基于激光准直的轨道长波检测关键算法的研究
2013-06-05 09:49王志勇朱洪涛钱计妙
铁道标准设计 2013年7期
王志勇,魏 晖,朱洪涛,李 灵,钱计妙
基于激光准直的轨道长波检测关键算法的研究
王志勇1,2,魏 晖1,3,朱洪涛1,李 灵1,钱计妙2
(1.南昌大学机电工程学院,南昌 330031;2.江西日月明铁道设备开发有限公司,南昌 330029; 3.江西科技学院汽车工程学院,南昌 330098)
轨道不平顺是引起列车产生振动的主要原因。有资料报道,列车的激烈振动主要是轨道的长波不平顺引起的。轨道长波高平顺对高速列车安全、快速和舒适起关键性作用。目前,轨道长波不平顺尚无可靠、高效的检测手段。把激光准直技术应用到轨道长波不平顺检测是当前研究的一个方向。为减小激光准直精度对轨道长波检测精度的影响,提出分次测量、建立测量数据二维坐标转换模型,并对模型进行误差分析。应用Matlab进行算法仿真,测量精度比直接测量提高了约0.19mm,表明该算法的可行性,可以应用于轨道长波不平顺检测。
高速铁路;激光准直;长波不平顺;轨道检测;二维坐标转换
国外在发展客运专线时发现,当列车高速(200 km/h以上)运行时会出现“1 Hz现象”[1],即车体以1 Hz左右的频率振动加剧。如特定长度的轨道不平顺对车辆产生的强迫振动频率与车辆自振频率接近,将导致车辆振动明显增强,乘坐舒适性显著降低[2]。轨道长波不平顺分为轨向和高低不平顺[3]。当车辆运行速度为300~350 km/h时,与车辆自振频率接近的轨道不平顺波长为83~97m。
目前,轨道长波不平顺状态检测主要依靠基于全站仪的轨道测量仪[4],如GRP轨道检测小车和SGJ-T轨道测量仪。但因全站仪对环境适用性差、测量效率低,故轨道测量仪用于轨道日常检修受到很大的限制。而基于弦测法或惯性基准法[56]的GJY系列轨道检查仪虽然具有较高的测量效率和良好的环境适应能力,然而从测量原理上讲,这类仪器由于不能测量轨道外部几何尺寸,均有一定的误差累积,故难以对长大的长波不平顺进行高精度检测。目前,GJY-T3型0级轨道检查仪能以2mm的重复性检测70m波长的长波不平顺。北京拉特激光的GPJ-A01轨道平顺度激光检测仪及铁科院铁建所JGJY激光长弦检测仪[78],有效检测距离≮100m,标称检测精度达到2mm以内,实现了长波轨向和高低偏差精密检测,适合道岔、隧道等特殊地段和夜间作业需求。然而,该检测仪受到结构尺寸的限制,难以满足对曲线的长波测量的要求。
轨道长波不平顺极大地影响列车安全,并加速列车车轮和轨道结构的破坏[9]。为了更好地满足高速列车安全性和舒适性的要求,如何对各类线型准确全面地检测出轨道长波不平顺,是保证轨道高平顺性的重大课题。
1 基于激光准直的长波测量系统构成
1.1 测量系统构成
系统测量原理是以激光准直技术为基础[8],激光发射小车上的激光器发射一束准直光束,工业相机拍摄接收屏上的光斑图像,经上位机处理获得光斑中心坐标。光斑中心坐标的变化反映了轨道轨向和高低的状态变化,系统如图1所示。
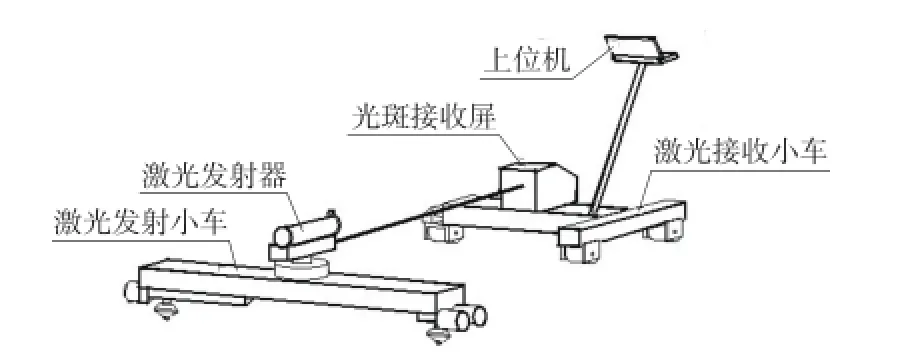
