
电动车增程器控制单元的硬件在环仿真系统设计
2012-06-01 14:55周明珂袁昌明
中国计量大学学报 2012年2期
周明珂,袁昌明
(中国计量学院 质量与安全工程学院,浙江 杭州 310018)
在能源日趋紧张和环境污染日益严重的背景下,纯电动汽车是未来汽车行业的必然发展趋势.但是当前电动汽车的发展却遭遇动力电池的技术瓶颈,低能量密度和高昂的成本导致了设计者在续驶里程和成本之间难以取舍.而增程式电动车(extended range electric vehicle,EREV)作为一种特殊的混合动力汽车,介于传统混合动力车和纯电动汽车之间,既比传统混合动力更省油、结构简单,同时又对电池的要求不高,比纯电动成本更低,开始逐步出现在人们的视野之中.所谓增程式电动车是指在纯电动汽车的基础上追加增程器(range-extender,RE),通过增程器向车辆输入额外的能量使纯电动车车主能够免于经常停车充电的一种电动车[1].增程器作为增程式电动汽车的核心部件,已经成为当前新能源汽车的研究热点.
本文通过对增程器工作原理的分析,采用xPC Target仿真工具,研究开发了增程器控制单元硬件在环仿真(hardware in the loop system,HILS)系统,以满足控制单元设计与开发需求,完成控制单元的功能测试和控制策略优化等工作.
1 增程器的工作原理及HILS系统方案
目前一般认为增程器是一个小型的电机组,由发动机、发电机、变频器和控制系统组成.增程式电动汽车动力系统结构如图1.

