凸轮评定公差标准及评定方法
2012-07-17 01:23广州威而信精密仪器有限公司西安分公司
上海计量测试 2012年5期
/ 广州威而信精密仪器有限公司西安分公司
0 引言
要做到高准确度、高效率地测量发动机凸轮的各项参数,并对各项测量参数进行正确处理、评定,及时快速地反馈凸轮的质量信息,传统的光学机械量仪以及人工数据处理的方法,已不能适应凸轮广泛采用自动线高效生产的需要了。随着汽车工业的高速发展和制造技术的不断提高,对凸轮准确度的测量也必须相应地配套高效率的凸轮综合自动测量仪,并配以快速的数据处理、评定软件及打印输出功能。这里应特别强调的是,评定公差的标准应与凸轮的功能要求相适应。
1 凸轮升程曲线函数式的构建
凸轮机构从动件的运动规律,是通过凸轮正确形状的旋转运动取得的。因此,凸轮机构设计过程中,必须根据从动件(挺柱)的运动要求,正确设计凸轮的升程曲线。如图1所示,理论上要求凸轮升程曲线应以连续函数的形式给出,即

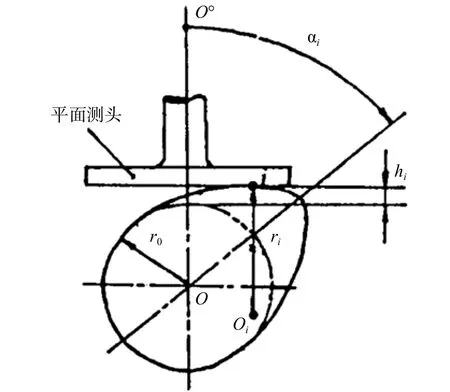
图1 凸轮升程函数式的建立
式中:h— 凸轮被测点的升程;
α— 凸轮被测点的转角;
r— 凸轮被测点的曲率半径。
在凸轮机构工作过程中,理论上要求凸轮不出现“刚性冲击”和“柔性冲击”[1],这就必须保证凸轮升程曲线二阶连续可导。但实际应用中,凸轮的升程曲线一般不用连续函数来描述,而是把凸轮的理论升程曲线用“升程表”的形式给出。升程表给出的是一组离散数据,数据的多少依据凸轮的工作要求确定(一般是1°间隔给出一个理论升程值)。凸轮从动件的运动准确度,即凸轮升程曲线的准确度,由凸轮的升程公差来控制。
2 凸轮评定采用的公差标准
目前,参照GB/T 1182-2008《产品几何技术规范(GPS) 几何公差形状、位置和跳动公差标注》凸轮有(可采用)以下公差标注方法:
1)按尺寸公差要求标注;
2)按几何公差要求标注:
(1)采用线(面)轮廓度公差标注,
(2)采用径向圆跳动公差标注。
3 对凸轮采用尺寸公差评定的认识
凸轮用尺寸公差评定,测量的是凸轮的升程变化量,尽管控制方向符合凸轮测量实际,评定简单、方便、直观,但依据GB/T4249-2009《产品几何技术规范(GPS)公差原则》,尺寸公差并不控制凸轮的形状误差,所以,在建立了几何公差国家标准之后,凸轮应采用几何公差评定。
凸轮测量属于形位误差的测量范畴,如果用尺寸公差控制,因为尺寸公差带的位置是固定的,不随凸轮实际形状浮动(图2),按照国家标准GB/T16671-2009《(GPS)-几何公差 最大实体要求最小实体要求和可逆要求》的要求,在建立了几何公差国家标准之后,仍用尺寸公差评定凸轮升程误差的方法是欠妥当的,它往往可能引起误判。
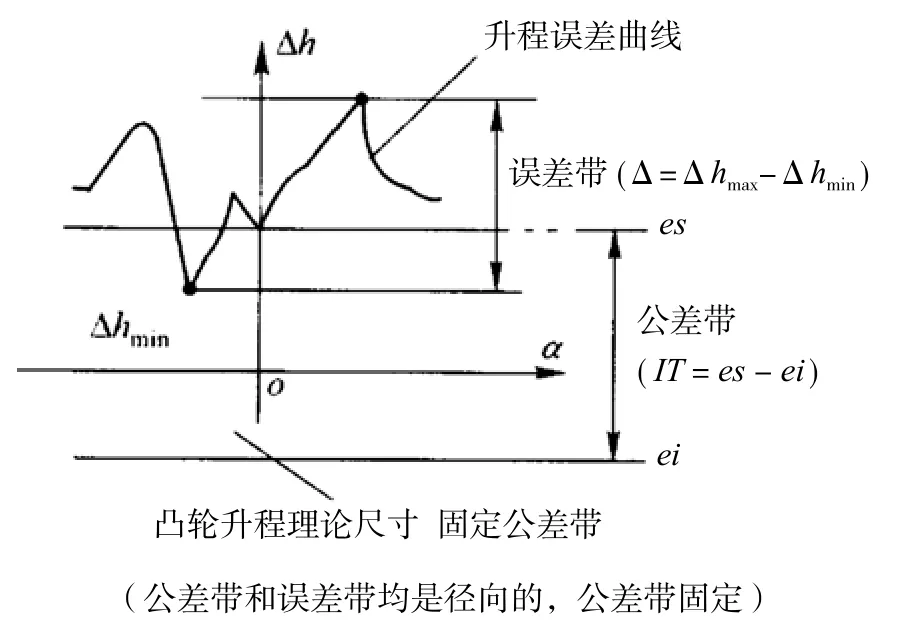
图2 采用尺寸公差评定凸轮的公差带与误差带
4 对凸轮采用轮廓度公差评定的看法
线(面)轮廓度公差带是包络一系列直径为公差值的圆的两包络线之间的区域,诸圆的圆心应位于凸轮的理想轮廓上。对凸轮而论,其理想轮廓是指以凸轮升程理论正确尺寸所描述的轮廓。
线(面)轮廓度公差带所控制的区域,是凸轮的法向变化量,而凸轮的误差(测量)值是径向变化量(图3)。用线(面)轮廓度公差控制凸轮的误差,尽管公差带的位置可随凸轮的实际形状浮动,但评定时,必须将凸轮误差(测量)的径向值转化为法向值,才能和公差值进行比较,测量和评定效率不高。所以,采用线(面)轮廓度公差评定凸轮的方法是有待商榷的。