图1 测量系统构成
1.2 激光准直测量方法简介
测量时,固定激光发射小车,推激光接收小车前进,接收小车上的单片机系统进行数据(轨距,水平等)采集和通讯,同时工业相机采集光斑图像,把数据和图像传到上位机在线处理。为了精确定位光斑中心坐标,光斑图像处理算法综合运用了中值滤波,自适应阀值算法,形态学滤波法和光斑重心法[10]。
激光测量方向性好,但由于激光漂移、光线弯曲和空气扰动等原因,其准直性存在一定的误差[1112]。在测量100、200m弦长的轨道不平顺时,激光的准直精度达不到测量长度要求。激光角漂在10-4~10-5rad时,角漂对长波不平顺的测量将产生不可忽视的影响。例如,系统选用10-5rad级角漂的激光准直,意味着距离激光发射点100 m处的光斑有1 mm的游移范围。另据文献[13],高速铁路平面半径Rmin=3 500 m,当对其进行150m/300m校核时,其弦矢高可达3m,即便是100m中点弦测量,其中点矢距亦可达0.35m。此即意味着,采用激光准直技术直接测量曲线轨道长波不平顺,其光斑接收屏结构尺寸将达米级。综上,激光准直测量距离就受到一定限制。
2 长波不平顺检测算法
2.1 长波不平顺的激光准直分次测量
针对上述轨道检测的技术问题,本文提出分次测量,建立测量数据坐标转换模型,实现轨道长波的检测。将激光发射小车在第一次测量时所在位置作为基准坐标系,通过重复测量段数据求解坐标转换参数,把激光发射小车第2次,第3次,第n次测量坐标系数据变换到基准坐标系下,得到相对基准坐标系随里程变化的轨向值和高低值。为了保证重复段数据配准,可以采用标记法或自适应匹配法。
由于高程坐标与平面坐标正交,故仅以测量轨向为例进行说明。如图2所示,对曲线P1P(n进行平面测量。当测距l里程间隔较远时,首先置激光发射小车于测量起始点P1,瞄准后推行激光接收小车至C2,采集P1至C2的轨道平面数据。此时,以激光弦l1为x轴,建立基准坐标系{O;x,y};之后,将激光发射小车移动至P2点,接收小车再往回推行到C1处,瞄准后推行激光接收小车至C3采集C1至C3的轨道平面数据,其中C1C2是搭接测量段。此时以激光弦l2为x(1)轴,建立独立坐标系{O(1);x(1),y(1)};相应,移动激光发射小车于P3、P4、…,分别测量C3C5、C4C6、…数据,其中C3C4,C5C6是搭接段。
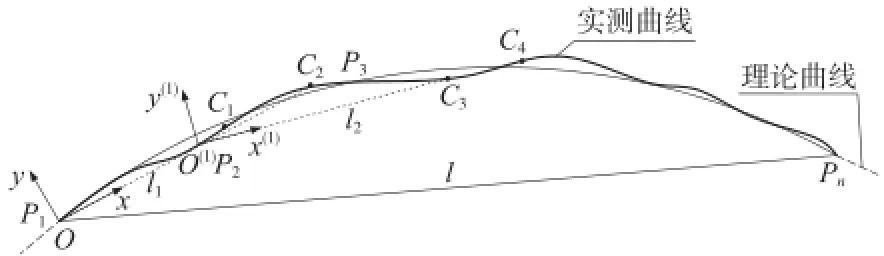
图2 轨向测量原理
2.2 长波不平顺检测算法模型
设{O;x,y}和{O(1);x(1),y(1)}为平面内的两个坐标系,横坐标是里程,纵坐标是轨向或高低值,如图3所示。
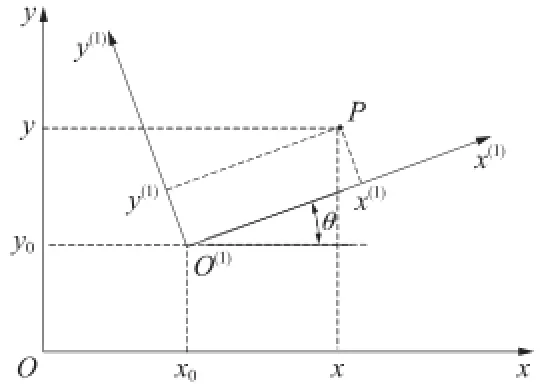
图3 坐标系转换示意
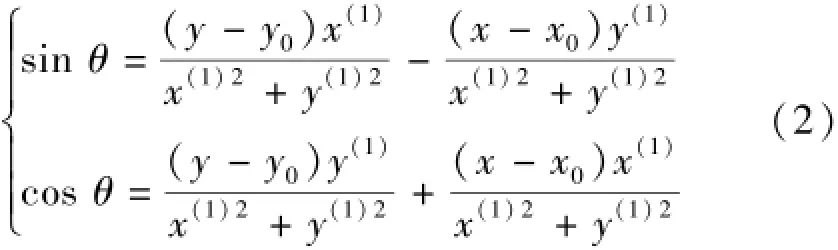
设P是平面内任意一点,在坐标系{O;x,y}和{O(1);x(1),y(1)}的测得数据分别为(x,y)与(x(1), y(1)),O(1)点在坐标系{O;x,y}中的坐标为(x0,y0)。由平面直角坐标变换公式得