图1 增程式电动汽车的动力系统结构图Figure 1 EREV's powertrain structure chart
增程器的存在与否不影响整车的动力电池以及驱动系统的设计性能.其存在只是为了进一步提升纯电动汽车的续航里程,尽量避免电动车频繁地停车充电.
汽车行驶过程中,增程器的控制单元首先检测驾驶员当前选择的是自动起停模式或手动起停模式.在自动模式下,控制系统根据检测到的整车状态、工况及电池电量,自行启动和停机;在手动模式下,则由驾驶员根据需要进行手动启动和停止.增程器在工作的时候,其控制系统要根据整车控制器(VMS)的指令进入相应的发电模式:恒压模式、恒流模式和故障模式.同时,控制器通过监测当前的动力电池状态和当前的发电机组的工作模式,向电机控制器(MCU)发出功率控制指令.增程器ECU的控制简图见图2.
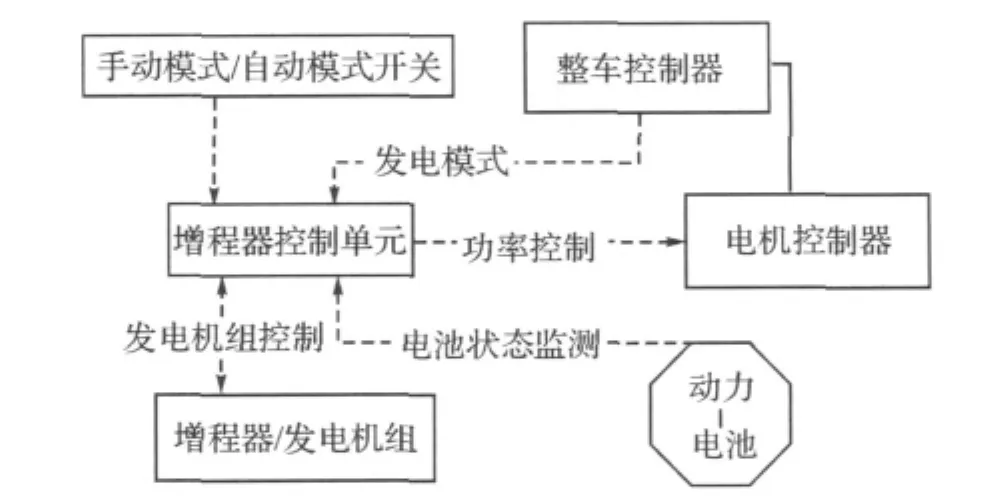
图2 增程器ECU的控制简图Figure 2 Simplified control chart of the ECU of RE
所谓硬件在环仿真系统是指将实际被控制对象(发动机、发电和动力电池等)用高速计算机上实时运行的仿真模型来替代,与控制单元实物通过信号接口系统连接成一个系统[2].部分传感器和执行器采用实物.
本文设计开发的增程器ECU硬件在环仿真系统基于MATLAB/xPC Target的“双机仿真”模式进行设计,系统框图如3.利用xPC Target工具将两台PC分别配置成主机跟目标机,主机和目标机之间采用TCP/IP协议通信,xPC目标机作为实时PC运行被控对象的仿真模型,为控制单元的设计开发提供一个虚拟的实验环境,同时通过数据采集卡、CAN通讯卡与信号接口系统的连接,实现了控制单元硬件实物的物理信息与被控对象仿真模型的数字信息交换.信号接口系统(含信号测量板)对信号进行电气特性的匹配等处理;模拟负载装置提供了控制器仿真过程中的一些负载模拟和实际器件如节气门阀体、点火线圈等;监控系统通过TCP/IP协议与xPC目标机中的实时模型进行交互,获得仿真过程中全部信息,将操作者的控制指令传递给系统内部.
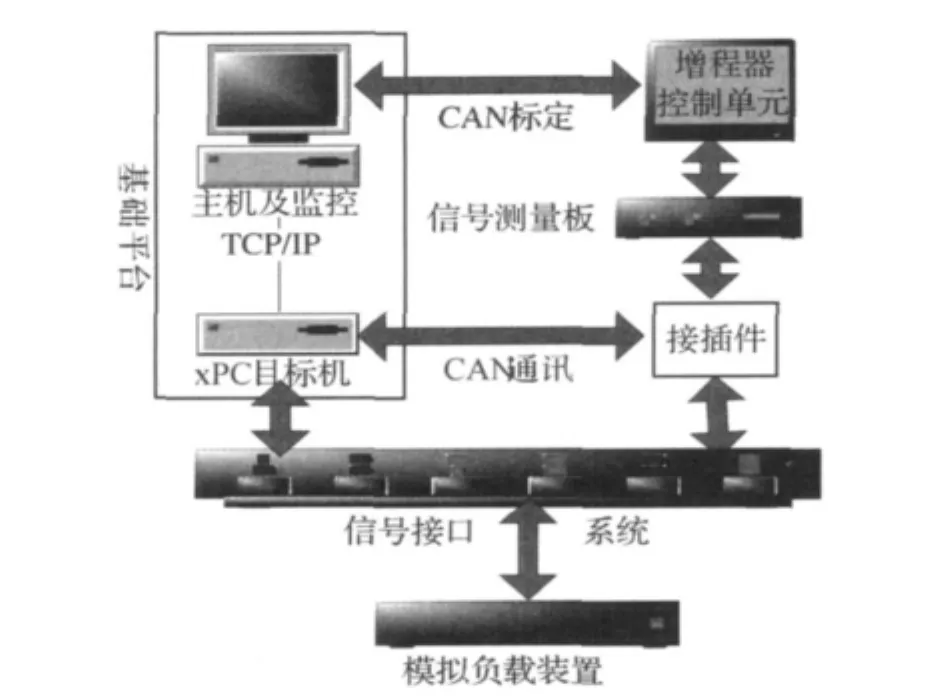
图3 增程器ECU硬件在环仿真系统框图Figure 3 Hardware in the loop system chart of the ECU of RE
2 HILS系统的硬件设计
2.1 HILS基础平台的硬件设计
HILS基础平台需要完成实时仿真模型产生的虚拟信号到真实信号的转换,这些信号包含数字量的I/O信号,模拟量的D/A信号和CAN通讯信号.比如增程器的启动开关信号属于数字信号,水温信号属于模拟信号,而控制器控制命令通过CAN总线进行传送.
HILS基础平台包括xPC主机、目标机和相关PCI数据采集卡等.其中主机采用普通的笔记本电脑,目标机采用凌华公司生产的工控机(CPU 为core 2Duo E7400,2.8GHz).基础平台仿真的虚拟数字/模拟信号通过PCI数据采集卡实现与真实世界的交换.xPC Target工具箱提供丰富的第三方PCI数据采集卡的设备驱动程序,可以直接用于仿真.本系统中采用凌华公司的PCI-6216(DA,DIO)、PCI-7200(DIO)和 PCI-7841(CAN)并不具有xPC Target环境下的设备驱动,因此需要采用MATLAB/Simulink环境下的S函数进行编写和集成[3-4].整个 HILS系统具备36路数字信号输入/输出、16路模拟量输出;同时支持CAN2.0A/B通讯协议.
2.2 信号接口系统硬件设计
信号接口系统的硬件设计工作有两个方面:根据控制单元的接口定义,对基础平台的板卡端口资源进行规划配置,明确输入输出信号的类型及电气特性,部分信号类型及板卡端口配置见表1;通用型的HILS系统的输入输出信号接口板和调理电路的设计,使HILS系统能够满足实际控制单元的电气特性要求.

