
激光通信用车载桅杆设计
2011-03-16 07:41孟立新南世君史健硕
长春理工大学学报(自然科学版) 2011年2期
孟立新,南世君,史健硕
(1.长春理工大学 空间光电技术研究所,长春 130022;2.长春理工大学 机电工程学院,长春 130022)
当今的高科技战争中,一切运动的武器平台,如坦克、步兵战车、侦察车、自行火炮、武装直升机、侦察直升机、舰船等都必须有相应的高效通信系统。大气激光通信具有通信容量大、机动性好、抗干扰能力强、保密性好,信息不易被截获,甚至在原子辐射情况下也能正常工作的优点。在地面进行激光通信,要求通信站点间能够通视,因此需要将通信光端机架设在高处——桅杆上,以克服地表建筑、植被对通信的遮挡,提高通视性,达到顺利通信。
本文对桅杆进行结构设计,并利用ANSYS分析其动态特性,对其受风载荷力进行分析,最后在真实环境做实验验证,在满足桅杆和光端机技术指标的前提下,实验结果符合设计要求。
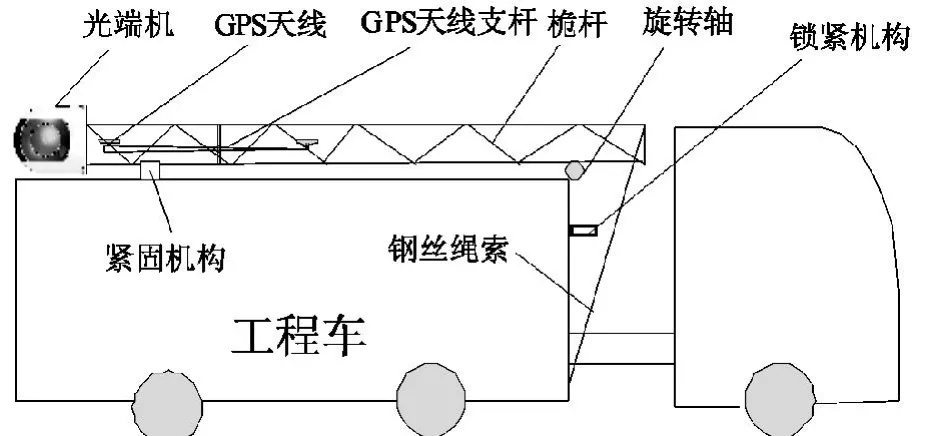
图1 非正常工作状态时,桅杆收藏图Fig.1 The diagram of mast collection when non-normal working condition
1 桅杆总体设计
在非工作状态时,桅杆通过旋转轴和紧固机构平放并固定在工程车上,如图 1所示;准备工作时,采用电机或人通过转动绞盘牵引钢丝绳索运动,使桅杆绕旋转轴旋转,到达工作位置后,用锁紧机构使桅杆竖直并固定,如图2所示。
1.1 车载桅杆及光端机主要技术指标
(1)桅杆:
高度:12m(含载车高4m);
重量:<60Kg。
(2)光端机:
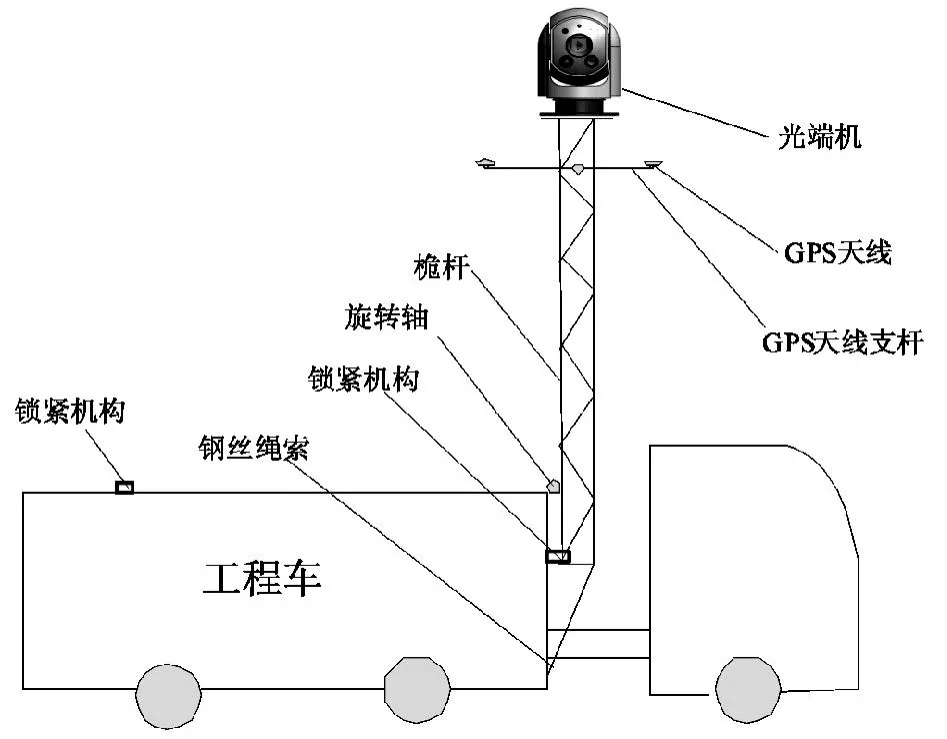
图2 正常工作状态时,桅杆架设图Fig.2 The diagram of mast erection when normal working condition
1.2 桅杆结构设计
本文设计的桅杆是在已有的通信车上使用,考虑到安装方便、固定牢固、负载轻等问题,决定采用三角形框架结构形式[1],材料用45#,周围钢管与主钢管排“人”字型焊接[2]。结构形式图如图3所示。
此设计在轴上还安装了一排作用力与桅杆和负载重力方向相反的弹簧机构-扭簧,使其一边与车体固定,另一边与桅杆轴向垂直紧贴,这样当桅杆随轴旋转的时候,扭簧产生反力,使其达到力矩平衡,减小了牵引力。扭簧结构如图4所示。

