基于SVM算法的碟形水下机器人姿态预测方法研究*
2012-07-25 05:35叶秀芬刘晓阳
传感器与微系统 2012年4期
王 天,叶秀芬,刘晓阳,王 雷
(哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001)
0 引言
水下机器人具有高自由度、非线性、强耦合等特性[1],因此,对其进行控制极具难度,而要实现良好的控制则需要建立高精度的动态模型。
水下机器人的主要建模方法可以总结为2种,分别是机理建模和模型辨识。机理建模过程复杂[2~3],获得的非线性模型仍不适合直接应用到控制当中,需要通过实验反复对模型进行修正。传统的方法(如最小二乘法[4]、梯度校验法、极大似然法[5]等)都不能很好地解决非线性多输入多输出问题。人工神经网络方法[6]也存在网络结构选择难、泛化能力差,需要大量的样本,并且神经网络结构依赖工程经验。
支持向量机(SVM)是近年来基于统计学习理论的一种新型机器学习方法[7],以结构风险最小化原则来自动学习模型结构。该种算法是一种凸二次优化问题,可以很好地得到全局最优解,具有结构简单、泛化能力强等优点,且能较好地解决小样本、非线性和高维数的问题。现有的SVM主要解决单输入单输出问题,而水下机器人是一个具有多输入多输出、强耦合、欠驱动、时变和不稳定特性的复杂动态系统,水动力学特性呈现强非线性。针对该问题,本文提出一种基于SVM的碟形水下机器人姿态运动的多输入多输出非线性系统辨识模型,并结合离线运行数据辨识出该潜水器在水中姿态变化的控制模型参数,最后通过水池实验数据检验了该辨识器的性能。
1 潜水器系统架构和参数分析
本文针对一种具有碟形水动力外形的新型水下机器人进行研究,该机器人外形完全封闭无外挂舵系、推进器等,具有良好的水动力特性与平层运动能力。该机器人通过4台矢量布置的喷水推进器来控制机器人在操纵面内的运动,并且由2个可移动质量块控制机器人重心与浮心的相对位置以此来达到改变机器人操纵面的目的,从而实现了全方位的运动,碟形水下机器人的结构如图1所示。

图1 机器人结构图Fig 1 Structure diagram of robot
图1为惯性坐标系。O-XbYbZb称为机器人体坐标系,原点O为机器人体质心、几何中心。O-XvYvZv为速度坐标系。质量滑块m1和m2分别在OXb1,OZb2两轴上移动,令机器人质心位置改变。坐标系O-XbYbZb与O-Xb1Yb1Zb1和O-Xb2Yb2Zb2完全平行,且各坐标系Y轴重合。平面XbOYb与Xb1OYb1,Xb2OYb2间距离均为ybm。矢量布置的推进器作用于质心上的合推力T和合力矩MT,α是推力线与OXb轴的夹角。
通过以上分析可以看出:该碟形水下机器人受到4台喷水推进器产生的推力T1,T2,T3,T4,变质心移动模块的移动量,对应的输出为体坐标系与大地坐标系的夹角。考虑机器人工作在较浅的水深,水深对姿态控制的影响也不作考虑。用状态空间描述碟形水下机器人的一般形式如下

对上式进行离散化的非线性模型

2 SVM辨识器设计
[8]中提到了关于单输入单输出系统的辨识模型,本文分别针对机器人俯仰角、横滚角、偏航角设计了基于SVM的碟形潜器的预测系统结构,如图2所示。

图2 SVM预测结构框图Fig 2 Structure block diagram of SVM identifier
在图2 中,T1(k),T2(k),T3(k),T4(k)分别代表 时刻4个推进器的输出量。xb(k),zb(k)为k时刻2个姿态调节质心块的偏移量,经过合成后作为输入u(k)与上一时刻3个输出的迭代结果v(k)一起作为3个SVM的输入量。θ(k+1),ψ(k+1),φ(k+1)分别为时刻机器人的俯仰角、横滚角和偏航角。
首先,针对求解线性回归问题,在如式(3)所示的线性函数集合中来估计回归函数

