
船用装卸臂电液快速连接器的应用
2013-08-24 02:14韩会林张圣康孙兰萍
科技传播 2013年16期
韩会林,郑 普,张圣康,孙兰萍
连云港远洋流体装卸设备有限公司,江苏连云港 222062
随着对船用装卸臂的自动化水平和安全性能的要求越来越高,原有的手动快速接头已无法满足使用需求。笔者公司为此开发了一种可以快速连接和脱离的电液快速连接器。
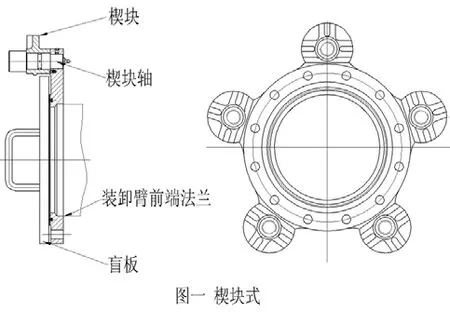
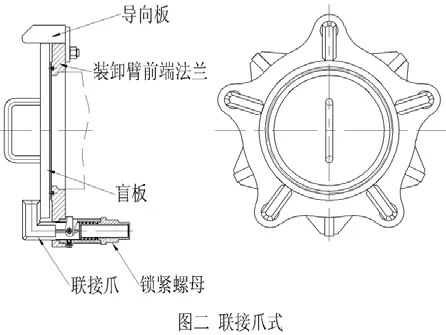
传统的快速连接器为手动快速接头,安装在装卸臂的前端法兰上;有两种结构方式:楔块式(如图一)和联接爪式(如图二),根据法兰口径和压力等级的不同,标准的手快快速接头配置3 ~8 个标准楔块或联接爪;连接时,首先使装卸臂接头法兰与货轮歧管法兰贴近至允许连接范围,对于楔块式人工通过专用工具转动楔块使其坡面跟进压紧两片连接法兰达到密封连接以传输各种液体和气体介质;而联接爪式要先转动联接爪至法兰正方向然后旋动联接爪后面的锁紧螺母使两片连接法兰贴紧达到密封连接;当装卸物料完成后,进行装卸臂与货轮脱离时,需要反向重复上述动作。人工操作不但劳动强度大,而且管线内残留的化工介质会对工作人员造成人身伤害。当遇到低温介质时(液化气、液氨等),人工操作也极为不方便。
笔者公司在国外同类产品的基础上研发改进出新型的电液快速连接器,它安装在输油臂前端,使装卸臂在移动到槽船歧管法兰附近时可以快速实现连接的一种装置,它的主要优点是:1)快速自动连接和分离;2)不同的船舶法兰连接时不用使用变径管,可以直连;3)采用遥控电液控制,大大减少劳动强度,和远离危险环境;4)电液失效的情况下能够手动脱离。新型的电液快速连接器的使用使码头作业更加快速、安全、可靠。
1 该电液快速连接器的结构
该装置结构如图三所示,主要组成如下:
1)压紧机构:该机构由关节轴承2、特制芯轴3、压缩弹簧4 组成。该机构是锁紧的主要动力源;
2)回转机构:该机构由回转环5、固定环6、油缸8、油缸支座9 组成。该机构通过油缸伸缩推动回转环相对固定环旋转,从而推动压紧机构;
3)管线主体:管线主体是由上连接法兰7、管道、下对接法兰、加强环、导向板、卡转支座组成。它是产品的主体结构;
4)卡爪:卡爪是连接法兰的压紧执行机构,通过卡爪将槽船管线法兰卡紧;
5)液压控制元件:该元件作为装卸臂液压控制系统的一部分,具有独立的液压回路。可以给予电液快速连接器的连接和脱离动作提供稳定可靠地动力;
6)电气控制元件。该控制元件集成在装卸臂的控制系统之中是实现快速连接器连接与脱离动作的指挥系统,可以远程或遥控操作。

2 该电液快速连接器的工作原理
