一种统一的无刷直流电机直接反电动势法
2010-11-04 01:15薛晓明杨
电工技术学报 2010年9期
薛晓明杨
(1. 常州信息技术学院计算机学院 常州 213164 2. 江苏科技大学电气工程学院 镇江 212003)
一种统一的无刷直流电机直接反电动势法
薛晓明1杨2
(1. 常州信息技术学院计算机学院 常州 213164 2. 江苏科技大学电气工程学院 镇江 212003)
无刷直流电机直接反电势法研究已经得到了比较广泛的开展,但只适用于上管调制、下管恒通的控制方式。在研究无刷直流电机传统模型的基础上,根据无刷直流电机的工作原理,构建了无刷直流电机的简化模型,由此简化模型分析了不同 PWM技术断开相端电压的特点,提出了通过在PWM开通期间采样断开相端电压与二分之一的母线电压相比较检测反电动势过零点的方法,并进行了样机实验。实验结果表明:提出的方法能在很宽的电机速度范围内,精确地获得不受PWM影响的反电动势过零点。
直接反电动势法 无刷直流电机 PWM 无位置传感器 转子位置检测
1 引言
无刷直流电机(BLDCM)以它优越的性能,被广泛地应用于办公自动化、电动汽车、电动自行车、家用电器等各个领域。在无刷直流电机的控制中,转子位置的检测是至关重要的。传统的无刷直流电机采用一套位置传感器来获得转子位置信息,从而控制逆变器换相使电流与反电动势相位一致,但使用位置传感器存在工艺安装、周围环境等多种因素的不利影响,因此无刷直流电机的无位置传感器控制成了研究的热点[1]。无刷直流电机在正常导通时期只有两相绕组通电,另外一相绕组断开,断开相绕组的端电压反映了该相绕组的反电动势信息,利用无刷直流电机的这个特点,一些间接和直接检测断开相绕组反电动势的方法被提了出来[2-10]。文献[2-4]提出的通过测量断开相绕组端电压和虚拟电机中性点电压之间的关系来间接获得反电动势过零点的方法应用最广泛,但这种方法需要重构电机虚拟中性点,而且滤波电路的使用会导致检测信号与实际反电动势过零点信号产生相移。文献[5]通过检测定子绕组三次谐波电压来间接获得反电动势过零点,不受PWM调制方式的影响,但也需要重构电机虚拟中性点。文献[6]提出的通过检测逆变器续流二极管的导通现象来间接获得反电动势过零点的方法,该方法无需虚拟中性点,但其检测电路需要六路独立的电源供电,增加了系统的成本。文献[7-9]提出了直接检测反电动势过零点方法,这种方法通过PWM关断期间直接采样断开相的端电压过零点来获得该相反电动势过零点信号,无需重构电机中性点和使用滤波电路,克服了间接反电动势法所有缺点,已制成专用芯片[10],但它只适用于上管PWM、下管恒通的调制方式。文献[11-12]提出了一种改进的低成本直接反电动势法,但只能适用于全桥PWM调制方式,而且全桥PWM调制方式逆变器的功率损耗是半桥PWM调制方式的两倍,因此这种方法并没有实用价值。为了解决上述问题,本文提出通过在PWM开通期间采样断开相端电压与二分之一的母线电压相比较检测反电动势过零点的方法,理论分析和实验结果证明,提出的方法能适用于各种 PWM控制策略对转子位置的检测,而且硬件实现简单,成本低廉,具有很强的通用性。
2 无刷直流电机的简化模型
两相导通三相六状态的无刷直流电机由电机本体、位置检测器、控制器和逆变器组成,传统的等效电路如图1a所示。图1a中AH、BH、CH为逆变器的上臂开关,AL、BL、CL为逆变器的下臂开关;R和L为电机的等效电阻和等效电感;ea、eb、ec为电机三相绕组的反电动势。控制器包括换相信号形成和 PWM 信号产生电路,用于把位置检测信号转换成逆变器的六个开关驱动信号。
根据无刷直流电机的工作原理,在一个 360°电角度周期内,不论与电机连接的六个开关应用何种PWM驱动信号,只有两相绕组中有电流流通。由此,可得无刷直流电机简化的等效主电路,如图1b所示。图1b中P相、N相为A、B、C三相中任意导通的两相,而O相为A、B、C三相中不导通的那一相;PH代表上桥臂AH、BH、CH三个开关的任一开关,驱动对应关系为:NL代表下桥臂AL、BL、CL三个开关的任一开关,驱动对应关系为:为导通两相绕组的反电动势,eO为未导通相绕组的反电动势,且eP=−eN;VP、VN为导通的两相绕组的端电压,VO为未导通相绕组的端电压;Vn为三相绕组星型联结中点对地的电压;iP、iN为导通两相绕组的相电流,iO为未导通相绕组的相电流,且iP=−iN,iO=0。

