
舞台吊杆变频矩阵切换控制系统*
2010-12-02 06:04陈积远
外语与翻译 2010年3期
陈积远
(浙江春宇舞台设备有限公司,浙江杭州311602)
舞台吊杆变频矩阵切换控制系统*
陈积远
(浙江春宇舞台设备有限公司,浙江杭州311602)
介绍了吊杆变频矩阵切换技术在舞台吊杆控制中的应用,着重介绍变频切换的难点及变频调节。
矩阵切换技术;PLC;变频器;CANpen总线
近年来,随着国内社会经济的提高,民众的文化生活日新月异,对文化设施的需求迅速提高,舞台机械的发展遇到了前所未有的机遇。舞台机械的控制系统则成为舞台机械发展最重要的组成部分。
舞台吊杆是各类剧场中最常用的必需设备,其控制至关重要。早期的吊杆采用简单固定速度的继电控制,为适合现代舞台演出要求,近几年国内相继建成的大剧院均采用变频调速的控制方式。调速分为一对一、一对多、矩阵切换三种方式。三种方式中一对一大多在大剧院中使用,如国家大剧院、杭州大剧院等;一对多一般在小型剧院或小型会议室使用;矩阵切换则在中型剧院中使用。
随着演出要求越来越严格,舞台吊杆的稳定、安全性优为重要,控制上必须达到电梯控制要求。在一个剧场中,吊杆的数量一般达到40道以上。考虑到成本因素,开发了舞台机械吊杆变频矩阵控制技术。
本文以8台变频器切40道吊杆为例。
一、系统配置
吊杆系统主要由机械部分和电气部分组成。
(一)机械配置
电机选用三相交流变频电机,带双制动抱闸。卷扬机装有超载,超行程等检测保护装置。在卷扬机的卷筒上安置防松绳检测开关、防跳槽压轴滚。
(二)电气配置
舞台机械计算机控制系统基于成熟的可编程控制器(PLC)技术开发,具有上、下位结构。系统PLC部分采用法国施耐德公司M340系列产品和性价比较高的产品设计方案,实现了舞台设备的实时控制。主处理器模板选用M340 BMP20102,集成以太网接口,大大提高了通讯的可靠性。系统高性能的产品和设计充分保证了应用指令运行时间、扫描周期、存贮器(EPROM)的容量等性能参数均满足实时控制与操作系统的要求。系统具有软上下限位和机械上下限位功能。
整个控制系统具备主控制室冗余计算机操作和电动备份操作,使得系统操作达到了高度冗余。针对剧场中经常出现的因互锁、联运及元器件的质量引起的设备故障,在系统设计及元器件选型上均做了相应处理,吊杆要求“定位精度”、“同步精度”,在设计中都做了相应的处理。编码器选用瑞士ELCO绝对值编码器;系统上位机选用工业控制触摸屏显示数字和动态图表示吊杆高度位置,所有的输入按钮设定在触摸屏上大大地降低系统由于按钮引起的故障率;低压电器选用施耐德,欧姆龙合资产品。
二、吊杆系统设计
系统以研华工业控制计算机和触摸屏为上位机,通过以太网交换机SP IDER 3TX-TAP实现M340 PLC和工控机、触摸屏开放式数据交换。Ethernet TCP/IP网络大大提高了数据传输效率。M340 PLC具有出色的处理能力,能精确进行整数和浮点数运算,实现吊杆位置存贮、程序处理、命令发送、限位信号接收、编码器信号接收、远程I/0通讯等功能;M340通信功能,除集成USB口外,CPU模块内置2个通讯接口(CANopen,Ethernet或Modbus),确保能够方便高速地连接。本设计中使用CANopen总线技术提供了分布式控制系统的一种实现方案,实现主站PLC和远程I/O、ATV71矢量变频器之间的数据互动。系统对速度、位置信号进行采集,实现闭环控制。系统逻辑图如图1。
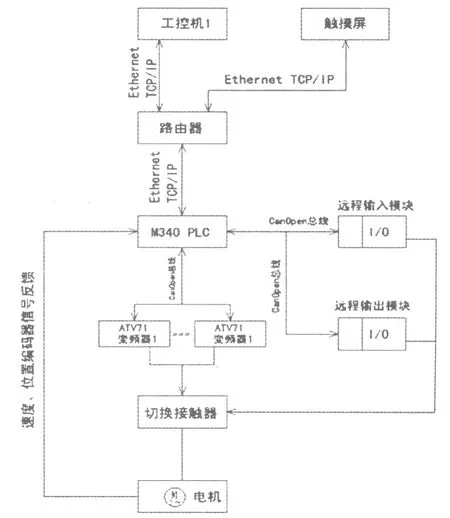
图1 系统逻辑图
(一)系统功能
系统以工控机、触摸屏做上位机。操作界面用VC编写,软件提供正常情况下的全功能控制与操作,包括单体设备的控制、设备联锁、设备状态监视、预选择设备、设定运动参数、编组运行、场景记忆、场景序列、故障诊断、系统维护、互联网的联机操作向导等。主要操作以屏幕窗口、图形、表格方式结合功能键盘或鼠标。
上下数据软限位可控制吊杆的上下运行行程,可由键盘输入设定,也可设一个机械限位做零点;通过速度输入窗口可以设定吊杆电机的运行速度,在缺省对设备的速度设定或无法进行速度设定时,设备按照系统默认的速度运行;软件能自动记录所有的操作、控制及设备的运行和故障信息,并能打印出来;系统提供满足装台、排练、演出等过程所要求的操作功能(场景记忆、场景序列、系统提示、离线仿真等)。
本系统中最多能同时运行8道吊杆。
(二)定位精度控制