图3 桅杆结构图Fig.3 The diagram of mast structure

图4 扭簧结构简图Fig.4 The diagram of twist spring structure
1.3 桅杆模态分析
在大惯量功率系统中,都几乎共同面临着一个结构谐振问题。桅杆的结构谐振主要是由桅杆的柔性与大负载惯量引起的,它有一定的谐振频率,如果这一谐振频率接近伺服系统频宽,将使系统的稳定性受到威胁。因此,常将桅杆机械部分的固有频率设计成为驱动部分固有频率的5~8倍以上,所以要进行桅杆的模态分析,如图5所示是桅杆前6阶模态分析结果。
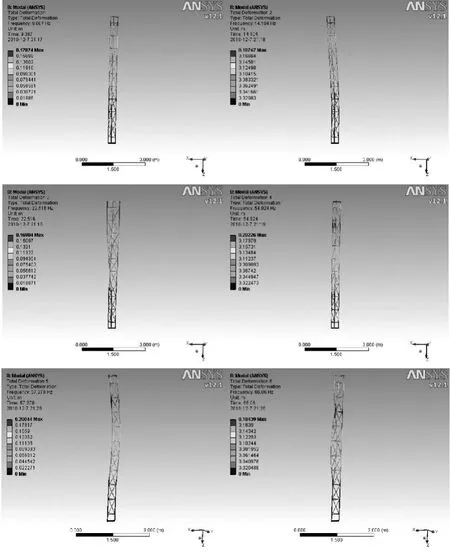
图5 桅杆前6阶模态分析图Fig.5 The diagram of modal analysis of mast for the 6 steps
前6阶模态图谱如图6所示。
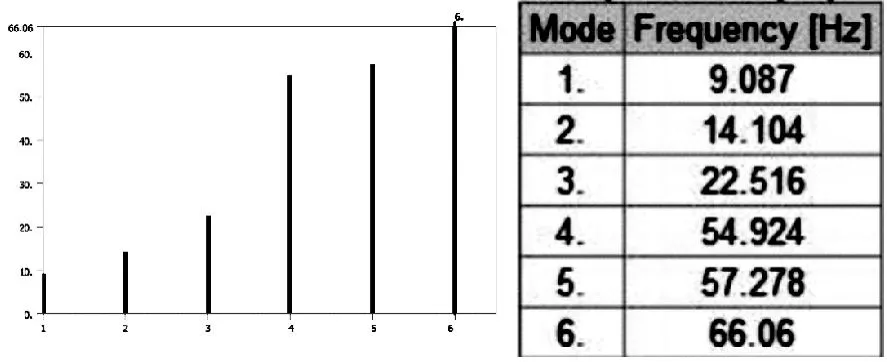
图6 系统前6阶模态分析结果图Fig.6 The diagram of modal analysis result of system for the 6 steps
通过模态分析,桅杆最低频率为9Hz,高于控制带宽设计要求。
1.4 桅杆结构谐响应分析
桅杆结构谐响应的位移和加速度如图7、8所示。
分析以上两图,得出它们共同的谐振频率约为100Hz,所以设计和使用时应避开这个频率,以克服共振、疲劳,以及受迫振动引起的有害效果。

