广播电视塔以及承受高负载的塔式工程机械等钢结构的安全检测,具有广泛的应用前景和市场价值.
[1]张宏义,曹志全.浅谈750kV输电线路带电杆塔上的作业[J].科技信息,2009,33:1112-1124.
[2]申红岗,崔立忠.GSM电力杆塔防盗、防倒预警装置的研发与应用[J].长治学院学报,2009,26(5):28-30.
[3]张仁奇.加强输电杆塔金属检测工作 提高杆塔可靠性[C].2008年抗冰保电优秀论文集,2008:306-307.
猜你喜欢
中国化肥信息(2022年3期)2023-01-05
结构工程师(2022年2期)2022-07-15
阅读与作文(小学低年级版)(2020年2期)2020-05-25
铁道通信信号(2018年8期)2018-11-10
制造技术与机床(2017年10期)2017-11-28
凿岩机械气动工具(2017年3期)2017-11-22
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10
工程建设与设计(2016年1期)2016-02-27
电测与仪表(2015年21期)2015-04-09
中国科技纵横(2014年21期)2014-12-12