加入给定训练样本集

其中,xi∈X=Rl,yi∈Y=Rm,n,l,m分别为样本数与输入输出变量的维数。

那么,约束条件下基于经验风险最小化原理Remp(ω,b),需寻找ω,b使得它们最小化由松弛变量ξi(i=1,…,n),定义的下述变量

针对以上公式建立拉格朗日函数

上式的求解是一个复杂的优化问题,可以转换为给定正则化参数C值,变为求解式(8)与限定条件式(9)的凸优化问题。
可将该凸二次规划问题转换为求解



针对非线性问题则是通过核函数将非线性数据映射到高维空间,在高维空间中进行线性回归。因此,二次规划优化形式可转化为

其中,K(xi,xj)为核函数。
多输入多输出SVM回归估计函数则变为

对应

其中,阈值b为一常数如式(14)。将支持向量和参数代入式(13)即可求得

3 实验
3.1 测试环境与要求
本文实验水池参数为(长)17.3m×(宽)2m×(深)1.7m。该测试主要是测量机器人的3个姿态角,分别是俯仰角、横滚角和艏摇角,并且可以获得调节质心块偏移量、深度以及推力输出值。
机器人外观如图3。
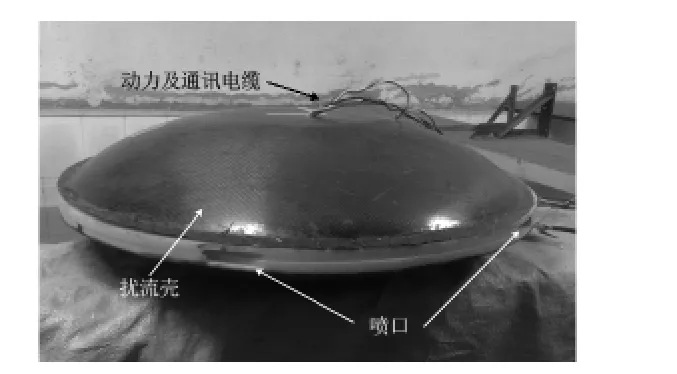
图3 机器人外观图Fig 3 Robot appearance
3.2 数据采集
在实验水池中,配重令机器人悬浮于水中,通过交替改变推力与2个质心块,对机器人姿态进行检测,分别有输入7个变量、输出3个变量,采样频率为5 Hz。
3.3 实验结果
为了便于SVM的训练,在进行模型辨识之前首先对样本数据进行了归一化处理。
本文采用径向积核函数

其中,核半径σ>0,该函数可以很好地逼近任意非线性关系,计算难度小。
通过均方差(MSE)的大小和平方相关系数与1的趋近程度来评判该SVM的辨识与预测效果。
这里把测得的2328组数据分为训练数据集2000组和328组测试数据集,利用网格搜索方法得到参数最优值,通过网格寻优得到等高线图,以SVM1为例得到的参数网格寻优等高线如图5所示。选取图中MSE最小位置点对应的C和g即为最优值,其中

因此,获得SVM最优效果参数如表1。

表1 SVM最优参数表Tab 1 Optimal parameters table of SVM
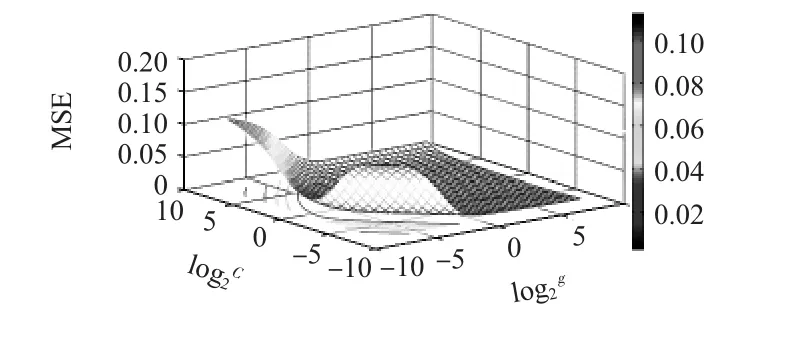
图4 SVM1参数网格寻优等高线图Fig 4 Contour map of grid optimization of SVM1 parameters
为了检测辨识精度,需要将测试样本输入到SVM模型当中针对实测角度输出数据进行比对,以SVM1为例的效果如图5所示。从辨识精度表2可以看出:该辨识器表现出良好的拟合与预测效果,一般机理建模所能达到的r2也仅有0.81左右。并且本文模型计算速度较快,因此,该模型完全适合应用到碟形潜器仿真、预测控制当中。

表2 辨识精度表Tab 2 Table of identification precision

图5 SVM1拟合数据对比图Fig 5 Contrast figure of SVM1 fitting datas
4 结束语
水下机器人存在自由度多、非线性和耦合强等特性。现有水下机器人建模方法存在很多缺陷,本文分析了一种新型碟形水下机器人的结构与控制特点,结合提出了碟形水下机器人系统的多输入多输出的SVM模型并求取了它的最优的参数。利用该算法对水下机器人姿态控制数据进行离线辨识得到了水下机器人的姿态控制模型后通过预测仿真并与真实数据进行比较,相似度至少可达97.82%,且预测计算速度均在秒级。可以看出:该模型具有预测精度高、实时性好的优点。
参考文献:
[1]马伟锋,胡 震.AUV的研究现状与发展趋势[J].火力与指挥控制,2008,33(6):129 -131.
[2]Fossen T.Nonlinear modeling and control of underwater vehicle[D].Trondheim:Norwegian Institute of Technology,1991.
[3]Healey A,Lienard D.Multivariable sliding node control for autonomous diving and steering of unmanned underwater vehicles[J].IEEE Journal of Ocean Eng,1993,18(13):327 -339.
[4]田亚杰,边信黔.应用全局最小二乘法辨识AUV运动参数[J].自动化技术与应用,2006,25(2):4 -7.
[5]刘建成,刘学敏,徐玉如.极大似然法在水下机器人系统辨识中的应用[J].哈尔滨工程大学学报,2001,22(5):1 -4.
[6]于开平,董好志,邹经湘.基于前向神经网的时变非线性结构系统辨识快速递推最小二乘法[J].振动工程学报,2007,20(5):963- 967.
[7]丁世飞,齐丙娟,谭红艳.支持向量机理论与算法研究综述[J].电子科技大学学报,2011,40(1):2 -10.
[8]李应红,尉询楷,刘建勋.支持向量机的工程应用[M].北京:兵器工业出版社,2004.12.
猜你喜欢
产业用纺织品(2022年4期)2022-08-25
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
人民长江(2021年5期)2021-07-20
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
建筑工程技术与设计(2015年5期)2015-10-21
铝加工(2014年4期)2014-04-12
航天器工程(2014年5期)2014-03-11