
基于卡尔曼滤波的罗兰C时差信号处理
2010-08-29 01:38黄欣欣杨东凯
全球定位系统 2010年5期
黄欣欣,杨东凯
(北京航空航天大学电子信息工程学院,北京100191)
0 引 言
罗兰C(Loran-C)是陆基中远程精密无线电导航系统。系统的地面发射台通常由一个主台和两个以上的副台组成,接收机通过测量主副台脉冲到达时间差 TD(Time Difference),利用双曲线原理进行定位。罗兰C信号主要依靠地波传播,信号功率大、抗电子干扰和抗天体磁暴能力强,这些优点是卫星信号所不具备的。增强型罗兰C系统是一个完全独立的、GNSS的最重要的互补备份系统,是罗兰C系统的发展方向[1]。
在罗兰C系统中,受到杂波和环境噪声的影响会造成较大的时差测量误差,甚至会出现因周期识别模糊而造成时差出现几倍10 μ s的误差,大大降低罗兰C接收机的定位精度。解决这个问题的一种办法是在前端信号处理时,将噪声和干扰处理干净,从而避免周期识别模糊。但是仅靠前端的信号处理有时不能完全解决问题,这时就应该采取后端数据处理的方法加以消除。
卡尔曼滤波[2]是一种递推线性无偏最小均方误差估计算法,它能够平滑数值的离散性。采用卡尔曼滤波对罗兰C接收机输出的时差数据进行处理,减小时差测量误差,从而提高定位精度。
1 卡尔曼滤波
使用卡尔曼滤波时,首先要对应用对象进行建模,得到状态方程与观测方程,并且要求状态方程与观测方程均为线性,系统噪声与观测噪声均为白噪声。简要介绍建立在罗兰C时差处理问题的卡尔曼滤波算法中用到的消息模型与观测模型。
1.1 消息模型[3]
消息模型用于描述目标的运动。这种模型将某一时刻的状态变量表示为前一时刻状态变量的函数,以供滤波算法使用。主要介绍CV(Constant Velocity)模型与CA(Constant Acceleration)模型。
1)CV模型
CV模型假定目标做匀速直线运动,而将加速度看作是零均值白噪声形式的扰动。其离散形式的状态方程为

白噪声uk为系统噪声矢量,其协方差阵为Qk。Φk为状态转移矩阵,具体形式如式(2)所示,其中T为采样间隔。

2)CA模型
CA模型假定目标做匀加速直线运动,而将加速度看作是零均值白噪声形式的扰动。其离散形式的状态方程为

白噪声uk为系统噪声矢量,其协方差阵为Qk。Φk为状态转移矩阵,具体形式如式(4)所示,其中T为采样间隔。
1.2 观测模型
其中,zk为观测变量,即实际测量的时差值;wk为观测噪声,其协方差阵为Rk;Hk为观测矩阵,CV、CA模型的Hk取值分别为
1.3 卡尔曼滤波公式
用卡尔曼滤波的方法处理状态方程(1)或(3)、观测方程(5),就得到如下的卡尔曼滤波公式[4]
预测