所谓定位指得是根据演出的要求,指定演出所需的使用位置。需要应用该定位时,用手或鼠标轻触定位按键,吊杆自动运行到位。定位误差控制在+3mm以内。吊杆使用定位时,必须设定一定的速度,否则吊杆将按PLC程序给定的默认速度运行;吊杆运行到上下数据限位或上下机械限位时,PLC会发出停止命令,该号杆停止运行。
吊杆定位精度的控制在PLC里实现,PLC程序通过编写一个定位程序控制块来实现,该控制块里包含定位偏差纠正程序、定位提前数据处理程序、定位运行条件程序。吊杆定位启动后,PLC根据编码器反馈的当前高度值与所要定位的高度相比较,当两者绝对值小于600mm时,PLC通过CANopen总线给变频器一个8Hz的低速频率,变频器开始低速运行,直至定位的提前量到达,变频器便停止运行。变频器停止运行后吊杆因机械负载、钢丝绳拉升等原因产生几个毫米的惯性,惯性消失后吊杆刚好到达定位位置,精确实现定位精度控制。PLC记录提前量的计算方法是通过读取吊杆上两次偏差值,将两次偏差取算术平均值。
三、变频矩阵切换控制
变频矩阵切换包含变频器和切换接触器两部分。
(一)变频器
变频器用来改变吊杆的运行速度,其参数设置优为重要。本设计中,CANopen总线通讯比特率选500K/s,变频器地址分别设为1到8,远程输入模块9,远程输出模块为10。将ATV71变频器的宏设置项设置为起重提升,低速频率设为3.5Hz,高速频率设为默认的60 Hz,加速时间2S,减速时间1S,刹车释放频率设为自动,抱闸频率3.5hz,刹车抱紧时间0.1s,刹车机构抱紧时间1.5s,R2继电器设为制动逻辑控制。
变频器必须在相应的矩阵切换接触器吸合后才允许起动,否则变频器会因缺相跳闸。在调试过程中发现将抱闸频率设为自动,吊杆会溜杆,定位精度也无法达到+3mm,因此变频器必须设定抱闸频率,其设定必须在吊杆满负载的情况下进行。慢慢的从1Hz开始加到3.5Hz,通过各项测试3.5Hz是最佳的抱闸频率。调试时发现吊杆下降停止后会向上微抖动,将变频器1.7应用功能项中的制动力方向设为是,吊杆停止稳定、无任何抖动。
当变频器出现故障或该号变频器CANopen总线出错时,其他变频器不受干扰,能正常运行吊杆。
(二)矩阵切换接触器控制
矩阵切换接触器控制较为复杂,远程输出模块控制接触器线圈,将接触器主电路接成矩阵模式,本设计以8切40为例,如图2。

图2 矩阵切换主电路图
图2中K M代表接触器,M代表电动机,3代表三相交流电机。PLC程序中要十分重视接触器之间的互锁。本图中1K M1、2K M1、3K M1、4K M1、5K M1、6K M1、7K M1、8K M1接触器,同时只允许一只启动;1K M1、1K M2至1K M40接触器也只允许同时运行一只。矩阵切换接触器共用320只,其中一个变频器串接40个接触器,相当于每道吊杆并接8个接触器。
考虑到安全,系统配置远程输入模块,对接触器的动作进行监控。PLC程序中还要考虑切换接触器的动作与变频器、抱闸接触器的搭配问题。变频器必须在切换接触器接通后方能启动,变频器运行中切换接触器不允许断开,只有在变频器停止后切换接触器才允许断开。通过测试,刹车抱紧时间为0.1 s,刹车机构抱紧时间为1.5 s。程序设定切换接触器断开时间为1.7 s。
320只接触器的总成本与2个变频器的价格相当,采用矩阵切换控制的成本是变频器一对一的四分之一,具有较高的推广价值。
四、结 语
该变频矩阵切换控制系统已经在五个剧场中使用,经历上百场各类大中型演出,运行平稳,无任何故障,完成能满足演出要求,值得在全国各中型剧场应用。
[1]段慧文.现代舞台机械的控制系统[J].演艺设备与科技,2005,10(4):45-49.
[2]WH/T 37-2009.舞台机械操作与维修导则[S].
[3]WH/T 28-2007.中华人民共和国行业标准[S].
2010-05-17
陈积远(1980-),男,福建寿宁人,工程师。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
石家庄铁道大学学报(自然科学版)(2022年2期)2022-06-24
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
公路交通技术(2019年2期)2019-04-28
电子制作(2019年7期)2019-04-25
铁道建筑(2018年7期)2018-08-01
电子制作(2018年13期)2018-07-27
电子制作(2017年7期)2017-06-05
河南城建学院学报(2015年1期)2015-12-04
