天空偏振光分布的实验研究
2011-02-21 05:35关桂霞晏磊陈家斌吴太夏吴波
兵工学报 2011年4期
关桂霞,晏磊,陈家斌,吴太夏,吴波,5
(1.首都师范大学 信息工程学院,北京100037; 2.北京大学 空间信息集成与3S 工程应用实验室,北京100871;3.北京理工大学 自动化学院,北京100081; 4.中国科学院遥感应用研究所,北京100101;5.中国矿业大学机电与信息工程学院,北京100083)
偏振光导航是自然界中天然导航方法之一。很多动物,包括蚂蚁、蜜蜂、蟋蟀和候鸟,都能利用太阳光在大气中散射的偏振特性进行导航。瑞士生物神经学家Wehner 从20世纪60年代开始对昆虫的偏振视觉导航进行研究时发现,沙蚁、蟋蟀等昆虫能够利用偏振光进行导航是因为天空中存在一个偏振光的模式图,同时它本身具有对太阳光偏振方向极为敏感的视觉神经系统[1]; 1974年Wellington 发现了大黄蜂的偏振导航手段[2]; 1999年瑞典科学家Dacke 等发现某些动物可以利用月光的偏振来进行导航定位[3]; Oren 等于2003年发现蝴蝶依靠生物钟和偏振罗盘联合导航进行长距离迁徙[4]; Rachel Muheim 等于2006年实验验证了一些候鸟通过准确的偏振罗盘来校准它们的地磁罗盘[5];Lambrions 等将偏振导航系统装配在机器人Sahabot 上,利用机器人进行了导航精度的试验[6]; 在国内,中科院生物物理所沈钧贤研究表明铺道蚁能够利用太阳光的偏振进行导航[[7];大连理工大学褚金奎等试制了利用偏振光导航的原型装置[8]。
目前国内外对偏振光导航的研究主要集中于生物学研究,如发现哪些生物具有偏振光导航能力,并且从多方面验证其导航能力,偏重于偏振光导航的现象和原理;由于大气的非均质性影响,导致了大气偏振光模式图的不稳定性,这大大降低了偏振光导航的精度,影响了偏振光导航的适用性和实用化,因而真正将偏振光应用于导航的研究相对较少。本文主要研究了观测波段、天气条件以及太阳高度对天空偏振光分布模式的影响情况,目的是尽可能减少外界条件对偏振光导航的影响,为建立更精确的偏振光导航模型提供实验与理论基础,推进偏振光导航向实用化方向发展。
1 天空偏振光分布数学模型
在晴朗无云的条件下,大气对于太阳光的散射主要是Rayleigh 散射,散射出射的光线主要是部分偏振光,以偏振度和偏振方位角来描述。为方便对天空的偏振度以及偏振方位角进行描述,建立了天空偏振的模型图采用地平坐标系[9]。
图1为地平坐标系,S 为太阳,OP 为天空中观测的方向,Z 为天顶。由Rayleigh 散射理论可知,待测光束的E-矢量振动方向垂直于S、地面观察点O和天空中观察方向P 点的所构成的平面。偏振方位角ψ 定义为天空中观察方向P 点的E-矢量振动方向与过P 点子午线(弧ZP)的夹角。而P 点的E-矢量振动方向垂直于PS,ψ=90° -∠ZPS.

图1 天空P 点E 矢量偏振信息Fig.1 Sky E-vector polarized information at point P
在球面△ZPS 中,由球面三角形的余弦定理知

得

式中: θ 为入射光方向OS 与观测方向OP 的夹角;hS为太阳的高度角;AS为太阳的方位角;hP为球面天空中观察点P 的高度角; AP为观察点P 的方位角。由坐标转换正南方向代表着方位角0°,正西方向代表方位角90°.
在球面△ZPS 中,由球面三角形的正弦定理知

