斗轮机煤场定位的控制算法
2013-01-15 09:33史春玲李一红
湖北工业大学学报 2013年2期
史春玲,李一红
(武汉大学动力与机械学院,湖北 武汉430074)
斗轮堆取料机(简称斗轮机)是火力发电厂输煤系统中取煤和堆煤的重要设备之一.为了使斗轮机运行效率更高,并确保煤粉混合均匀,节约资源,提高燃烧效率,在斗轮机堆煤和取煤时,必须对斗轮机进行准确定位[1].本文针对电厂输煤斗轮堆取料机煤场的定位算法进行了研究,以期进一步提高当前斗轮堆取料机的自动化程度.
1 斗轮机的结构
以轨道式斗轮机为例.斗轮机主要由金属架构、进料皮带机(尾车部分)、悬臂皮带机、回转机构、行走机构、斗轮及斗轮装置、俯仰液压机构等组成[2].
其中,进料皮带机位于尾车上.它依靠尾车上两组液压缸的作用,完成俯仰动作.回转机构主要由支撑部分与回转驱动装置组成.回转驱动装置一般安装在转盘尾部或侧部,安装在减速器输出轴上的驱动齿轮与轴承的外齿相啮合,通过电动机的动力传动,实现转盘以上部分对于门座的回转.行走机构是用来将斗轮机在轨道上往复运动的机构,可以进行堆、取料行走和调车行走.操作室为斗轮机的中枢,操作室与立柱相固定,由操作盘 、操作仪表、控制设备及配电屏等组成.
2 斗轮在煤场中的D-H表示法
斗轮机煤场定位系统由传感器、DSP及其外围电路等组成.斗轮机简化成机器人手臂形式的模型后,即可建立机构运动学方程.为描述斗轮机相邻构件间平移和转动关系,可用D-H(Danevit-Hartennberg)方法.D-H方法是为每个关节处的杆件坐标系建立4×4齐次变换矩阵,表示它与前一杆件坐标系的关系.这样逐步变换,即可用基座坐标来表示斗轮坐标.具体做法为:把构件坐标系嵌入斗轮机的每一个连杆机构中,用齐次变换来描述这些坐标系之间的相对位置和方向.描述一个连杆与下一个连杆之间关系的齐次变换矩阵记为An矩阵(其中n表示第n个连杆).假设斗轮机简化模型尺寸如图1所示[3].
连杆各参数作如下定义:转角θn,连杆n绕关节n的Zn-1轴的转角,右手法则;距离dn,连杆n沿关节n的Zn-1轴的位移,沿Zn-1正向为正;长度an,连杆n沿Xn方向上的长度,Xn正向一致;扭角αn,连杆n两关节轴线之间的扭角,右手法则.
对于斗轮机基座即行走机构来讲,距离d1是其关节变量;对于回转机构和俯仰机构来讲,转角θ2、θ3是其关节变量.
斗轮机各连杆坐标系建立后,n-1系与n系之间的变换关系可用坐标系的平移、旋转来实现.从n-1系到n系的变换步骤如下:
1)令n-1系绕Zn-1轴旋转θ角,使Xn-1与Xn平行;
2)沿Zn-1轴平移dn,使Xn-1与Xn重合;
3)沿Xn-1轴平移an,使两个坐标系原点重合;
4)绕Xn-1的轴旋转αn角,使得n-1系与n系重合.

图1 斗轮机简化模型尺寸
用一个总的变换矩阵An来表示连杆n的齐次变换矩阵为:

这样,第n系中的点rn在第n-1系中可表示为

由此可推出第n坐标相对于基座坐标系位置齐次变换矩阵为

式中,[nnpnqn]是固连在第n个杆件上的第n个坐标系的姿态矩阵,Wn是由基座坐标系原点指向第n个坐标系原点的位置矢量.
对于斗轮机而言,斗轮机斗轮相对于行走机构的位置齐次变换矩阵为

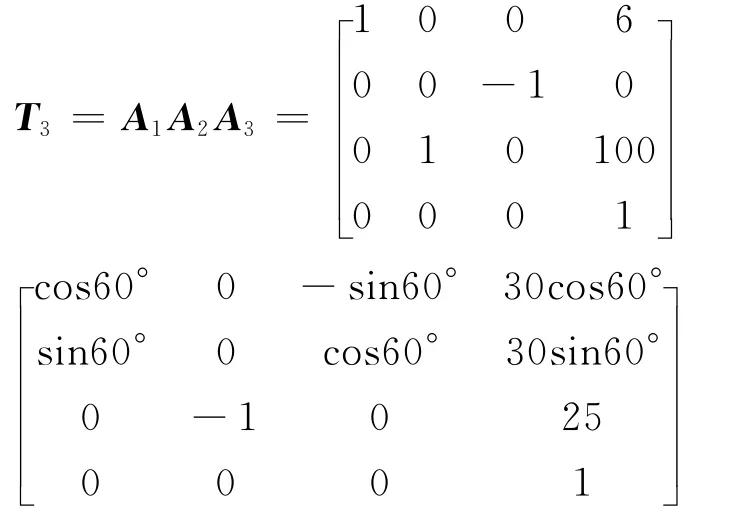
只要求出A1、A2、A3,便可得到斗轮机斗轮相对于基座坐标系位置齐次变换矩阵.
确定斗轮的运动方程后,即可对斗轮进行准确的坐标定位.
3 算法示例
假设有一斗轮机行走轮到回转中心距离为12 m,回转中心轴到俯仰铰点距离85m,俯仰铰点到轮中心点距离6m,回转中心至地面带轮的距离为25m.建立图1所示的坐标系,斗轮机初始位置在参考坐标系(X0,Y0,Z0)中为P(1000).斗轮机俯仰角度10°,接着回转角度为60°,向前行走100m.求运动后,斗轮相对于参考坐标系的坐标.