图3 采用线轮廓度公差评定凸轮的概念
5 推荐凸轮采用径向圆跳动公差评定
径向圆跳动公差带是在垂直于基准轴线上任意测量平面内半径为公差值、且圆心在基准轴线上的两个同心圆之间的区域。对凸轮而言,正好符合凸轮测量的实际方法。
测量时,以凸轮的基圆中心轴线为基准轴线,可以这样来理解凸轮升程的测量值:凸轮轮廓上每一个升程测量点的运动轨迹,都是凸轮基圆的同心圆,当实际被测点偏离同心圆时,这个偏离值就是凸轮被测点的径向圆跳动误差——被测点的升程偏差(图4)。凸轮轮廓上所有升程测量点中,径向跳动量的最大值与最小值之差,就是凸轮升程的最大变动量,即被测凸轮的升程误差。
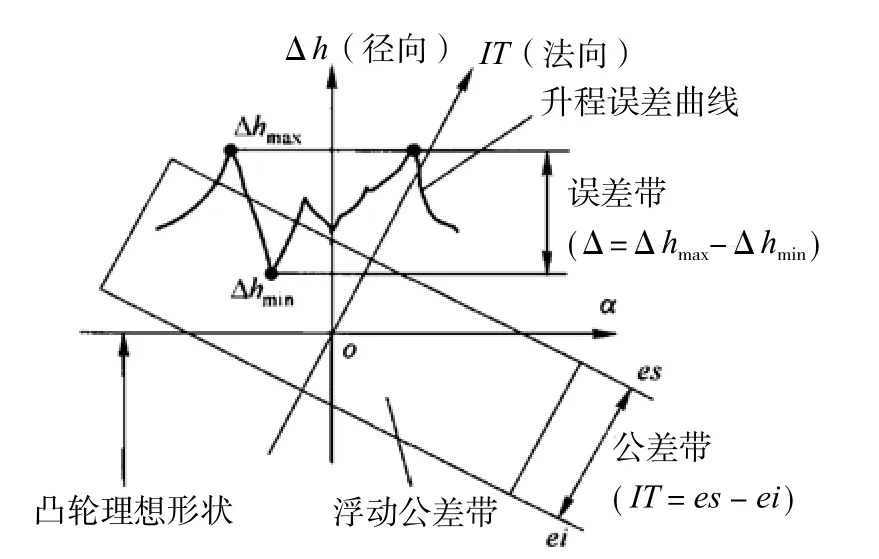
图4 采用线轮廓度公差评定凸轮的公差带
根据标准,径向圆跳动公差可以控制全部要素或部分要素,则可按凸轮的功能要求,对凸轮的基圆段、升程段、降程段、过度段、缓冲段……分别给予不同的公差要求。
用径向圆跳动公差控制凸轮的升程误差,可以弥补尺寸公差和线(面)轮廓度公差控制方法的不足:径向圆跳动动公差控制的是凸轮的径向变化值,凸轮测量的也是径向变化值,两者一致,且公差带的位置随凸轮的实际形状浮动(图5)。当凸轮实际偏差具有确定值时,公差带也具有确定的位置,即公差带的位置由凸轮的实际偏差确定(图6)。
用径向圆跳动公差评定凸轮时,测量值和公差都是径向值,便于比较、测量,评定简便、直观。