得

同时

由(2)式和(3)式可以计算出天空中观测方向光束的偏振度P 和偏振方位角ψ,如图2所示。这就是说,在一天的某一时刻、某一位置,天空中具有相对稳定的偏振模式。
天空中的偏振模式图与太阳高度角(即时刻)密切相关,图2为不同太阳高度角时天空中的偏振模式图,图中黑色线条的方向表示偏振方向、线条的宽度表示偏振度,即偏振强度的大小,阴影部分表示人眼可观测到的天空部分。偏振模式图有2 条鲜明的对称线:一条是与太阳或反太阳点相距90°角距的大圆,在该圆上偏振度最大;另一条是太阳与反太阳点的连线,在这条对称线上,偏振角是垂直的。这种偏振模式是由大气的自身性质(介质特征、结构特征等)决定的。
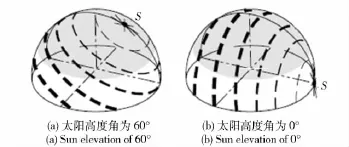
图2 不同时刻天空中的偏振模式图Fig.2 Sky polarization pattern at different times
2 天空偏振模式图测量模型
上述理想大气条件下的天空偏振分布模型模拟出来的大气偏振模式图能够大致反映大气偏振分布状态,但由于影响大气偏振分布的因素较多,如大气粒子数多少、粒子大小、天气状况以及测量波段等,都可能对大气偏振模式图造成很大的影响[10-11],因此当利用天空偏振模式图进行更深入研究或应用时,如利用偏振模式图寻求偏振导航基准线时,就需要考虑更多的影响因素,以使结果更接近实际条件,提高模型的准确度。下面讨论了大气偏振模式在不同天气条件下,不同测量波段的分布状况。
在偏振测量时,通常把斯托克斯矢量写成S =(I,Q,U,V)T的形式。其中I 为非偏振光强; Q,U分别为2 个方向上的线偏振光; V 为圆偏振光。通常圆偏振分量在仪器可以检测的范围内忽略不计。选任一坐标平面xOy 内,在与x 轴的夹角为α 的方向上进行观测所得的光强

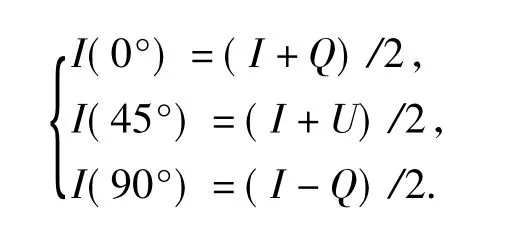
研究采用全天空偏振测量方法,测量仪器自制,主要组成部分为:尼康D200 数码相机、鱼眼镜头和偏振片。在数码相机前加装鱼眼镜头(保证视角接近180°),并在镜头前加装偏振片,通过3 次不同偏振方位角的测量,测出3 个不同角度的线偏振光的光强I(αi),就可以联立求出Stokes 四个参量的前3个I、Q 和U,进而可求得对应的偏振度P 和偏振方位角θ,实际测量时分别取α 等于0°、45°、90°的3个观测方向,得到联立方程
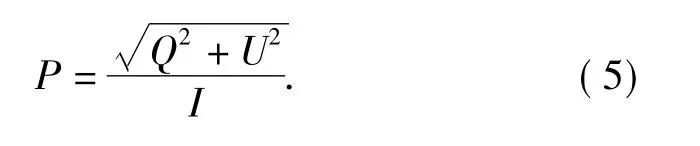
化简可得I,Q,U 的值,对应的偏振度
3 天空偏振光分布测量及分析
3.1 全波段测量结果
图3为在不同天气条件下观测到的天空偏振光分布情况。由于天空偏振光分布与大气粒子对太阳光的散射密不可分,对晴天及多云天气的天空偏振度分布进行了比较研究。图3(a)为晴朗无云的天气条件下全天空偏振度影像,图3(b)为多云天气下全天空偏振度影像。全天空偏振影像由上述天空偏振模式图测量模型生成。
图3(a)中环状中心区域为大气偏振中性点位置,即天空中大气偏振度为0 的点。从晴朗天空的图像可以看出,大气偏振度围绕偏振中性点呈现有规律的环状分布,从中性点向外偏振度逐渐变大,达到最大的深色区域后又逐渐减小至另一个中性点(由于视场角的原因,这个中性点在图中并没有表示出),与理论模型的结果相符。图3(b)有云状态的影像与晴朗天空的影像有一定的相似处,天空的偏振度也是随着中性点呈环状分布,但这个分布不是十分的规则,在图像的西北角有一个偏振度较低的灰色区域,是另一个偏振中性点的位置,此处也未能表示出来;有云状态下偏振度的分布相比晴朗天空下偏振度的分布灰度减小,这是由于有云状态下大气的多次散射造成的一种退偏振效应,将天空影像的偏振度减小了。