由式(1),可解得两坐标系的旋转角θ
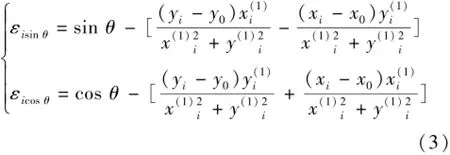
设重复测量段有N组数据,i∈N,对cosθ,sinθ取残差有(残差方程式)
当测量误差无偏、正态独立条件下,求其算术平均可得估计量的最可信赖值。设在全量程内取N个标定点,由式(3),有
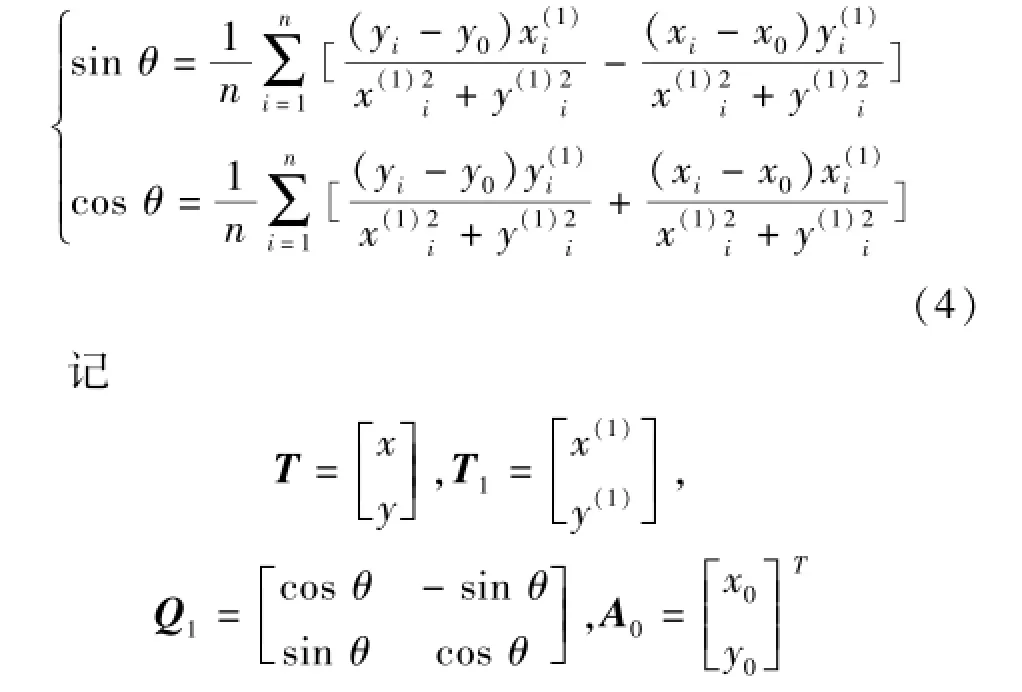
则式(1)可写成矩阵形式