图1 无刷直流电机等效电路Fig.1 Equivalent circuit for brushless DC motor
3 不同PWM调制技术的断开相端电压分析
针对不同的应用,无刷直流电机常用的调制方法有H-PWM-L-ON、PWM-ON、ON-PWM、PWMON-PWM四种[5]。不同PWM调制方式PH、NL开关驱动信号与断开相反电动势eO的对应关系如图2所示。从图2可知,在每个60°电角度状态期间,未导通相反电动势要么从+E变化到−E,要么从−E变化到+E。根据图1b所示的无刷直流电机简化模型,无刷直流电机的端电压方程可表示为

将eP=−eN,iP=−iN,iO=0代入式(1)~式(3)并整理,得到断开相端电压为

从式(4)中可知,断开相端电压取决于两个导通相的端电压和断开相的反电动势,下面以ON-PWM调制方式为例进行分析。
(1)断开相反电动势从+E渐变为−E阶段。如图2中的0°~60°,120°~180°,240°~300°所示,此时对应的驱动信号GPH恒为高电平,GNL为PWM。

图2 不同PWM调制方式PH、NL开关驱动信号与断开相反电动势Fig.2 Driving signals for PH and NL switch and open-phase EMF in different PWM modulation modes
当GNL为高电平时,等效电路如图3a所示,断开相端电压为

当GNL为低电平时,等效电路如图3b所示,断开相端电压为

(2)断开相反电动势从−E逐渐变为+E阶段。如图 2中的 60°~120°,180°~240°,300°~360°所示,此时对应的驱动信号为GNL恒为高电平,GPH为PWM。
当GPH为高电平时,等效电路如图3a所示,断开相端电压与式(5)相同。
当GPH为低电平时,等效电路如图3c所示,断开相端电压为