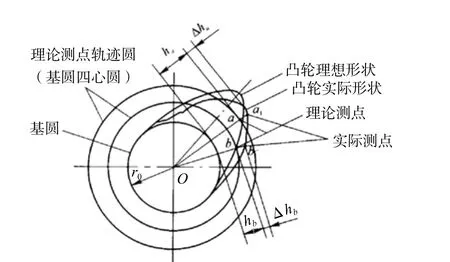
图5 对径向圆跳动应用于凸轮评定
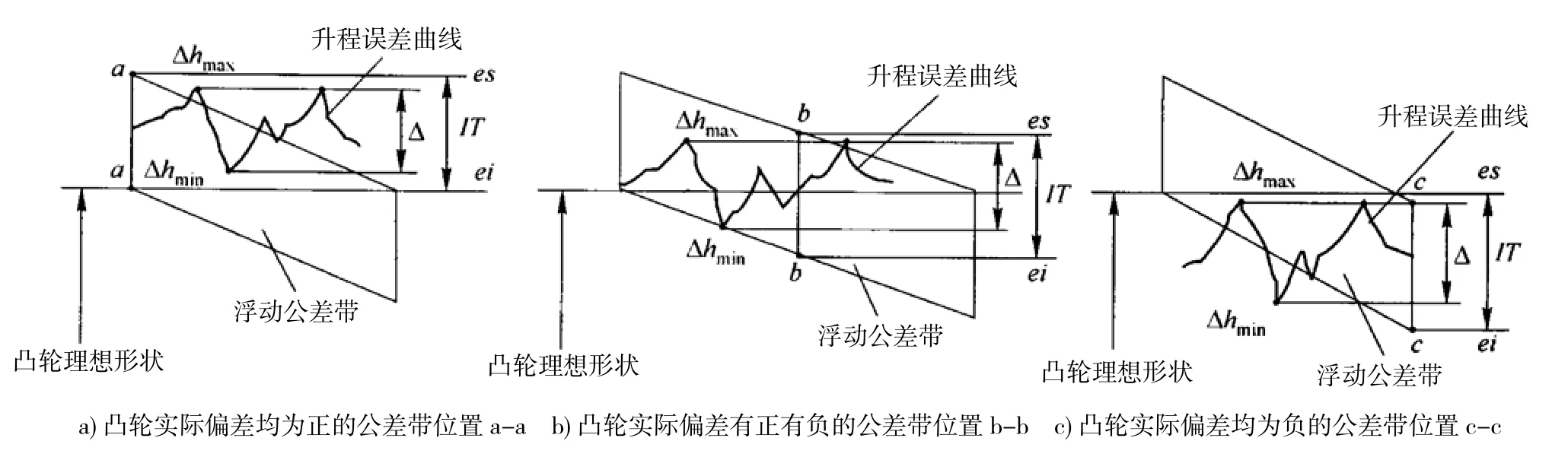
图6 采用径向圆跳动公差评定凸轮的公差带与误差带(公差带和误差带均是径向的,公差带浮动)
6 凸轮的升程误差与形状误差
凸轮的升程误差和形状误差既有联系又有区别[2-5]。虽然采用的是同一测量数据,但它们的处理方法不同。凸轮升程误差与凸轮形状误差是两个不同的概念。如图7所示,凸轮升程误差属于尺寸公差的范畴,其公差带的位置由凸轮升程的理论尺寸确定,且公差带的位置是固定的。凸轮升程公差控制要素为凸轮机构从动件的实际位移相对于理论位移的变动量(实际凸轮轮廓尺寸误差);凸轮形状误差属于几何公差范畴,公差带的方向随凸轮实际形状而定,公差带的位置是浮动的,几何公差控制要素为实际凸轮的形状误差。形状误差的大小应按“最小条件”要求来确定。
凸轮机构从动件的运动规律是通过凸轮的形状来反映的,因此需要根据从动件的运动要求设计凸轮的形状。一般来说,每个凸轮的形状都是由基圆和许多二次曲线、三次曲线及圆弧等组成,其构成的封闭曲线称为升程曲线。由于凸轮升程曲线的特殊性,实际应用中提供给加工和测量的升程曲线是0~360°的离散数据,这就是描述每个凸轮形状的理论升程表,其升程曲线的准确度由升程公差进行控制。