图3 偏振度在不同天气条件下的分布情况Fig.3 Polarization degree distribution at different weather conditions
为了得到全天空偏振度及偏振角在一段时间内的分布规律,对天空偏振度分布进行了连续观测实验。图4为2008年9月1日(晴天)中午11:00~16:00 每隔1 h 对全天空进行拍摄,连续7 h 观测到的中关村地区天空偏振光分布情况。实验地点为北京大学遥感楼5 楼平台。从单个的偏振度分布影像来看,与图3的偏振度分布有一定的相似之处。但不同太阳高度角的偏振度分布的形状和大小都是不同的,在太阳高度角较高即接近中午的时候,天空中可以观测到2 个环状分布,整个天空的偏振度分布是这2 个环状分布的叠加。而随着时间的推移可以发现另外一个环形逐渐消失。对图4的各个偏振度影像分别进行亮度统计,取整个影像偏振度的平均值。如图5所示。从图中可以看出,从上午10:30~12:00,偏振度影像的平均值逐渐变小,至太阳高度角最大(12:00)时达到最小,然后随着时间推移,偏振度影像的平均值逐渐变大。从图4和图5的结果可以得出,不同太阳高度角其偏振模式图也不相同,偏振光的强度与方向都有差异,太阳高度角低的时候,天空中的偏振强度比较大,也就是说傍晚或早晨的时候天空中偏振强度比中午时大。
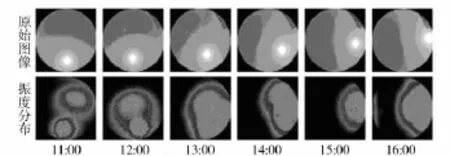
图4 晴朗天空偏振度随太阳高度角变化情况Fig.4 Polarization degree distribution along with solar elevation at clear sky condition
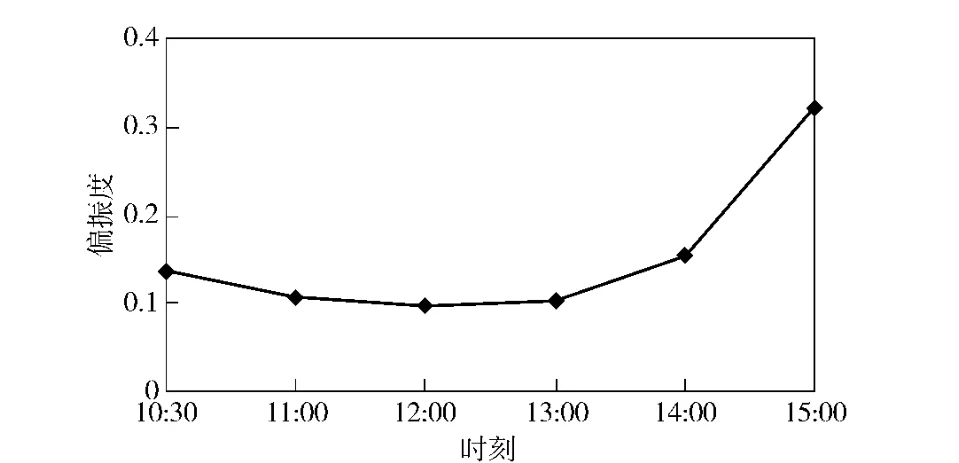
图5 偏振度平均值与太阳高度角的关系图Fig.5 Relationship between average polarization degree distribution and solar elevation
3.2 分波段测量结果
图6、图7分别为晴天和阴天2 种天气条件下天空偏振度在紫、蓝、红3 个波段的分布情况。每组图中的3 幅图像拍摄的时间大致相同,前后相差不到3 min.
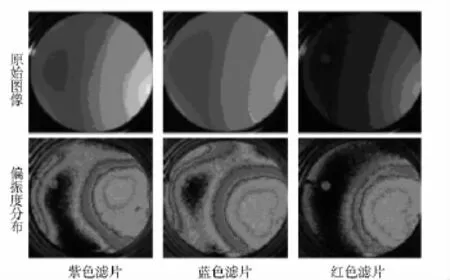
图6 晴朗天空不同波段的天空偏振度分布Fig.6 Polarization degree distribution of clear sky in different bands
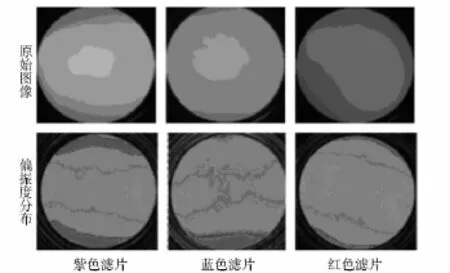
图7 细雨天气不同波段的天空偏振度分布Fig.7 Polarization degree distribution of drizzle sky in different bands
从图6晴朗天空条件下可以直观看出,紫、蓝、红3 波段的偏振度分布是不同的,天空偏振度围绕偏振中性点(图中环状中心)有规律地分布,与理论模型结果相近,但3 个波段的偏振度分布中偏振中性点的位置有所差异,最大偏振度(图中黑色区域)出现的区域也不尽相同。
图7为阴天条件(天空阴沉,伴有细雨)下天空偏振度分布图,有2 个中性点出现,不同波段天空偏振的中性点及偏振度分布也是相似但各不相同。
为了说明不同观测波段天空偏振度的强度大小,分别将图6和图7中不同波段的偏振度影像的偏振度取平均值。晴朗天空在紫、蓝、红3 个波段偏振度影像的偏振度平均值分别为0.136、0.152、0.360;阴天天空在紫、蓝、红3 个波段偏振度影像的偏振度平均值分别为0.109、0.136、0.102,如图8所示。实验中无论晴朗或阴天天空,其偏振度平均值均高于5%的探测门限,满足利用偏振光导航所需偏振度大小的最低要求。晴朗天空的偏振度随着观测波长的变长,其偏振度的值在增长;而多云天气蓝波段偏振最大,紫波段和红波段相对较小。从图8中还可以看出,3 个波段的多云天气的平均偏振度均小于晴朗天气的平均偏振度,这也说明阴天条件下,大气粒子多次散射产生比较强烈的退偏振效应,致使整个影像的偏振度大大降低,这表明蓝波段是更适用于偏振光导航的探测波段。
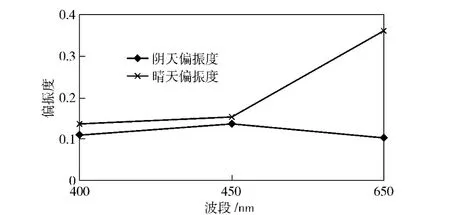
图8 不同波段偏振度影像的偏振度平均值Fig.8 Average polarization degree images in different bands
4 结论
1)大气偏振度围绕偏振中性点呈现有规律的环状分布;有云状态的影像与无云状态的影像有一定的相似处,但由于大气粒子多次散射的作用,有云状态下的偏振度比晴朗天空的偏振度明显减小。
2)在全波段测量时,天空偏振度分布与太阳高度角密切相关,随着太阳高度角的变化,天空偏振的形状和大小都发生着变化,太阳高度角低的时候,天空中的偏振强度比较大,也就是说傍晚或早晨的时候天空中偏振强度比中午时大。