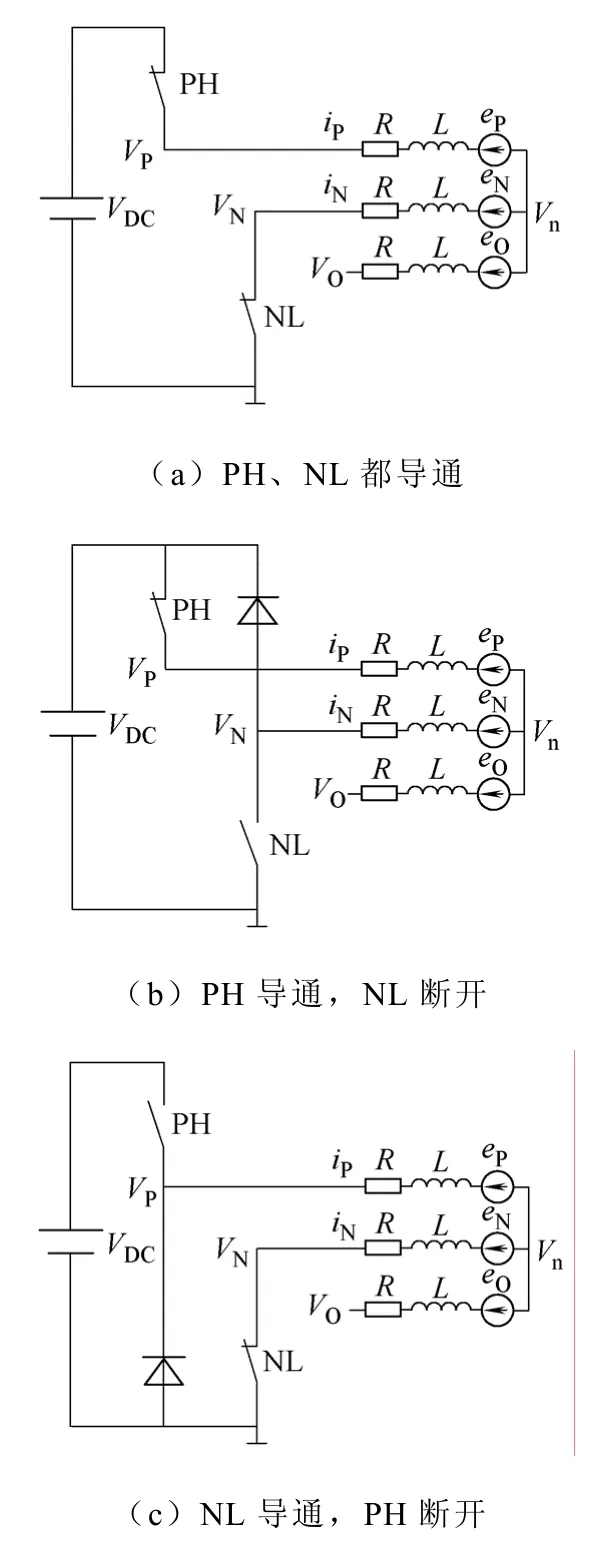
图3 等效电路图Fig.3 Equivalent circuit diagram
同理,可以推导出其他三种PWM调制策略的断开相端电压,见下表。
从下表可以看出,无论哪种PWM调制策略,也不管断开相反电动势的变化方式,在上下开关都导通期间,断开相的端电压始终等于VDC/2+eO,如表中阴影部分所示。因此,如果在PWM开通期间采样断开相端电压与 VDC/2相比较得到的过零点,就是该相的反电动势过零点信号。但如果在 PWM关断期间采样端电压,不同的PWM调制策略和不同的断开相反电动势变化方式,获得断开相端电压过零点的比较电压是不相同的,必须在0、VDC/2和VDC之间变化。两者相比较,显然应用PWM开通期间检测反电动势过零点不受 PWM 调制方式的影响,据此构成的反电动势过零点检测电路如图4所示。