表1 部分信号类型及板卡端口配置Table 1 Part of the signals'type and port configuration of the card
接口系统的设计要求是灵活、可靠,便于系统扩展,同时要方便系统调试.在设计过程中,将整个信号接口系统分成6个模块:信号转接模块、ECU模拟量输入调理模块、ECU开关量输入调理模块、转速信号调理板(具备霍尔和磁电两种类型的曲轴传感器信号)、ECU输出信号调理模块和电源供电调理模块.电源供电调理模块为各模块提供电源供给,其他模块则完成相应信号的调理、匹配功能.用户可以根据需求随时增加或者卸除各模块和板卡,以满足不同的仿真测试需求.
2.3 模拟负载装置硬件设计
由于控制单元实物实际的工作中的负载多是低边驱动的开关负载和电机类负载,比如节气门电机等.模拟负载根据负载特性共有3种形式:电阻+电感、电阻和继电器.
模拟负载设计仅考虑对控制单元的功能进行测试,每个负载输出均采用LED显示作为反馈.对一些典型负载如点火线圈、电子节气门等,会在模拟负载的电路设计时,添加负载选择开关及真实负载的接口,以方便进行控制器的性能测试.
3 HILS系统的软件设计
HILS系统的软件部分主要包括增程器的实时仿真模型和监控系统软件.
3.1 增程器系统的实时模型
应用 MATLAB/Simulink建立增程器的实时仿真模型.根据增程器的组成结构,增程器仿真模型分为:发动机模型、发电机+变频器模型和动力电池等子模型.建立的增程器模型如图4所示.本文主要采用实验建模为主,理论建模为辅助的混合建模方法.
在增程器的工作过程,发动机控制的目的是尽可能地让其工作于高效区,因此只需关心发动机模型的输入和输出,对其内部过程可以尽可能的简化.对于汽油机来讲,外部控制变量主要是节气门开度,因此发动机的建模的主要工作是是建立节气门开度、转速与发动机输出扭矩特性关系的模型,以及发动机燃油消耗模型.以SQR372发动机为研究对象,由试验数据拟合得到曲线方程为公式(1)和动力学方程分别公式(2)、(3):