所以位置齐次变换矩阵为
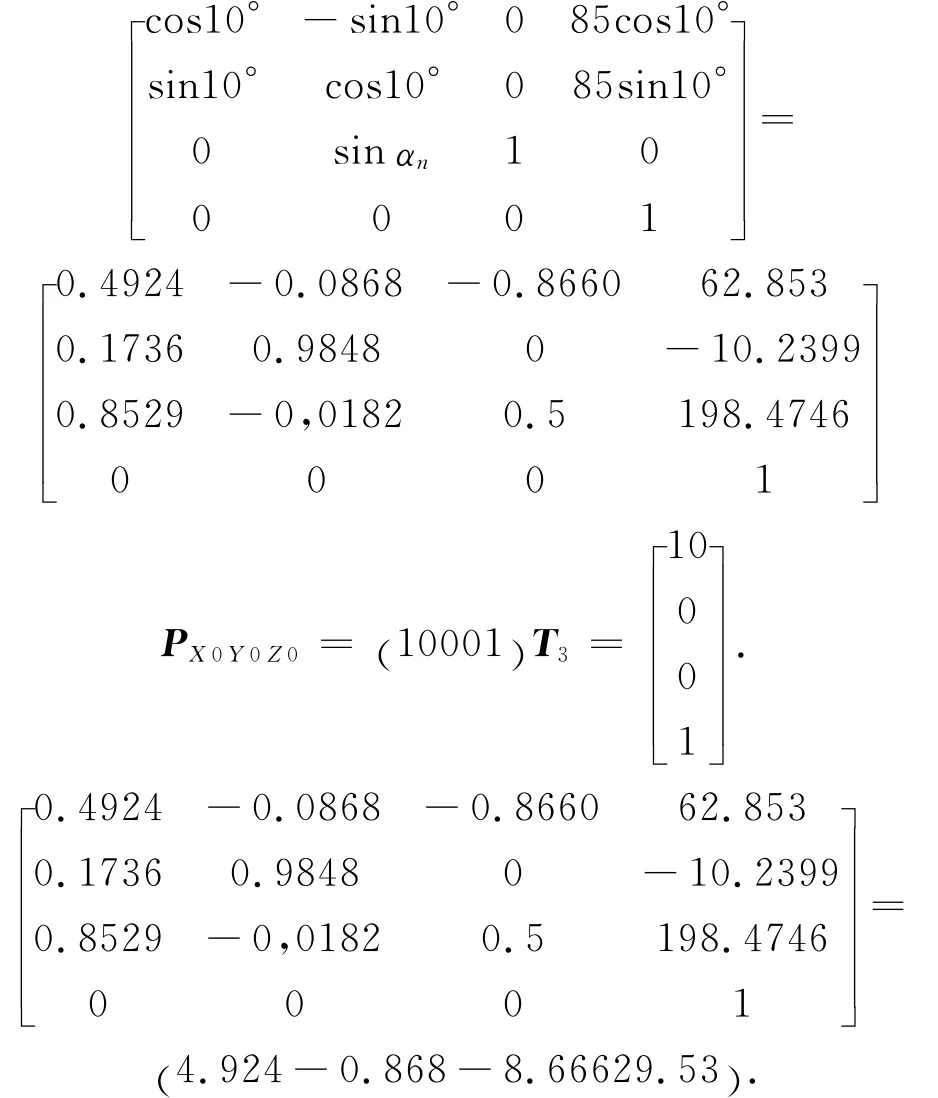
解之得 X0=4.924/629.53=0.0078,Y0=-0.868/629.53=-0.0014,Z0=-8.66/629.53=-0.0138.
综上所述,经过一系列的变换后,P点相对于参 考 坐 标 系 (X0,Y0,Z0) 的 坐 标 为 (0.0078,-0.0014,-0.0138).
4 结束语
电厂输煤系统面积较大,电煤在煤场中的储运是随机的,如何实现斗轮机高效输送电煤,如何在煤场中对斗轮机准确定位,以准确控制论斗轮相对煤堆的位置,进而提高输煤效率,对保证锅炉的正常运行,提高生产效率具有一定的现实意义.斗轮机的安全、有效运行,对电厂的正常、持续运转起关键作用.
[1] 国电太原第一热电厂.输煤系统和设备[M].北京:中国电力出版社,2008:2-5.
[2] 中国动力工程学会.火力发电厂设备技术手册第四卷火电站系统与辅机[M].北京:机械工业出版社,1998:5-12.
[3] 计算机辅助设计与制造[M].北京:中国水利水电出版社,2004.
猜你喜欢
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
港口装卸(2020年3期)2020-06-30
现代营销·理论(2019年10期)2019-09-10
动漫星空(兴趣百科)(2017年3期)2017-11-07
电站辅机(2016年4期)2016-05-17
学习月刊(2015年22期)2015-02-28
中国工程咨询(2015年6期)2015-02-16
环球市场信息导报(2015年48期)2015-01-03
中国航海(2014年1期)2014-05-09