预测误差相关阵

增益阵

滤波

滤波误差相关阵

2 具体实验过程及结果分析
所采用的罗兰C数字接收机型号为DE8100,该接收机平均每隔5 s更新一次数据,RS232串口输出数据保存为逗号分隔值文件,包括定位点经纬度、同一个台链中两个台对的时差(TD1和TD2)等数据。根据研究需要,只选取时差数据进行处理。首先对卡尔曼滤波器进行参数设置:
根据接收机的测量精度,设观测噪声协方差Rk=1;
系统噪声协方差Qk=10-4;
滤波误差相关阵初值P0=104I。
2.1 静态测量数据处理
静态测量[5],即待测点相对于其周围固定点没有位置变化,或在一个观测周期内,位置变化无法察觉。第一次测量是在罗兰C7430台链信号覆盖的区域内选择某一待测点(山东省烟台市某地),进行了观测时长约40 min的数据采集。分析该状态下采集得到的时差数据的特征,其相应的时差一次变化率很小(最大值为0.01 μ s/s),可以将时差近似看成是无机动变化的,因此使用CV模型对其进行处理。选取状态初值x0=[z10]T。分别对TD1、TD2进行卡尔曼滤波,滤波前后的时差值如图1所示,时差单位为 μ s。
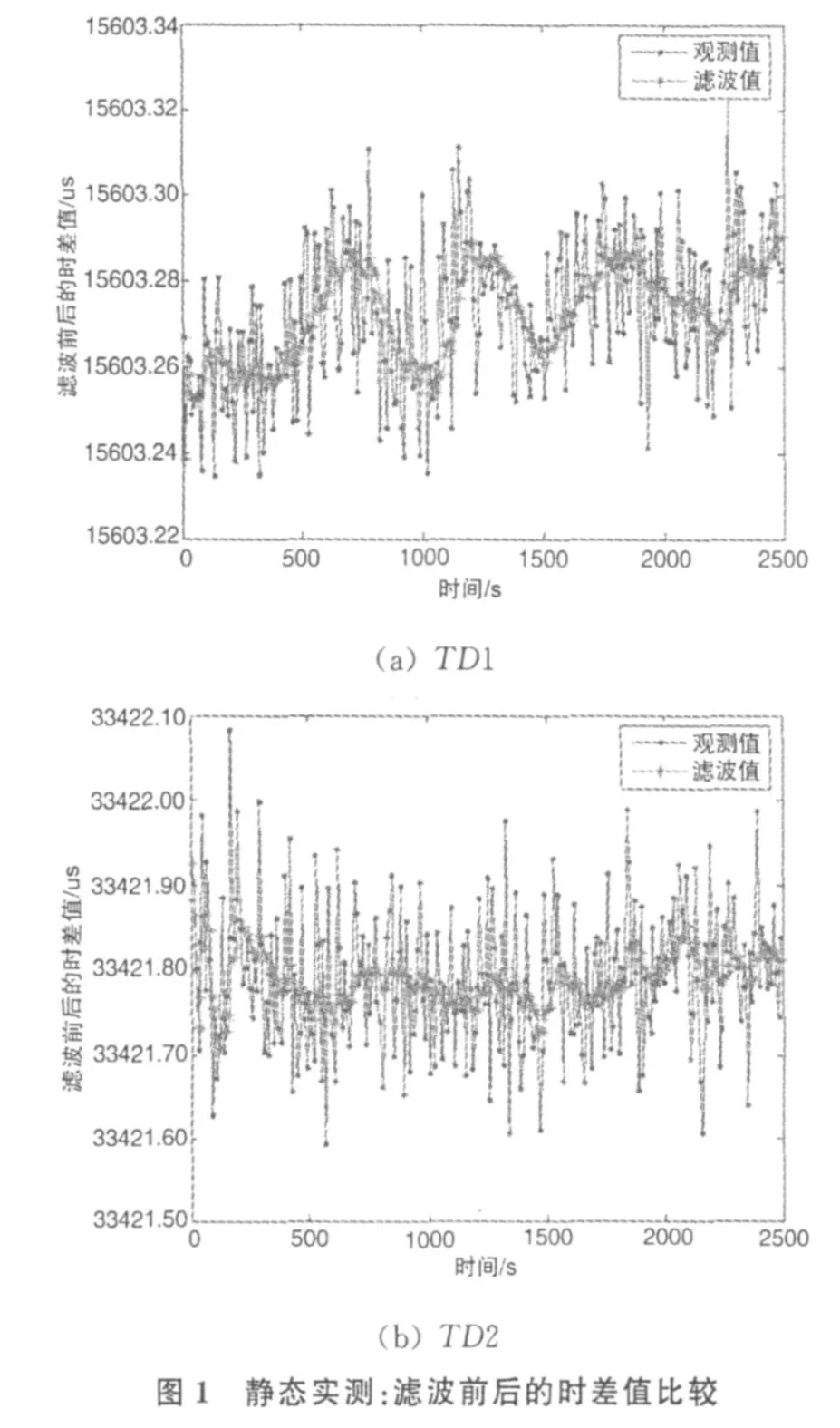
对滤波前后的时差值进行统计计算,求得的均方差如表1所示。可以看到经过卡尔曼滤波后,时差TD1和TD2的均方差都明显地减小,这是由于所建立的卡尔曼滤波模型准确,取得了良好的跟踪性能和滤波精度。