式中,T0为稳态转矩;T1是修正输出转矩;T1(t)是发动机负载转矩,j是发动机的转动惯量;w为发动机输出轴的角速度;θ为节气门开度;n为发动机转速.
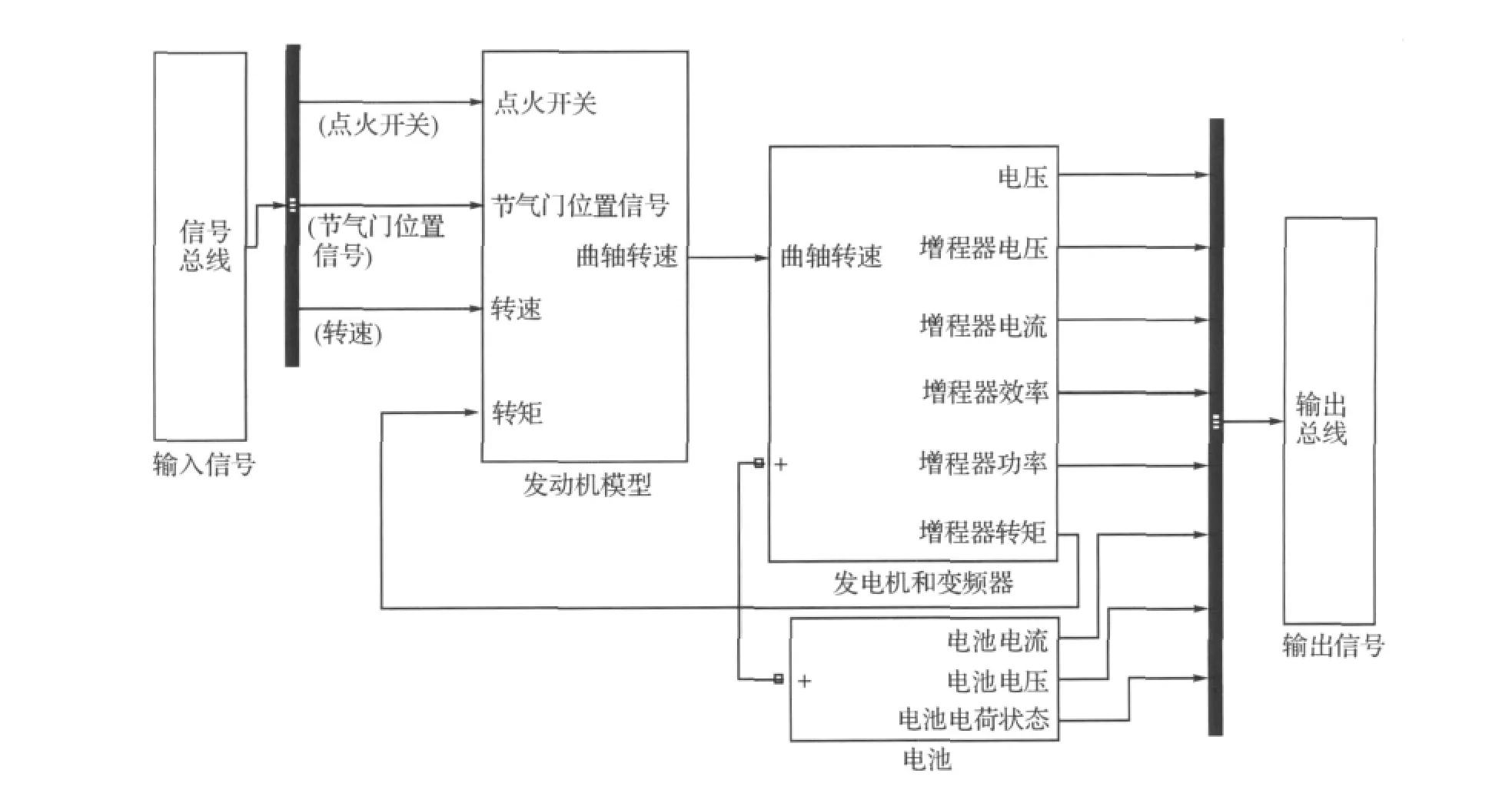
图4 增程器系统实时仿真模型Figure 4 Real-time simulation model of RE
另外,发动机在冷启动时油耗要高于发动机热机工作时的油耗,为此引入温度修正,采用文献[5]提供的经验公式:

式中,cold表示发动机冷机油耗;hot表示发动机热机的油耗,这都可以通过发动机性能台架试验测定.t是发动机冷水温度,c和e都是常量系数.
发电机模型采用永磁同步交流电机,与发动机模型一样,根据性能试验得到拟合公式及发电机动力学方程,建立发电机模型.

