区域科技与经济系统协调发展度的预测与优化控制模型的构建
2011-10-18 10:32姜钰
统计与决策 2011年6期
姜钰
(东北林业大学经济管理学院,哈尔滨150040)
区域科技与经济系统协调发展度的预测与优化控制模型的构建
姜钰
(东北林业大学经济管理学院,哈尔滨150040)
区域科技与经济系统协调发展研究的重点在于调控两者在未来发展的方向和关系。在掌握两者协调发展现状的基础上,从动态的角度预测区域科技与经济系统未来的协调发展状况,并明确未来的调控方
向和力度,对于区域科技与经济系统协调发展的研究是至关重要的。文章提出区域科技与经济系统协调发展度的预测模型,为区域科技与经济系统协调发展的宏观调控政策的制定提供决策方法和依据。
区域科技与经济系统;协调发展度;预测;优化控制
区域科技与经济系统是一类复杂系统,建立在传统经济理论基础之上的经济计量模型,强调经济系统的“线性”、“稳定性”和“确定性”,即使引入了随机项之后,也不能很好地拟和现实经济中的“非线性”、“不稳定”和“不确定性”,尤其对未来的发展状况进行预测时。基于以上考虑,本文从区域科技与经济系统协调发展度历史数据着手展开(有很多方法进行计算协调发展度,笔者也曾发表过这样的文章),构建了区域科技与经济系统协调发展度非线性自回归模型,并对模型的动态演化过程进行分析,为掌握区域科技与经济系统协调发展度的运行规律、加强区域科技与经济系统协调管理、制定相应调控政策提供依据。
1 区域科技与经济系统协调发展度非线性自回归预测模型的构建
区域科技与经济系统是复杂系统,二者的协调发展受到很多因素的影响,要找出隐匿在它们背后的动力学机制,目前还很困难。动力学预测法从系统成因出发建立动力学方程,然后根据动力学方程进行预测。唯象学预测法是一种从现象到现象的预测方法,它通过现象看本质,以大量现象为依据,探讨事物发生和发展的规律。由于这种方法不要求知道系统的输入和输出之间的完全因果关系,只要根据系统的输出就可以对系统进行辨识来建立模型,因此显得简便实用。如果仅仅从现象出发,建立预测模型,则可以找到一条绕开寻求动力学机制困难的途径。
这方面工作最早出现于物理学研究领域,1991年高登在社会经济领域作了尝试。物理学中是利用混沌系统的状态轨迹的分形特征来建模预测的,高登的方法是根据二次多项式函数能够产生混沌现象这一特征,将一组不规则数据看成是服从一个假定的二次多项式函数,用回归分析技术辨识方程参数,得到相应模型,实现短期预测,称之为非线性回归分析法。刘洪[1]根据经济混沌预测的原理,利用状态空间中混沌吸引子的吸引性、稳定性等特征,通过建立临界状态点预测函数,以达到短期预测的目的。利用上述方法[2][3]建立协调发展度预测模型,设区域科技与经济系统的协调发展度序列{Tt},进行非线性自回归,不失一般性,可以设Tt的非线性自回归模型为

其中:α,β<0,γ可正可负。
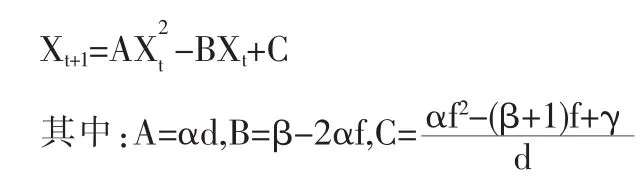
为了判断上式的长期性态,我们有必要找到与其等价的非线性动力学模型。所谓等价意指长期性态不变,为此作变量替换:
代入(1)式中
如果C=0即:

若要(3)成立,则:

(2)式可改写为
令Xt=B/AYt,K=-B则:

式(4)为著名的单种群模型(Logistic map)。
2 区域科技与经济系统协调发展度预测模型的动态演化
令f(Yt,K)=KYt(1-Yt)
则一次映射的不动点YF满足方程:

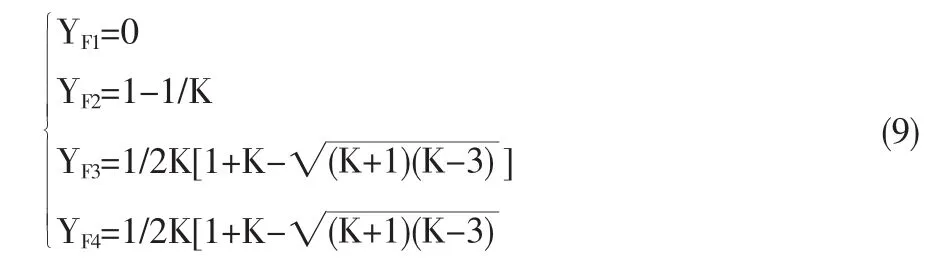
解得:

根据:

则根据稳定性和分岔理论可得:
(1)当0≤K<1,平衡点在区间[0,1]上仅有一个,即有唯一稳定不动点YF1;
(2)当K=1,系统产生跨临界分岔,YF1不稳定,YF2稳定;
(3)1 比如初值=0.9,K=2.4时,方程经过几次迭代后,逐渐趋于稳定解。 (4)当K=3,不动点YF2经倍周期分岔失稳,系统有一对周期2不动点,二次映射时,周期2不动点满足方程: 解公式(7-8)可得4个不动点 同样根据稳定性和分岔理论可得: 比如初值=0.9,K=3.2时,方程表现为周期变化行为,存在周期解。 比如初值=0.5,K=3.8时,方程表现为混沌行为。 当n次影射时,用数学归纳法可以证明: (1)当Km-1 (2)当K=Km,2m-1个稳定周期不动点,发生倍周期分岔,系统有2m个2n周期不动点。 综上所述,当0≤K≤1时,有一个稳定的不动点YF=0;当1 综上所述,协调发展度若用此函数仿真,可能落在稳定解、周期解和混沌区域,周期解的含义为协调发展度在两点上下波动,不稳定,而混沌状态则表现为协调发展度呈不规则运动状态。 根据各年的协调发展度,用最小二乘法对方程βTt+γ(a≠0)进行回归拟合,估计参数α、β、γ的数值。然后根据参数α、β、γ的取值计算出参数K值,按照参数K的取值判断预测模型的动态行为。 当系统满足稳定条件时,对区域科技与经济系统协调发展度的模拟预测是比较简单的,按照方程进行迭代即可求出未来几年的区域科技与经济系统协调发展度数值,同时可对方程模拟分析,模拟未来相当长一段时间内区域科技与经济系统协调发展度动态变化过程,掌握区域科技与经济系统协调发展度的变动规律,据此可对未来的协调发展度进行控制。 当系统存在周期解和处于混沌区域内时,长期预测是困难的。当系统处于混沌区域时,第一,初值条件不同,会使预测结果随时间推移而相差很大;第二,参数稍微变动,引起的结果也很不相同。但这并不等于说是不可测的,事实上在短期内,系统结构保持不变的情况下,初始值变化引起的未来状态变化在短期内还是相近的,短期预测还是可行的[6],可以利用观测资料进行短期预测。短期预测期限由Lyapunov指数,初始状态误差随时间变化的函数s(t)决定。 我们的目标是稳定与稳定发展,方程的长期动态行为应该是稳定的。区域科技与经济系统的协调发展度的优化控制的手段就是通过调节参数α、β、γ,使区域科技与经济系统协调发展度处于稳定的发展状态,并且实现系统的协调发展度最优的目的。 因此对于区域科技与经济系统协调发展度的优化控制,当协调发展度预测方程的运行轨迹是稳定发展的,我们的控制目标就是使方程的稳定解增加,即通过调整α、β、γ的取值使,使K→3系统的协调发展度达到我们的预期目标。如果方程的运行轨迹是混沌的,则处于混沌状态的协调发展度极其不稳定且不规则,不是我们所期望的协调发展度运动状态,对其实行优化,也就是通过对参数α、β、γ在一定的取值范围内进行优化,使K值减小,落在[1,3]的范围,并且使K→3,使系统处于非混沌区并且使协调发展度增加。对于存在周期解的情况与此类似。 对于区域科技与经济系统协调发展度的优化控制,应从影响区域科技与经济系统协调发展度的因素着手,针对目前存在的主要问题,通过增加科技投入等对策,改变参数值,试图用较小成本的代价实现较大的区域科技与经济系统协调发展度的动态行为的改善。具体可以采用如下方法: (1)进行单参数控制。