3)在分波段测量时,相同条件下不同波段天空偏振度分布有差异。晴朗天空的偏振度随着观测波长的变长而增大,而多云天气条件下长波段对偏振度衰减影响较大,短波段相对稳定,分析结果表明蓝波段更适合用于偏振光导航的探测波段,这为后续偏振光导航测角平台的设计提供了理论依据。
References)
[1]Wehner Rudiger,Menzel Randolf.Homing in the ant cataglyphis bicolor[J].Science,1969,164: 192 -194.
[2]Wellington W G.Bumblebee ocelli and navigation at dusk[J].Science,1974,183: 550 -551.
[3]Dacke M,Nilsson D E,Warrant E J,et al.Built-in polarizers form part of a compass organ in spiders[J].Nature,1999,401:470 -473.
[4]Froy O,Gotter A L,Casselman A L,et al.Illuminating the circadian clock in monarch butterfly migration[J].Science,2003,300: 1303 -1305.
[5]Muheim Rachel,Phillips John B.Susane Akesson.Polarized light cues underlie compass calibration in migratory songbirds[J].Science,2006,313: 837 -839.
[6]Lambrinos D,Möller R,Labhart T,et al.A mobile robot employing insect strategies for navigation[J].Robotics and Autonomous Systems,2000,30 (1): 39 -64.
[7]徐智敏,沈钧贤.蚂蚁捷径返巢及其朝向机制的研究[J].昆虫学报,2000,43(3):242 -247.XU Zhi-min,SHEN Jun-xian.A study on direct homing and underlying orientation mechanism in the ant Tetramorium caespitum[J].Acta Entomologica Sinica,2000,43(3):242 -247.(in Chinese)
[8]Chu Jinkui,Zhao Kaichun,Zhang Qiang,et al.Construction and performance test of a novel polarization sensor for navigation[J].Sensors and Actuators A: Physical,2008,148:75 -82.
[9]房建成,宁晓琳.天文导航原理及应用[M].北京: 北京航空航天大学出版社,2006.FANG Jian-cheng,NING Xiao-lin.The principle & application of astro-navigation[M].Beijing: Beihang University Press,2006.(in Chinese)
[10]Pomozi Istvan,Horvath Gabor,Wehner Rudiger.How the clearsky angle of polarization pattern continues underneath clouds:Fullsky measurements and implications for animal orientation[J].The Journal of Experimental Biology,2001,204: 2933 -2942.
[11]Pust Nathan J,Shaw Joseph A.Digital all-sky polarization imaging of partly cloudy skies[J].Applied Optics,2008,47(34):190 -198.
猜你喜欢
聊城大学学报(自然科学版)(2022年4期)2022-08-22
潍坊学院学报(2021年6期)2021-07-22
通信技术(2020年4期)2020-04-25
空间电子技术(2020年5期)2020-03-11
电子制作(2019年12期)2019-07-16
现代职业教育·中职中专(2018年11期)2018-06-11
电子制作(2017年1期)2017-05-17
光学仪器(2016年6期)2017-04-24
山东工业技术(2016年15期)2016-12-01
电子制作(2016年1期)2016-11-07