图7 凸轮的升程误差与形状误差
7 凸轮升程的测量、数据处理、误差评定
凸轮的升程误差是指:实际凸轮对应理论角度上的实际升程与理论升程的代数差。即

根据升程误差的定义,凸轮升程测量时,测量的应是凸轮理论转角对应测点的实际升程。这一点在实际测量中是不容易做到的,测量数据中一般含有转角误差(系统性误差),必须剔除测量数据中的转角误差的影响,才可能得出正确的测量结果。这就提出了如何进行凸轮测量和数据处理方法的问题[6]。
如图8所示,凸轮升程表上给出的是理论转角α对应的理论升程h,按定义要求,本应测量出理论转角α对应测点的实际升程hs(图8a)。可是,由于凸轮测量起点转角有误差Δα,实际上测量出的不是理论转角α对应点上的实际升程hs,而是转角α+Δα对应点上的实际升程hΔα(图 8b)。所以,一般按公式

求解的升程误差与定义是不相符合的。

图8 凸轮的设计要求与测量现状
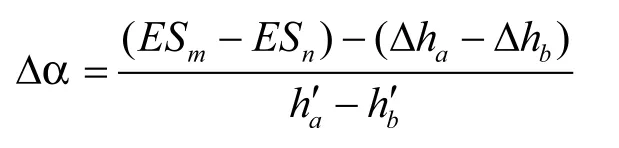
符合定义的升程误差,应按下式求解:

式中:h′ = dh/dα— 凸轮升程变化率;
Δα— 应根据凸轮的公差要求分别求解。
凸轮测量(处理)方法应是:①获得原始(迭代)数据,要求测量数据尽量准确;②对原始数据进行处理,只有准确的原始数据,才能保证数据处理的可靠性;③根据处理结果确定(计算出)各凸轮测量起始点位移量(起始转角的角度误差)Δα(用它来进行优化处理,亦用来修正凸轮的相位角)。
如果凸轮升程符合公差要求,则直接将升程判为合格;如果升程出现某些超差点,这时应将升程误差和升程公差要求统筹考虑,进行数据处理,再给出凸轮升程合格与否的结论[6]。
为此,建立目标函数
进行优化处理,直至目标函数F为最小。
具体方法:从升程的迭代数据中,找出升程误差曲线上的凸轮升、降程段(左、右侧)升程误差最大点a和最小点c、d,根据“等距准则”可得等距方程式

解上列方程式,可得

数据处理后的升程误差为

升程误差曲线的最小包容区域的宽度为

一般应根据凸轮升程的公差要求,给出相应的处理方法。数据处理过程,就是将测量数据处理成符合定义的升程误差值——符合设计要求的升程误差值的过程。
当凸轮的升程公差按尺寸公差标注时,公差带的位置是固定的。只要求测量数据能保证凸轮升程最大限度的合格,不考虑误差带包容区域的最大宽度为最小,即不考虑“最小条件”要求。
当凸轮的升程公差按几何公差标注时,公差带的位置是浮动的。必须根据实际凸轮误差数据,首先确定公差带的位置,并应保证误差带的形状和公差带的形状相一致,误差包容区域的最大宽度为最小。即凸轮的升程误差应符合“最小条件”要求[7]。
凸轮升程误差曲线符合“最小条件”要求的评定准则:
1)凸轮左右侧高点等值准则——准则一(图9)
(1)凸轮左右侧误差最高点相等(定浮动公差带上限的位置),即