图7 位移谐响应图Fig.7 The diagram of displacement harmony response

图8 加速度谐响应图Fig.8 The diagram of acceleration harmony response
1.5 桅杆受力分析
桅杆工作时所受外力主要有负载压力和风载荷,由于风载荷是高耸结构的主要载荷,所以风载荷是影响桅杆晃动的主要因素。
风载荷计算公式为[3]:

(1)风力系数C
风力系数与结构物的体型、尺寸等有关,对于圆管制成的框架结构C=1.3。
式中:q—计算风压,单位 N/m2;V—计算风速,单位m/s
(3)计算风压q
风压与空气密度和风速有关,按下式计算:

(4)迎风面积A
结构与其上物品的迎风面积按最不利迎风方位
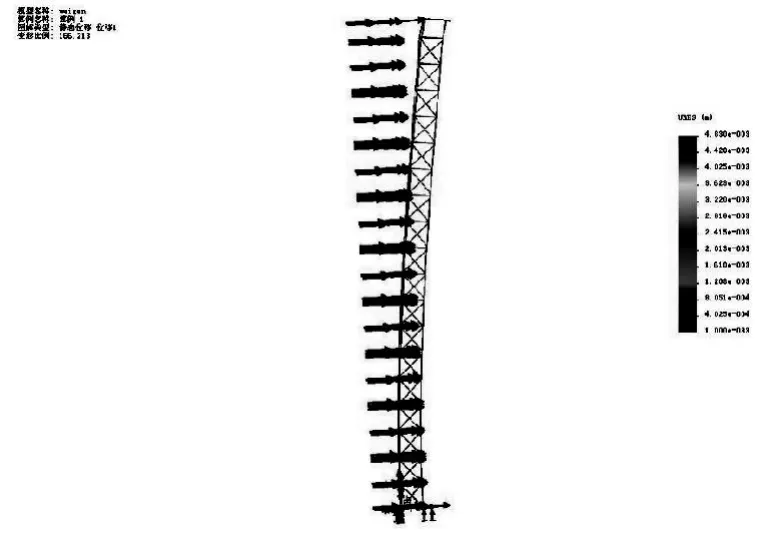
图9 桅杆变形仿真分析图Fig.9 The diagram of mast distortionsimulation analysis
计算并取垂直于风向平面上的投影面积。