由于协调发展度预测模型中有3个参数,故可以在较短的连续间隔内分开控制每个参数。在每个间隔中只控制任一参数,其他两个参数保持不变,这样不仅可以明确各个参数的控制权重,还可以避免由于多种控制措施同时实施而可能导致的功能相互牵制乃至相互抵消的结果。 (2)微扰的控制措施,对区域科技与经济系统协调发展度的控制应该采取微扰的措施。政府的调控力度要选择适当的控制时机,不宜经常使用;但在必要时可以进行大幅度改革,以产生较好的效果。 (3)逐步渐进的控制方法。当所希望达到的控制目标行为与现有行为存在较大差异时,不宜一蹴而就,可以采用逐步逼近的方法,并轮换调节各个控制参数,以最大限度的减小控制中可能出现的误差。当存在多重目标行为时,更加要慎重考虑控制行为对已经达到的行为可能产生的影响。 对于区域科技与经济系统协调发展度的调节与控制是一个逐步渐进的过程,是一个与区域科技与经济系统协调发展现状评价、预测紧密相连的过程,是一项复杂的系统工程。对于区域科技与经济系统协调发展度的调节与控制主要通过相应的调控对策来执行,各区域应当根据自身的状况,建立一套行之有效的调控对策体系。 [1]刘洪.经济混沌管理理论方法应用[M].北京:中国发展出版社,2001. [2]苏文利.国内生产总值的非线性混沌预测[J].数量经济技术经济研究,2003,(7). [3]葛新权.两个非线性混沌动力学模型[J].数量经济技术经济研究,1998,15(8). [4]吕金虎,陆君安,陈士华.混沌时间序列分析及其应用[M].武汉:武汉大学出版社,2002,(1). [5]Diemont S A,Martin J F.Lacandon Maya Ecosystem Management:SustainableDesignforSubsistenceandEnvironmental Restoration.Ecological Applications:A Publication of The Ecological Society of America,2009,19(1). [6]向昌盛,周子英.混沌时间序列的支持向量机预测[J].统计与决策,2010,(1). (责任编辑/易永生) F204 A 1002-6487(2011)06-0060-03 黑龙江省博士后资助经费资助项目;东北林业大学哲学社会科学研究基金项目(09066) 姜钰(1978-),女,黑龙江人,博士后,副教授,研究方向:现代管理理论与方法,应用统计学。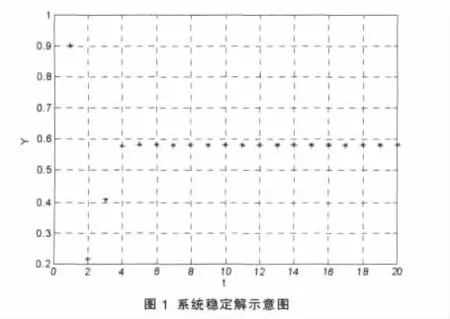

3 基于动态演化过程的区域科技与经济系统协调发展度模拟预测
4 区域科技与经济系统协调发展度的优化控制
猜你喜欢
东北师大学报(自然科学版)(2022年4期)2023-01-16黄河之声(2022年10期)2022-09-27中学生数理化·七年级数学人教版(2022年5期)2022-06-05中学生数理化(高中版.高二数学)(2022年4期)2022-05-25中学生数理化(高中版.高二数学)(2022年4期)2022-05-25中学生数理化·七年级数学人教版(2021年5期)2021-11-22数学物理学报(2020年4期)2020-09-07新世纪智能(数学备考)(2020年12期)2020-03-29中等数学(2019年12期)2019-05-21中学生数理化·八年级物理人教版(2017年11期)2017-04-18