图4中VD1、VD2、R1、R2用于对端电压进行分压和限幅,使其不会超出CD4051要求的电压。CD4051为多路选择器,对三相端电压的输出信号进行选择,即每60°电角度只将断开相的端电压送入到后级比较器中,CD4051的控制信号CS1、CS2、CS3由可编程序控制器的I/O提供。R3、R4、VDZ、LF353构成滞环比较器,用来消除反电动势过零点附近的不正常跳变,滞环电压为0.3V。74LS74为D触发器,CP端由开关的PWM来控制,实现将PWM开通期间检测到的反电动势过零点信号进行锁存的目的。
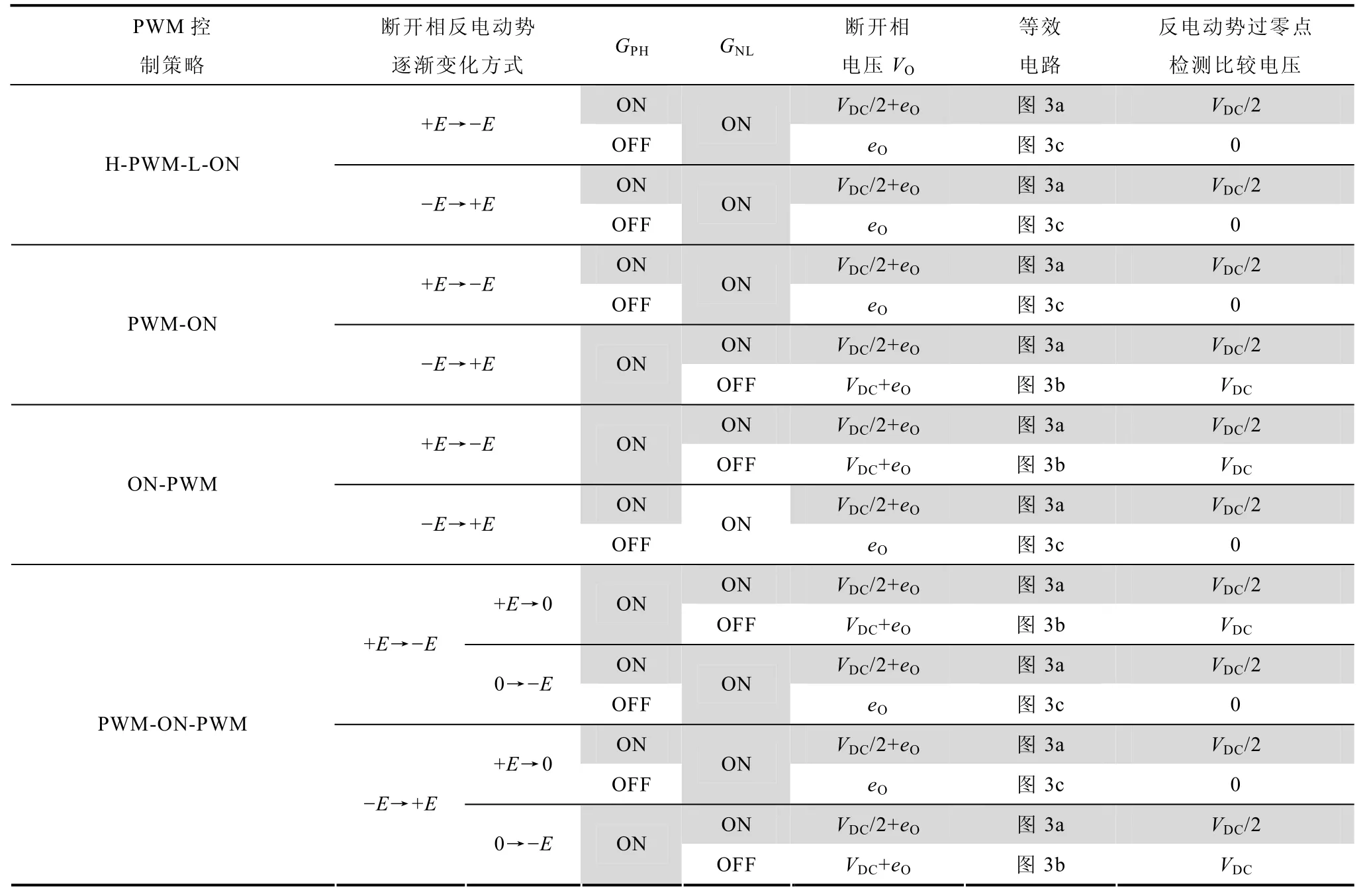
表 不同PWM调制策略的断开相端电压Tab. Terminal voltage of open-phase in different PWM modulation modes