由上列方程式解出
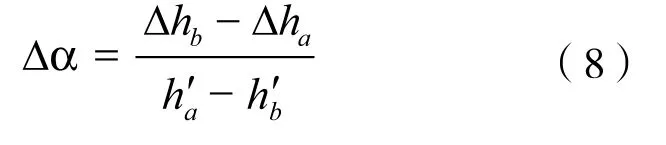

图9 高点等值准则
(2)凸轮误差最低点(取左右侧误差最低点中的较低者) 的升程变化率的绝对值在左、右侧误差最高点的升程变化率的绝对值之间,即

2)凸轮左右侧低点等值准则——准则二(图10)
(1)凸轮左右侧误差最低点相等(定浮动公差带下限的位置),即

由上列方程式解出

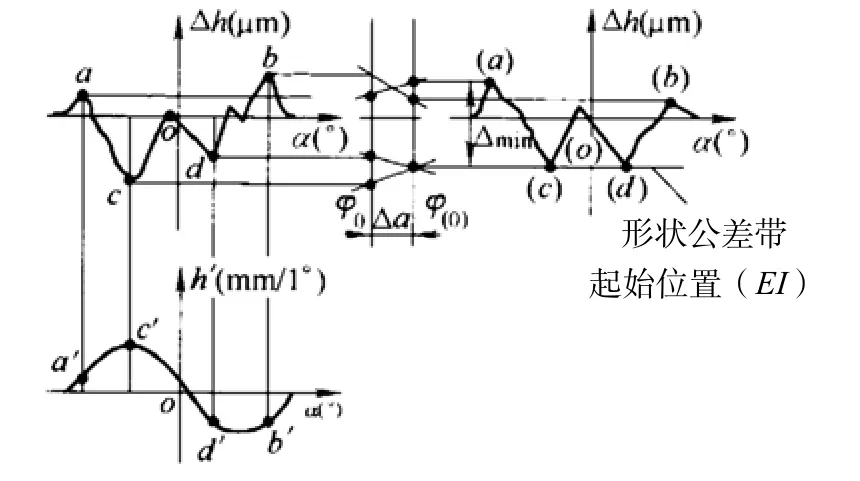
图10 低点等值准则
(2)凸轮误差最高点(取左右侧误差最高点中的较高者)的升程变化率的绝对值在左、右侧误差最低点的升程变率的绝对值之间,即

3)凸轮公差小的一侧高点零距准则——准则三(图11)
(1)凸轮公差小的一侧左侧(或右侧)误差最高点a(或b)落在公差带ESm(或ESn)上,即

由上列方程式解出

(2)凸轮误差最低点(取左右侧误差最低点中的较低者) 的升程变化率的绝对值在左、右侧误差最高点的升程变化率的绝对值之间,即

图11 高点零距准则
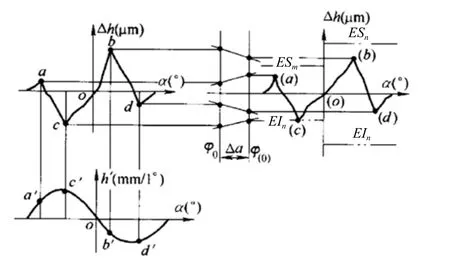
图12 低点零距准则

4)凸轮公差小的一侧低点零距准则——准则四(图12)
(1)凸轮公差小的一侧左侧(或右侧)误差最低点c(或d)落在公差带EIm(或EIn)上,即

由上列方程式解出

(2)凸轮误差最高点(取左右侧误差最高点中的较高者)的升程变化率的绝对值在左、右侧误差最低点的升程变率的绝对值之间,即

用“反证法”证明了以上各“准则”的正确性。
当升程公差按几何公差标注时,只给出了公差值的大小,应根据准则一、准则二来确定凸轮升程公差带的位置和浮动方向,并保证了误差带的形状和公差带的形状相一致,误差包容区域的最大宽度为最小;当升程公差按尺寸公差标注时,公差值的大小和公差带的位置是确定的,应根据准则一、二(用于左、右侧公差相等),准则三、四(用于左、右侧公差不相等)来确定凸轮误差点相对于公差带的位置,并做到了最大限度地保证凸轮升程合格。
具体计算(求解)方法如下:
(1)与凸轮公差要求相适应的凸轮实际测量位置的起始转角为

式中: — 按“敏感点法”求解;
—凸轮起点转角误差,根据要求分别由式(8)~(11)解出。
(2)按“最小条件”评定的凸轮升程误差值,按下式求解

式中:Δhi、Δh(i)— 坐标旋转前、后的升程误差值。
最后应指出,凸轮升程公差按几何公差标注时,凸轮左、右侧等值误差最高(最低)点构成升程误差曲线的上(下)包容直线,误差最低(最高)点构成下(上)包容直线,上下包容直线间的距离,就是凸轮升程误差曲线的包容区域的宽度Δ,即按“最小条件”评定的凸轮升程误差值:

这时,凸轮升程误差曲线上被测点的误差值Δh(i)符合“最小条件”要求。
凸轮的升程公差,一般常见两种标注方法[2]:①尺寸公差标注方法——标注的是一个没有(不冠)符号(数学性质)的绝对值。无论公称尺寸是多大,它的上下两个极限偏差均为正、均为负、一正一负、一正一零、或一零一负,其公差是允许尺寸的变动量(绝对值)。公差带的位置由凸轮升程的理论正确尺寸确定,且公差带位置是固定的,升程公差控制的仅是实际凸轮的轮廓尺寸。这时,凸轮的升程误差应按尺寸公差来处理:凸轮的升程公差要求,设定了两个极限尺寸——最大实体尺寸(MMS)和最小实体尺寸(LMS)来限制升程的实际尺寸,要求凸轮升程的任一局部尺寸不得超出两个极限尺寸;②几何公差标注方法——标注的是不提取(实际)被测要素对其理想要素的允许变动。其公差带是提取(实际)被测要素对其理想要素允许变动的区域。方向随凸轮的实际形状而定(变动),公差带的位置是浮动的,升程公差控制要素是实际凸轮的轮廓形状。这时,凸轮的升程误差应按几何公差来处理(升程误差的测量数据,应按“最小条件”要求进行评定):凸轮的升程公差要求,设定了两个平行(或等距)的界线或界面,构成几何公差带来限制实际被测要素。
凸轮测量数据按尺寸公差要求处理,把升程误差与升程公差联系了起来,最大限度地保证了凸轮升程的合格(图13);凸轮测量数据按几何公差要求处理,把升程误差与“最小条件”联系了起来,保证了凸轮升程误差(包容区域的宽度)的最大值为最小(图14)。处理时可根据设计要求,选择相应的处理方法。
图13 凸轮测量数据按尺寸公差要求

图14 凸轮测量数据按几何公差要求
在高效率的凸轮综合自动测量仪上,进行凸轮升程测量时,凸轮每转过18″软件就给出一个升程测量值,经数据处理后,软件按每1°输出测量结果(升程误差值、升程误差曲线)。
8 结语
对于凸轮来说,应该分别标注尺寸(升程)公差和几何公差。因为可以将同一测量数据,分别处理成升程(尺寸)误差和形状误差,这样标注更切合凸轮实际。
避免了用升程(尺寸)公差控制凸轮形状误差时,如将凸轮升程处理为合格,则包容区域的宽度不为最小;如将包容区域的宽度处理为最小,则凸轮的升程超差,与凸轮升程合格的结论相矛盾。
本文介绍的凸轮测量数据的处理过程,把凸轮的升程误差与升程公差联系了起来,最大限度地保证了凸轮升程的合格;同时,凸轮测量数据的处理过程,也把形状误差与“最小条件”联系了起来,保证了形状误差(包容区域的宽度)的最大值为最小,两者分别评定,各自满足,互不干涉。
最后,推荐采用径向圆跳动公差进行凸轮评定(控制),以弥补尺寸公差和线(面)轮廓度公差控制方法的不足。
[1]管荣法.凸轮与凸轮机构[M].北京:国防工业出版社,1993.
[2]刘巽尔.《GB/T1182-2008》简介(续一)[J].机械工业标准化与质量,2009(6):20-25.
[3]刘巽尔.《GB/T1182-2008》简介(续二)[J].机械工业标准化与质量,2009(7):25-31.
[4]刘巽尔.《GB/T1182-2008》简介(续三)[J].机械工业标准化与质量,2009(8):32-35.
[5]刘巽尔.《GB/T1182-2008》简介(续四)[J].机械工业标准化与质量,2009(9):25-32.
[6]刘兴富,李长星.发动机凸轮轴检测方法综述[J].计量技术,2005(8):27-30.
[7]刘兴富.发动机凸轮升程误差符合“最小条件”的评定准则[J].标准化报道,1997(9):17-22.
猜你喜欢
计量学报(2022年9期)2022-10-20
汽车与新动力(2019年6期)2020-01-03
制造技术与机床(2019年8期)2019-09-03
汽车维护与修理(2019年1期)2019-07-09
车用发动机(2018年2期)2018-05-02
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
综合智慧能源(2017年10期)2017-01-18
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
综合智慧能源(2016年1期)2016-02-03