经计算桅杆所受风载荷为:1.12×2N,按五级风计算,风速为8.0~13.8m/s,风载荷约为213N。
将上述计算出的风载荷213N看作分布力均匀施加在桅杆垂直表面上,如图9所示。经过变形仿真分析,计算出最大变形为4.83mm,此位移很小,符合系统要求。
2 桅杆外场实验
对于载体振动强烈的环境,稳定误差是光端机跟踪误差的主要来源之一,通信光端机所承受的振动主要由两部分组成,一是仪载车在怠速情况下,发动机的定频振动,这部分振动通过桅杆传递到光端机上,经过对桅杆振动模态分析和实际振动测试,经过桅杆衰减后,传递到光端机上的振动十分微弱,可以忽略不计;另一个是风载荷引起的低频大幅值摇摆振动,这种摇摆振动对光端机的影响较强烈。
本设计为了检测桅杆在真实工作环境中的性能,进行了原理样机室外演示验证实验。由于目前只有一台仪载车,因此将其中一个光端机架设在室内,另一台架设在桅杆上,图10为野外实验现场。

图10 野外实验现场图Fig.10 The diagram of field experiment
当桅杆处于工作状态后,首先利用 GPS测得双方的距离,其次用风速计测量环境风速,再用振动测试仪测量桅杆顶端即光端机安装座处的振动情况[4],最后利用误码仪测量通信双方的误码率,经过多次实验和测量,对光端机的跟踪精度和通信误码率进行了大量的实验,经过数据统计和处理,得到光端机的性能参数,实验条件归纳如表1。

表1 野外动态实验条件及跟踪精度统计表Tab.1 The statistics table of the wild dynamic experiment conditions and tracking precision
两次实验所测得的桅杆振动特性见图11、12。