图4 检测电路图Fig.4 Detection circuit diagram
4 实验验证
为了验证理论分析的正确性,搭建了一套无刷直流电机调速系统进行了实验。电机参数为:额定电压为36V,额定转速为2000r/min,逆变器开关频率为16kHz,控制器采用EPF6024可编程芯片。不同PWM调制技术、不同转速下,断开相端电压VO、反电动势过零点信号 ZO、等效的上下管驱动信号GPH和GNL实测波形如图5和图6所示。

图5 电机转速为100r/min时,不同PWM调制方式下,VO,ZO,GPH和GNL的实验波形Fig.5 Experimental waveforms of VO, ZO, GPHand GNLunder different PWM modulations when motor rotational speed is 100r/min

图6 电机转速为1800r/min时,不同PWM调制方式下,VO,ZO,GPH和GNL的实验波形Fig.6 Experimental waveforms of VO, ZO, GPHand GNLunder different PWM modulations when motor rotational speed is 1800r/min
从图5和图6中可以发现,不同的调制方式,断开相端电压VO的波形并不相同,但在5%~100%的电机速度范围内,不论等效上管驱动信号 GPH采用何种PWM调制方式,也不论断开相端电压VO的波形如何变化,在PWM开通期间,当断开相绕组端电压 VO=VDC/2时,ZO就出现一个跳变,这说明检测的反电动势过零点与PWM调制方式无关。
不同PWM调制技术、不同转速下,A相端电压Va、A相反电动势ea、A相绕组电流ia、AH开关管驱动信号GAH实测波形如图7和图8所示。
从图7和图8可以看出,在5%~100%的电机速度范围内,不同的调制方式下,尽管电机A相端电压的波形有差异,但不论何种PWM调制方式,A相绕组电流ia出现的时刻与该相反电动势ea平顶出现的时刻,以及两者平顶部分的宽度完全一致,即电机都能准确换相。
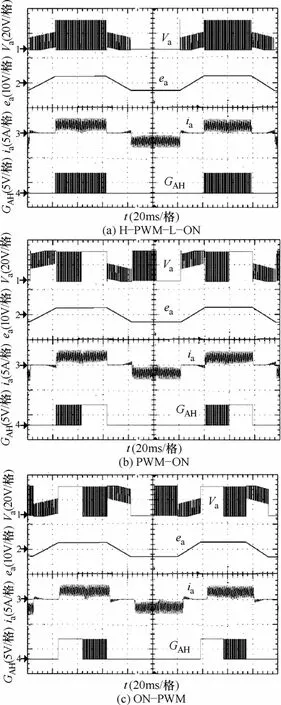
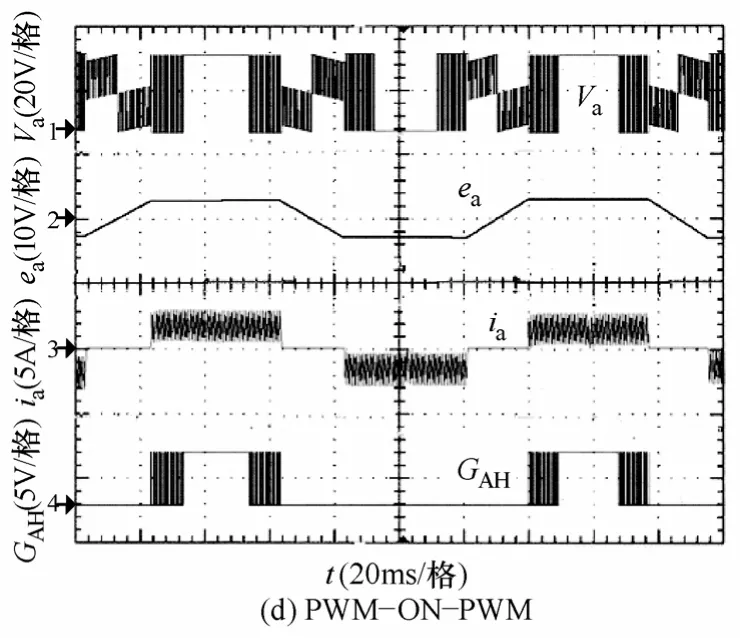
图7 电机转速为100r/min时,不同PWM调制方式下,Va,ea,ia和GAH的实验波形Fig.7 Experimental waveforms of Va, ea, iaand GAHunder different PWM modulations when motor rotational speed is 100r/min


