
重型平板运输车微控系统故障诊断技术研究
2010-07-09 11:30罗达钊郑绍春
制造业自动化 2010年8期
罗达钊,郑绍春
(武汉理工大学 交通学院,武汉 430063)
0 引言
重型平板运输车(以下简称平板车)属于重载运输特种车辆,是一种“机-电-液”一体化产品。以PLC为核心的微控系统是平板车的重要组成部分,而故障诊断则是微控系统不可缺少的重要功能。当平板车发生故障的时候, 要求对其进行故障诊断并给予报警。为了提高平板车运行的安全可靠性、调试和维护工作的方便性和系统故障的诊断效率,本文以WTW型平板车故障诊断系统开发为例,综合运用微电技术和基于知识的智能诊断技术对平板车故障诊断系统进行分析和研究,提出了一套准确判断故障、将故障信息分类打包并通过CAN总线传到故障监视终端报警显示或按要求记录的解决方案。
1 平板车及微控系统故障原理分析
整个平板车控制系统由三大部分组成:行驶驱动控制、多模式转向控制和悬挂升降控制。故障类型按其行为进行分类可以分为行走、转向和升降三大类型故障。行走类故障有抱死、打滑、差速。如果在转向过程中每个轮组没有按照预定的角度回转,则在行驶过程中会出现车轮卡滞现象,造成平板车无法行走称为抱死现象;当有一驱动轮在行驶过程中由于地面附着力不够则会出现打滑现象;当车辆转弯时,每个车轮的转速都不一样,外圈的车轮转速一定大于内圈车轮的转速。如果这时内外圈车轮转速一样,则外圈车轮必定发生滑移现象。转向类故障有超差,超差是指驾驶室方向盘转动太快导致轮组转向跟不上而发生自动锁盘的现象。升降类故障有超载、偏载、平台倾斜。
按系统性进行故障分类可分为PLC控制系统内、外部故障。PLC内部故障包括由浪涌电压或噪声瞬时加到基本单元内,引起程序出错、程序执行时间大于PLC规定时间、程序本身缺陷、电池电压跌落、PLC烧坏等。外围设备故障有PLC外部的输入、输出元件如限位开关、电磁阀、接触器等触点的损坏、接线短路,开路、平板车的行为要求对传感元件的使用范围进行设定使检测值超过设定值范围等。
2 平板车及微控系统故障诊断
2.1 平板车行为性故障诊断
基于以上对平板车微控系统故障组成分类和对故障的描述,分析其行为运动原理和特征参数得到故障诊断判断条件如表1。其表中的转速、速度、载重等数据是通过平板车微控系统采集相应的传感器数据信息经运算处理后得到:
2.2 PLC微控系统故障诊断