式中,U为发电机电压;I为发电机电流;j为旋转系统的转动惯量;Te为电磁转矩;Tl为发动机转矩.
动力电池模型采用了文献[6]的内阻模型,电池的内阻模型分为两部分:电气模型和热模型,电器模型由电压源和电阻组成.电池内阻R是SOC、温度和电流方向(充电或者放电)的函数,按下时求得:

电池开路电压U 是SOC和温度的函数,按下式求得:

电池的充放电内阻和SOC、温度的关系以及电池开路电压和SOC、温度的关系都是根据试验数据建立的查表关系.
电池SOC计算公式:

其中SOCinit是初始SOC;Cn是电池额定容量.电池的热模型用于模拟电池的温升,计算电池的温度T.温度平衡方程

3.2 监控系统软件设计
监控软件基于xPC Target API for.NET Framework用C#语言自行开发,该监控软件与目标机的xPC实时内核进行通讯和对实时程序的监控[7].为增程器ECU硬件在环仿真试验提供友好的人际交互界面,使研究人员能对仿真测试过程进行实时的监控与干预.同时监控系统还具有实时显示、在线调整参数和数据记录等功能.其主监控界面如图5.
图5 HILS系统主监控界面Figure 5 HILS system monitoring software
4 HILS系统的试验运行
开发完成后的增程器ECU硬件在环仿真系统除了可以进行复杂的硬件接口电路测试,最重要的是对增程器ECU的控制策略和能量管理算法的验证和测试;还能进行增程器ECU的故障模拟与研究.
图6为动力电池SOC变化的情况,SOC的仿真初值为0.7,在系统运行过程中,当SOC处于0.4~0.7区间时,采用功率跟随的控制策略.由图7可知,同时当SOC低于0.6时,发动机启动,满足整车运行功率需求的同时,为动力电池充电.显然动力电池以及发动机的运行状态与期望一致,满足增程器的性能控制要求.
增程器ECU硬件在环仿真系统的应用说明该系统的研发是成功的.

图6 动力电池SOC变化曲线Figure 6 SOC variation curve of the battery

图7 发动机输出功率Figure 7 Output power of the engine
5 结 语
利用MATLAB/xPC Target的“双机模式”从基础平台、信号接口系统、模拟负载设计和监控软件等方面成功的设计和开发了增程器控制单元的硬件在环仿真系统,并搭建了增程器的实时仿真模型.为增程器控制单元的设计开发提供了便利条件,同时也为系统功能的全面测试工作提供了高效平台,为控制系统的参数匹配和控制策略优化提供良好的实验平台.这缩短了ECU的开发周期,降低了研发成本.
[1]吴韶建,陶元芳.增程式电动汽车的概念和设计方案[J].机械工程与自动化,2010,162(5):209-213.
[2]张 欣,宋建锋,李国岫.HEV动力总成硬件在环仿真系统的研究与开发[J].高技术通讯,2003,13(8):77-81.
[3]THE MATHWORK INC.xPC Target User's Guide [EB/OL].[2010-12-06](2011-12-20).http://www.math works.com/acces/helpdeskhelp/pdf_doc/xpc/xpc_target_ug.pdf.
[4]杨 涤,李立涛,杨 旭,等.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2002:100-121.
[5]JOHNSON V H,WIPKE K B,RAUSEN D J.HEV control strategy for real-time optimization of fuel economy and emissions[C]//Society of Automotive Engineers Transaction.Pennsy lvaina:Society of Automotive Engineers,2000:1677-1681.
[6]JOHNSON V H.Battery performance models in ADVISOR.[J].Journal of Power Sources,2002,110(2):321-329
[7]THE MATHWORK INC.xPC TargetTM4.0API Guide[EB/ OL].[2010-12-06](2011-12-20).http://www.math works.com/access/helpdeskhelp/pdf_doc/xpc/xpc_target_ug.pdf.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
汽车实用技术(2020年2期)2020-02-25
民用飞机设计与研究(2019年2期)2019-08-05
消费导刊(2018年10期)2018-08-20
汽车与新动力(2018年2期)2018-05-09
能源(2017年12期)2018-01-31
汽车文摘(2017年5期)2017-12-05
汽车文摘(2017年10期)2017-12-02
资源再生(2017年4期)2017-06-15
汽车与新动力(2015年1期)2015-02-27