设进行平面坐标系{O(M);x(M),y(M)}到{O(M-1); x(M-1),y(M-1)}坐标变换,则旋转矩阵
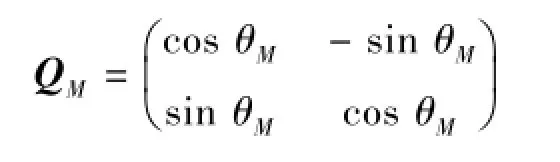
M=1,2,…,k,…,θM是第M个坐标系与第M-1个坐标系之间的转向角。QM为{O(M);x(M),y(M)}到{O(M-1);x(M-1),y(M-1)}的旋转矩阵;TM=[x(M), y(M)]T,TM为测量数据在平面坐标系{O(M);x(M), y(M)}中的坐标值;AM-1=[x(M-1)0,y(M-1)0]T,AM-1为平面坐标系{O(M);x(M),y(M)}坐标原点在{O(M-1);x(M-1), y(M-1)}中的平移向量。
把每段激光弦长的数据坐标值转化为前一段弦长所在坐标系,有

图2所示,可将各独立坐标系{O(M);x(M),y(M)}下的短波测量数据按式(6)变换为基准坐标系{O;x, y}下的长波测量数据。坐标转换关系可表达为


3 算法误差分析
通过式(7)进行坐标转换,得到在基准坐标系{O; x,y}下的轨道平面曲线,即可依据文献[13]进行轨道平顺性评价,但显然式(7)引入的误差将随着M的增加而显著增加,故应限制检测波长。在列车运行速度350 km/h,列车敏感的不平顺波长≯150 m。当设站距离60m、搭接段长度20 m的条件下,最多需要3次坐标转换即可满足要求,故一般情况下M≤3。由于QM是用最小二乘法原理求出的,总是存在误差,设其误差为ε(QM)。以M=3为例分析算法误差。由式(7)得

根据多元函数的误差计算公式,得误差ε(T)为

以扣件节点0.625m间距计算,搭接点数N=33。在此条件下,sinθ、cosθ的中误差约为直接计算的1/6。随着搭接段长度的增加,搭接精度将逐渐提高,但计算量也将显著增加。故一般条件下,搭接段长度取20m。
4 算法仿真
为了验证算法,以测量弦长l=100 m,R=7 000m的圆曲线的轨向平顺性为例,分两次测量,第一次测量60m,第二次测量60m,实现100m弦长的测量。利用Matlab生成轨道自身不平顺和激光角漂误差数据,如图4所示。里程40~60m为重复段测量数据。