读取PLC输入或输出位的状态值可以作为开关量故障诊断信号的依据。经分析可知开关量信号有五个状态值:正常、低电压、对电源短路、对地短路、开路;判断当前外部信号状态值与正常信号状态值是否一致,结果一致则表明外部开关量设备处于正常工作状态,不一致则表明对应的输入或输出设备出现故障。
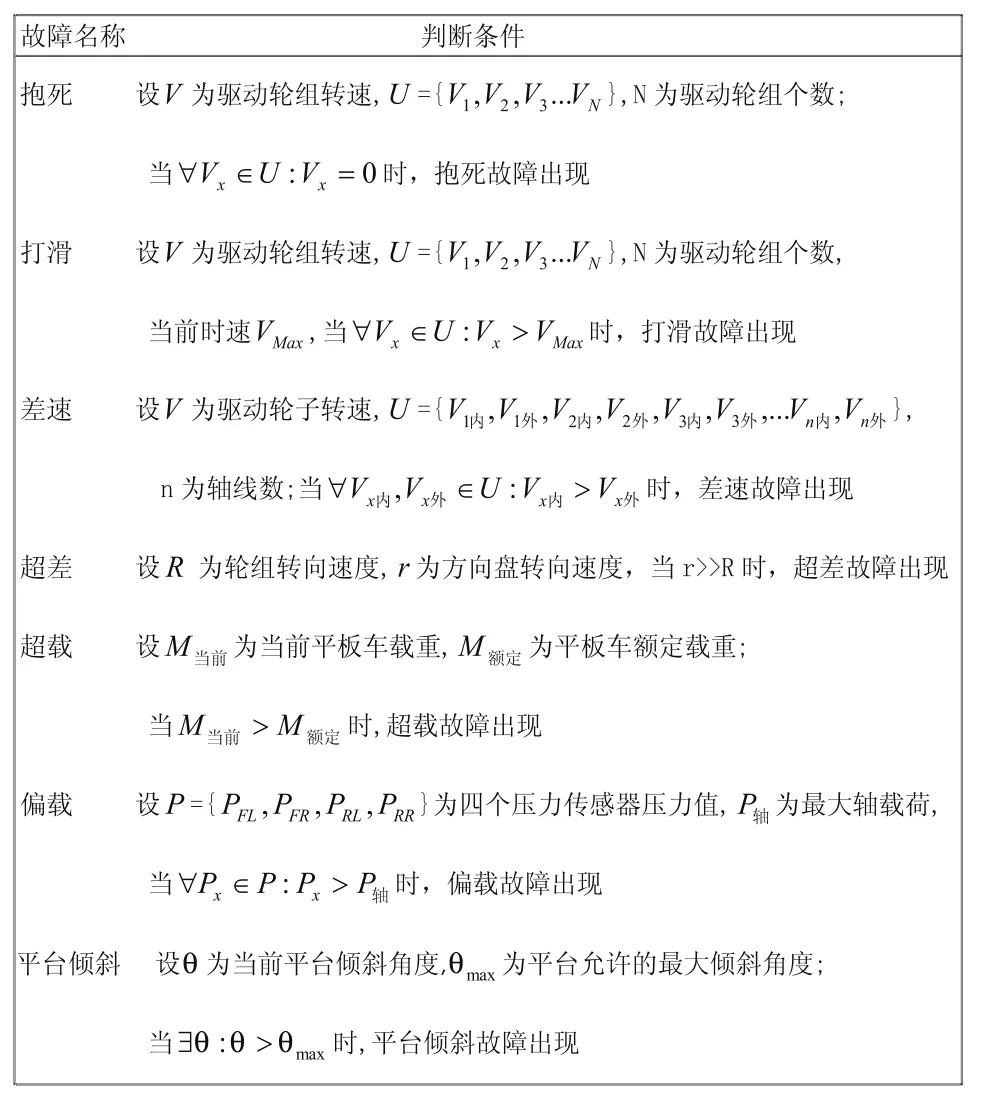
表1 平板车功能性故障诊断条件
对输入模拟量诊断的过程实质就是将在相应A/D通道上读取到的当前模拟量信号值与应用设置的极限值相比较的过程。如果当前实际值远离极限值,则表明传感器所在的元件正常工作;如果当前实际值接近极限值,则为故障发生状态。应用设置的极限值根据实际参数变化范围确定。模拟量输出和PWM输出的诊断原理与开关量输出诊断原理基本相同,不再作详细论述。
3 基于知识的智能故障诊断方法
基于知识的故障诊断系统是以领域专家和操作者的启发性经验知识为核心, 通过演绎推理或产生式推理来获取诊断结果, 其目的是寻找一个故障集合使之能对一个给定的征兆(包括存在的和缺席的) 集合产生的原因做出最佳解释。系统的智能来源于它所拥有的知识, 知识是其工作的原始驱动力。本文所提到平板车微控系统的知识的获取来自于诊断对象的背景知识(如诊断对象的结构、功能、安装和维修情况等)、专家经验(诊断知识获取的重要来源,通过与专家的交流来获取) ,这些知识如概念、实例、规则等比较容易用显式语言描述的,通过人机交互的方式由领域专家或系统用户将其输入到诊断系统知识库中。对于专家经验类知识, 可采用模糊产生式规则描述如下:
IF A1 AND A2 AND … AND An THEN B (CF)
其中: Ai 为前提,B 为结论,CF 为专家给出的规则的置信度, 且0≤CF≤1。
以平板车装载重物时超载偏载情况为例:通过四点最大轴载荷和读取压力传感器数值进行计算可以得到当前载重、当前载重下的安全菱形区域和重物的重心位置,如果载重量大于额定载重,则装载过程中100%出现超载;如果载重量小于额定载重且重心位置在安全区域以外,则90%出现偏载现象。其知识表达可以如下规则表示:
IF 载重量小于额定载重 AND 重心位置在安全区域以外 THEN 偏载故障出现 (0.9)
基于知识的诊断推理具有知识表达直观、形式统一、模块性强、推理速度快等优点。但是这种方法具有较大的局限性, 如知识集不完等。在本系统应用中,由于知识集可以完全由对象的背景知识和专家经验获得,故障诊断知识形式统一直观等原因,基于知识的故障诊断系统完全符合实际应用要求。
4 故障诊断系统硬软件实现
4.1 平板车微控系统的硬软件结构
平板运输车微控系统的硬件结构如图1所示