表1 滤波前后的时差均方差比较
2.2 动态跑车数据处理
第二次测量是在动态跑车的状态下进行数据采集。平均运动速度为38 km/h。分析该状态下采集得到的时差数据的特征,其相应的时差一次变化率(最大值为0.1 μ s/s)和二次变化率(最大值为0.02 μ s/s2)也呈现一定的值,但是,这些值相对有较大加速度的运动体来说也是比较小的,所以就时差本身的机动性而言,它属于弱机动变化,因此选用CA模型对其进行处理,选取的状态初值为x0=[z1 0 0]T。滤波前后的时差值如图2所示。
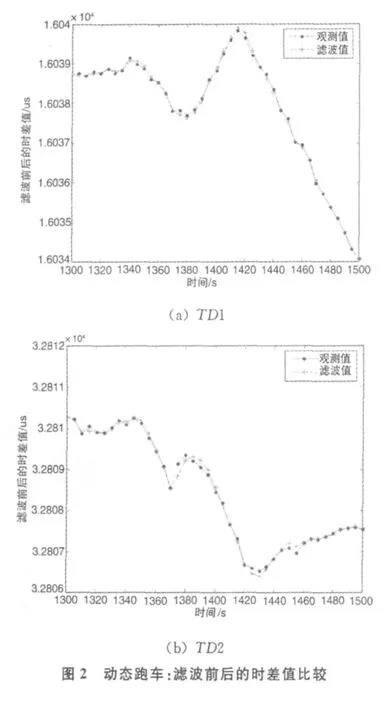
从图2可以看出,所采用的CA模型滤波算法能够有效地去除动态跑车情况下的测量时差奇异值,如图2(b)中第1380 s时刻,达到平滑数据的目的,同时也能较好地跟踪上时差的变化。
3 结 论
针对静态定位和动态跑车两种情况下的罗兰C实测时差信号的特征,设计卡尔曼滤波算法,对实际测量数据进行处理。结果表明,所采用的卡尔曼滤波算法能够有效地减少时差的测量误差。下一步工作将研究卡尔曼滤波器参数的大小对滤波性能的影响,对已有算法进行改进。
[1]Gregory W J,Peter F S,Richard J H,et al.An E-valuation of eLoran as a Backup to GPS[C]//Technologies for Homeland Security,2007 IEEE Conference,Woburn,M A,2007:95-100.
[2]李建勋,柯熙政,胡 钢.长河增强系统发播信号的定时误差及其Kalman修正[J].测试技术学报,2008,22(2):145-149.
[3]周宏仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社,1991.
[4]朱云龙,杨东凯,柳重堪.一种用于高动态GPS频率估计的滤波算法[J].北京航空航天大学学报,2009,35(1):23-27.
[5]杜晓辉,任 章.基于卡尔曼滤波的GPS静态定位精度分析[J].全球定位系统,2008,34(5):47-51.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年7期)2021-08-13
文苑(2020年10期)2020-11-07
计算机应用与软件(2019年2期)2019-04-01
电子制作(2019年23期)2019-02-23
经济研究导刊(2018年19期)2018-07-24
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年9期)2017-12-18
特别文摘(2017年13期)2017-11-11
考试周刊(2016年54期)2016-07-18