图8 电机转速为1800r/min时,不同PWM调制方式下,Va,ea,ia和GAH的实验波形Fig.8 Experimental waveforms of Va, ea, iaand GAHunder different PWM modulations when motor rotational speed is 1800r/min
5 结论
本文提出了一种通过在 PWM 开通期间采样断开相端电压与 1/2的母线电压相比较直接检测反电动势过零点的方法,该方法既保留了已有直接反电动势法无需重构电机中性点,无需使用滤波电路的优点,同时又能适应于半桥调制、全桥调制和PWM-ON-PWM调制等各种PWM调制方式。实验证明,该方法可以在 5%~100%的速度范围内良好地工作,整个检测电路简单,具有很强的实用性。
[1] Johnson J P, Ehsani M, Guzelgunler Y. Review of sensorless methods for brushless DC[C]. Proceeding of the IEEE IAS Conference, 1999, 1: 143-150.
[2] Iizuka K, Uzuhashi H, Kano M, et al. Microcomputer control for sensorless brushless motor[J]. IEEE Transactions on Industry Applications, 1985, 21(4): 595-601.
[3] Jung D H, Ha I J. Low cost sensorless control of brushless DC motors using a frequency-independent phase shifter[J]. IEEE Transactions on Power Electronics, 2000, 15(4): 744-752.
[4] Su G J, Mc Keever J W. Low cost sensorless control of brushless DC motors with improved speed range[J]. IEEE Transactions on Power Electronics, 2004, 19(2): 296-302.
[5] Yong Ho Yoon, Tae Won Lee, Sang Hun Park, et al. New approach to rotor position detection and precision speed control of the BLDC motor[C]. IEEE Industrial Electronics, IECON 32nd Annual, 2006, 11: 1305-1310.
[6] Ogasawara S, Akagi H. An approach to position sensorless drive for brushless DC motors[J]. IEEE Transactions on Industry Applications, 1991, 27(5): 928-933.
[7] Shao J, Nolan D, Hopkins T. A novel microcontroller based sensorless brushless DC (BLDC) motor drive for automotive fuel pumps[J]. IEEE Transactions on Industry Applications, 2003, 39(6): 1734-1740.
[8] Shao J, Nolan D, Hopkins T. Improved direct back EMF detection for sensorless brushless DC (BLDC) motor drives[C]. Proceeding of IEEE APEC, 2003: 300-305.
[9] Yen Shin Lai, Young Kai Lin. A unified approach to back-EMF detection for brushless DC motor drives without current and hall sensors[C]. IEEE Industrial Electronics, IECON 32nd Annual, 2006, 11: 1166-1171.
[10] Microelectronics ST application note AN1130.An introduction to sensorless brushless DC motor drive applications with the ST72141.website www.st.com.
[11] 张磊, 瞿文龙, 陆海峰, 等. 一种新颖的无刷直流电机无位置传感器控制系统[J]. 电工技术学报, 2006, 21(10): 26-30. Zhang Lei, Qu Wenlong , Lu Haifeng, et al. A novel sensorless control system of brushless DC motors [J]. Transactions of China Electrotechnical Society, 2006, 21(10): 26-30.
[12] 张磊, 肖伟, 瞿文龙. 直接检测无刷直流电机转子位置信号的方法[J]. 清华大学学报(自然科学版), 2006, 45(4): 453-456. Zhang Lei, Xiao Wei, Qu Wenlong. Direct rotor position detection method for sensorless brushless DC motors[J]. Journal of Tsinghua University (Sci&Tech), 2006, 45(4): 453-456.
A Unified Approach to Direct Back EMF Detection for Brushless DC Motor
Xue Xiaoming1Yang Chong2
(1. Changzhou College of Information Technology Changzhou 213164 China 2. Jiangsu University of Science and Technology Zhenjiang 212003 China)
The direct back electromotive force(EMF) detection method by synchronously sampling the motor back EMF during the pulse width modulation (PWM) off time has been extensively applied in a sensorless brushless DC (BLDC) motor drive. But this direct back EMF sensing scheme is only suitable for the mode whose high side switch is PWM and low side switch is on. On the basis of the research into the traditional model and the working principle of the brushless DC motor, a simplified model of the brushless DC motor is formulated, by which an analysis of the voltage characteristics under different PWM technologies is made. A method of obtaining the back EMF zero-crossing information by comparing the open phase voltage with one half of DC link voltage during PWM on time is proposed and experimented on the prototype. The experimental results show that the proposed control algorithm does satisfactory performance over a wide operation range under various PWM modulation modes.
Direct back electromotive force detection method, brushless DC motor, PWM, sensorless, rotor position detection
TM351
薛晓明 男,1965年生,研究员级高工,硕士生导师,研究方向为开关电源和无刷直流电机控制技术。
2009-06-26 改稿日期 2010-05-15
猜你喜欢
大电机技术(2022年5期)2022-11-17
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
电子制作(2017年1期)2017-05-17
电源技术(2016年12期)2017-01-10
微特电机(2016年3期)2016-11-29
电气传动(2015年11期)2015-06-10
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
科技视界(2012年18期)2012-08-16