图11 实验一时桅杆振动特性图Fig.11 The diagram of mast vibration peculiarity when experiment 1
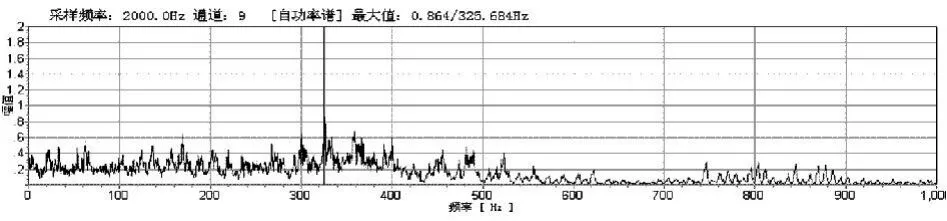
图12 实验二时桅杆振动特性图Fig.12 The diagram of mast vibration peculiarity when experiment 2
两次实验桅杆摆动特性见图13、14。
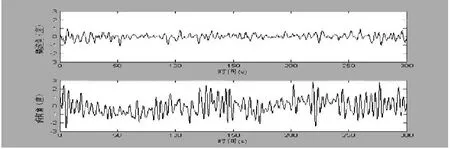
图13 实验一时桅杆摆动特性图Fig.13 The diagram of mast swing peculiarity for experiment 1
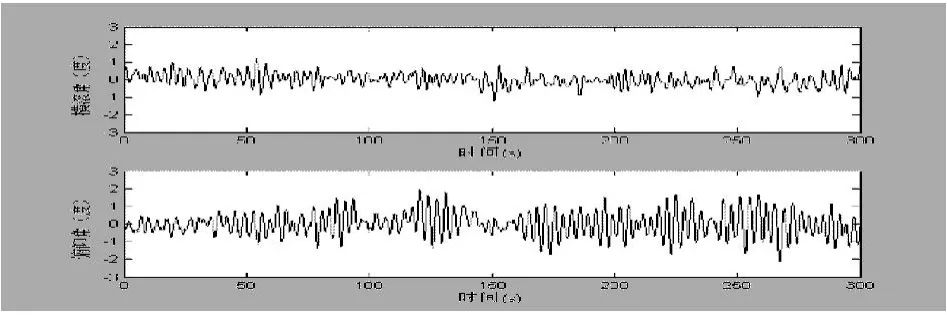
图14 实验二时桅杆摆动特性图Fig.14 The diagram of mast swing peculiarity for experiment 2
两次实验实测跟踪误差曲线见图15、16。
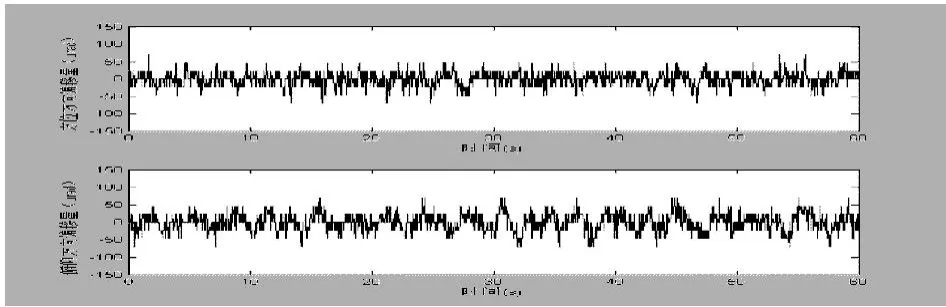
图15 外场实验一跟踪误差曲线图Fig.15 The diagram of tracking error curve for field experiment 1
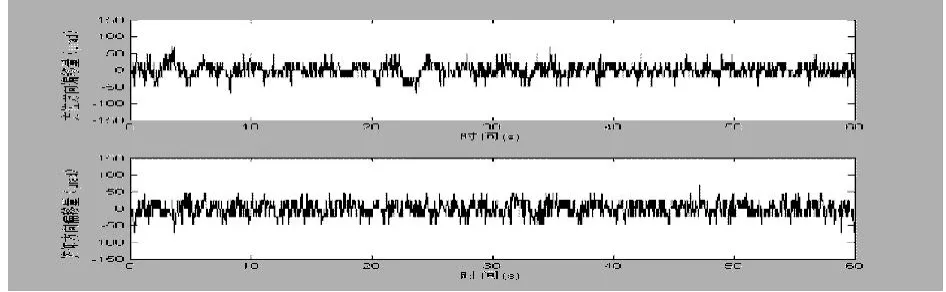
图16 外场实验二跟踪误差曲线图Fig.16 The diagram of tracking error curve for field experiment 2
对测试数据统计分析,得到表 2所示测试结果。

表2 野外动态跟踪精度测量数据Tap.2 The measurement date of the wild dynamic tracing accuracy
由实验结果可知:在不同风速、振动等动态条件下,跟踪误差满足设计要求,验证了本设计桅杆的可行性。
3 结论
本文通过对激光通信用车载桅杆进行结构设计、受力计算和有限元分析,并进行室外实验,在获得了在特定环境下的性能参数下,实践证明此桅杆是可行的。
[1]王肇民.桅杆结构[M].北京:科学出版社,2000.
[2]T.R.格尔内.焊接结构的疲劳[M].北京:机械工业出版社,1988.
[3]何庆林.桅杆计算中几个因素的综合分析[J].舰船工程研究,1997(1):20-24.
[4]邓洪洲,屠海明,王肇民.桅杆结构随机风振疲劳研究[J].土木工程学报,2003,36(4):21-22.
猜你喜欢
阅读时代(2021年6期)2021-09-10
艺术交流(2021年2期)2021-08-06
东方少年·快乐文学(2020年8期)2020-10-20
新生代(2018年20期)2018-11-13
幸福·婚姻版(2017年2期)2017-02-16
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年4期)2016-04-04
中国新技术新产品(2015年17期)2015-12-23
城市轨道交通研究(2015年3期)2015-02-27
中国交通信息化(2014年8期)2014-06-05