图4 仿真测量数据
利用本文算法,计算旋转矩阵结果如表1所示。把第二次测量数据转换到第一次测量坐标系,得100m弦测量值如图5所示。

表1 计算结果
算法误差分析,由表1得坐标系转换均值误差

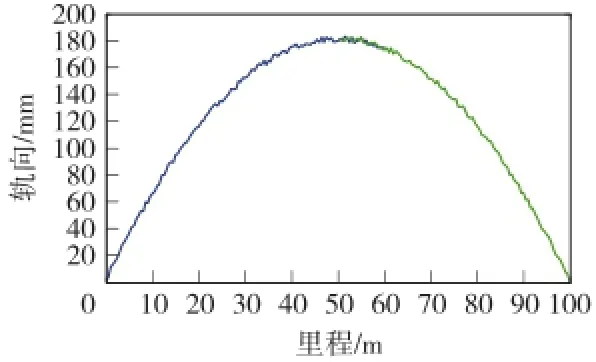
图5 100 m弦轨向测量值
代入式(7),坐标转换产生的最大里程误差εx为21.462 2 mm,最大轨向误差εy为0.210 5 mm。因此,本算法计算的轨向不平顺最大误差为
ε=60 000×10-5+ε2=0.810 5mm<1mm
5 结语
本文分析了当前高速铁路轨道长波检测仪器的现状,研究了基于激光准直技术的轨道长波检测仪。针对长距离激光准直精度不够问题和光斑接收屏限制,建立了多次测量坐标转换模型,并对算法进行了误差分析和仿真计算,根据仿真的结果,轨向测量精度比直接测量提高了约0.19 mm,可以应用于轨道长波不平顺检测。
本文提出的多次测量数据拼接模型不仅可以运用于铁路轨道,还可运用于电梯导轨、起重机轨道等直线度检测的数据处理。
[1] 罗林.高速铁路轨道必须具有高平顺性[J].中国铁路,2000(9): 8- 11.
[2] 王开云,翟婉明,刘建新,等.线路不平顺波长对提速列车横向舒适性影响[J].交通运输工程学报,2007,7(1):1- 5.
[3] 翟婉明.车辆—轨道耦合动力学[M].2版.北京:中国铁道出版社,2001.
[4] 王成.无砟轨道平顺性控制技术探讨[J].铁道标准设计,2009 (S1):57- 59.
[5] ESVELD C.Principles of track quality recording and assessment[J]. Rail International,1992,18(1):10- 18.
[6] 杜鹤亭.长波长轨道不平顺检测中的数字滤波方法[J].中国铁道科学,2000,21(4):58- 65.
[7] 刘洪云,王彦春,王培昌,等.GPJ-A01轨道平顺度激光检测仪[Z].北京:通州区科委,2010.
[8] 高春雷,王发灯.利用激光准直技术检测线路的长波不平顺[J].铁道建筑,2009(1):81- 85.
[9] 练松良,黄俊飞.客货共运线路轨道不平顺不利波长的分析研究[J].铁道学报,2004,26(2):111- 115.
[10]Gonzalez R C,Woods R E.数字图象处理[M].2版.阮秋琦,阮宇智,译.北京:电子工业出版社,2007.
[11]方仲彦,殷纯永,梁晋文.高精度激光准直技术的研究(一)[J].航空计测技术,1997,17(1):3- 6.
[12]方仲彦,殷纯永,梁晋文.高精度激光准直技术的研究(二)[J].航空计测技术,1997,17(2):5- 8.
[13]中华人民共和国铁道部.TB 10621—2009高速铁路设计规范[S].北京:中国铁道出版社,2009.
Study on Key Algorithm of Track Long W ave Detection Based on Laser A lignm ent
WANG Zhi-yong,WEIHui,ZHU Hong-tao,LILing,QIAN Ji-miao
(1.School of Mechatronics Engineering,Nanchang University,Nanchan 330031,China; 2.Jiangxi Everbright Railway Equipment Development Co.,Ltd.,Nanchang330029,China; 3.School of Automotive engineering,Jiangxi University of Technology,Nanchang 330098,China)
Track irregularity is the principal factor which gives rise to vibration of train.It has been reported that the violent vibration of train is caused by long wave irregularity of track.That is,the long wave regularity plays a critical role in safety,speediness and ride com fort of high-speed train.Atpresent,however,there is no reliable and efficientmanner for the detection of long wave irregularities of track.So,it is a current research direction to introduce laser alignment technology into long wave irregularity detection of track.In order to weaken the unfavorable effect on long wave irregularity detection accuracy caused by laser alignment accuracy,a fractionated measurement method was proposed,two-dimensional coordinate transformationmode ofmeasure data was established in this paper, and error analysis of the mode was carried out.Afterwards,the results of algorithm simulation using Matlab show that,the accuracy of this algorithm is about 0.19 mm higher than that of traditional algorithm,that is to say,this algorithm is feasible and can be used in long wave irregularity detection of the track.
high-speed railway;laser alignment;long wave irregularity;track detection;twodimensional coordinate transformation
U216.3
A
1004- 2954(2013)07- 0012- 04
2012- 12- 06;
2012- 12- 14
江西省科技支撑项目(编号:20111102040100)
王志勇(1973—),男,讲师,工学硕士,博士研究生,E-mail: wzy_ncu@163.com。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
数学物理学报(2021年3期)2021-07-19
装备制造技术(2020年2期)2020-12-14
今日农业(2019年12期)2019-08-15
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中国铁道科学(2015年4期)2015-06-21
中国光学(2015年1期)2015-06-06
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
汽车与新动力(2012年5期)2012-03-25