图1 平板运输车微控系统的硬件结构
上位机即为微控系统监视器采用上海派芬公司提供的ST系列LCD彩色显示器。控制器采用力士乐的RC6-9可编程控制器。扩展模块采用力士乐RCE12-4扩展模块。上位机程序的软件开发平台是支持IEC61131标准的CoDeSys。控制器程序则是用力士乐公司自配的CoDeSys核心的软件开发平台Bodas,具有和CoDeSys类似的编写环境。控制器采集平板车行走类、转向类、升降类的传感器信息和元件故障信息,经过综合处理后通过CAN1总线发送到上位机进行显示和故障诊断报警;
故障诊断系统软件程序流程图如图2所示。

图2 软件程序流程图
4.2 故障诊断信息传输的数据结构
故障系统各个部件的通讯是通过CAN总线进行的,所以故障信息必须组合打包成CAN信息帧。表2是对CAN信息帧数据打包的格式定义与:
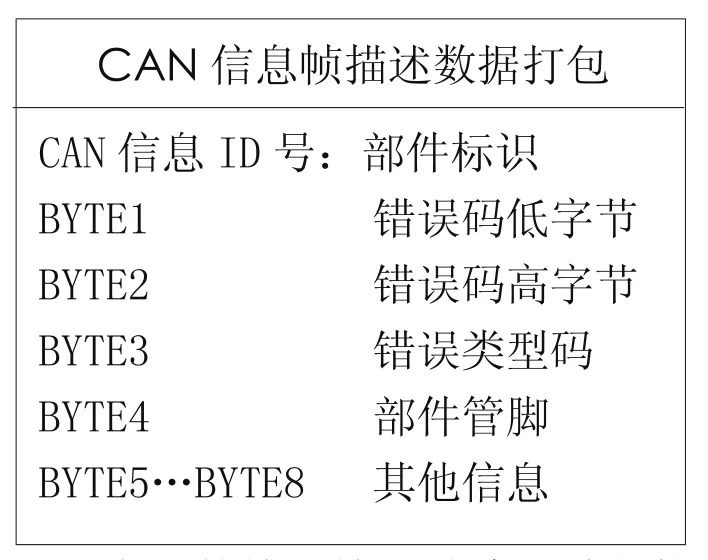
表2 故障信息打包数据结构定义
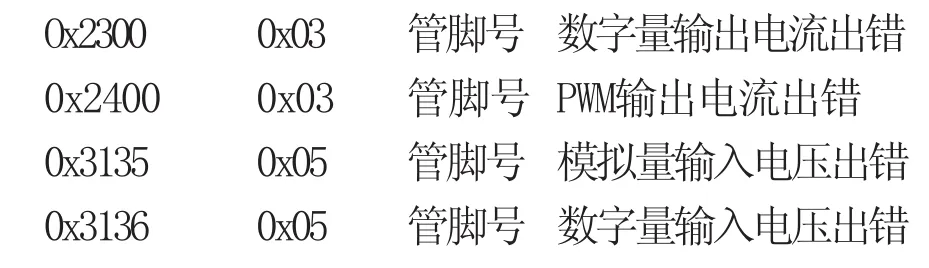
举出最常见的输入输出故障和功能性故障,并通过CAN信息帧数据定义的格式打包发送到CAN总线上:

4.3 故障诊断信息显示的数据结构
故障诊断的信息帧从控制器A和控制器B上通过CAN总线发送到上位机进行显示。显示界面是用标准的CoDeSys列表控件,该控件需要用户自定义一个数据结构绑定列表控件,对数据结构填充内容就可以显示出来。经分析,显示界面数据结构定义如表3所示。

表3 显示界面数据结构定义
在CoDeSys下的数据结构定义代码如下:

4.4 故障诊断信息显示
通过代码编写,界面显示数据结构与界面列表关联起来,界面实时显示数据结构的信息内容,故障诊断信息显示界面如图3所示。
5 结论

图3 故障诊断信息显示界面
基于知识的重型平板运输车故障诊断系统对于保障整车微控系统的可靠性, 安全性具有重要的意义;对调试、使用和维护也带来相当大的便利;该故障诊断微控系统经过开发调试,已顺利完成了工业试运行测试,并对各种故障进行了人工模拟,各项性能指标达到了设计要求,目前已经通过了厂方的验收。系统能准确完成各种复杂操作控制,对平板车电液系统的状态监测和故障诊断迅速准确。但还有许多问题值得探讨和研究,基于知识的智能专家诊断系统依然存在许多明显的局限性,由领域专家提供知识到机器学习或基于神经网络等对平板车故障诊断系统未来有很大的发展空间。
[1] 成曙,等.基于知识的汽车电气设备智能故障诊断系统[J].计算机应用研究,2004,2,169-170,185.
[2] 陆胜,刘锬.基于知识的智能故障诊断方法和过程实现[J].机床与液压,2009,37(1),167-170.
[3] 朱浩波.PLC在机电设备故障诊断中的应用[J].哈尔滨理工大学学报,2001,6(4),88-91.
[4] 张高升.重型工程平板车监控系统的研制[D].武汉:武汉理工大学,2007.
猜你喜欢
家庭影院技术(2021年3期)2021-05-21
课程教育研究(2021年23期)2021-04-13
铁道通信信号(2020年5期)2020-09-21
上海交通大学学报(2020年7期)2020-08-03
计算机教育(2019年1期)2019-12-20
物联网技术(2018年4期)2018-05-15
铁道通信信号(2016年10期)2016-06-01
中国市场(2016年45期)2016-05-17
中国教育技术装备(2015年21期)2015-03-11
铁路通信信号工程技术(2014年5期)2014-02-28