电液快速连接器在电气液压系统的控制下,通过主控制面板按钮或遥控器操作,首先打开卡爪至卡爪打开限位位置,取下盲法兰,操作装卸臂使连接器沿导向板与槽船管线法兰对中靠近,直至两篇法兰间的间隙小于5mm。启动卡紧动作,油缸杆拉动回转环旋转,推动压紧机构的末端行走,从而使卡爪绕销轴转向船端法兰非密封面,通过压缩弹簧释放的压力缩小两片连接法兰的距离和使密封圈产生密封变形,当压紧机构的末端行走到压紧限位位置时,压紧动作完成。此时压紧机构处于机械自锁角(即压紧机构与卡爪侧平面形成反向3°以上的夹角),压缩弹簧所释放的压力,通过卡爪传递至法兰面上的压力不小于法兰在装卸臂工作状态下可能的外力对连接法兰处所产生的破坏载荷的总和。
当物料装卸工作完成后,首先进行装卸臂管线的排空吹扫工作,在确保管线内无介质,无压力的情况下操作装卸臂的复位工作,启动卡爪打开按钮,油缸反方向推动回转环旋转,拉动压紧机构回初始位置,释放弹簧,进而带动卡爪旋转,使卡爪打开并回到开启位置。此时装卸臂的快速连接器与槽船分离,操作装卸臂回到锁紧位置。
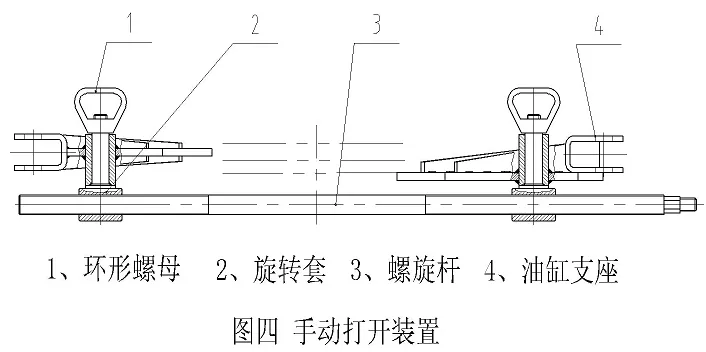
当因故障断电时,液压系统无法工作,为使装卸臂与槽船分离,笔者公司研制了手动打开装置,通过人工将卡爪打开。如图四所示:将该装置安装在电液快速连接器的油缸支座上,用扳手旋动螺旋杆3,螺旋杆旋转带动旋转套2 往外移动带动油缸支耳移动,从而打开卡爪,实现分离。
3 技术参数
基本参数

公称压力(MPa) -0.06 0.6 1.0 1.6 2.5 4.0 6.3工作温度(℃) -50~200基本通径(DN)150 200 250 300 350 400 500包络范围(DN)100 150 100 200 150 250 200 300 250 350 300 400主体材料 碳钢 304 316密封材料 橡胶 PTFE
4 结论与展望
基于国内石化行业的快速发展的需求,装卸臂具有比较广阔的发展前景,与其配套的电液快速连接器也将得到广泛的应用。但与国外的同类设备相比较还有一定差距,需要在今后的设计生产中不断的改进。
[1]装卸臂的设计和结构规范[D].3版.石油公司国际海洋论坛(OCIMF),1999.
猜你喜欢
武汉理工大学学报(交通科学与工程版)(2022年5期)2022-11-10
汽车实用技术(2022年19期)2022-10-19
北京航空航天大学学报(2022年6期)2022-07-02
一重技术(2021年5期)2022-01-18
机械制造(2021年11期)2021-12-13
化工管理(2021年7期)2021-05-13
内江科技(2021年3期)2021-04-04
中国机械工程(2021年3期)2021-02-22
装备制造技术(2020年3期)2020-12-25
机械制造与自动化(2020年3期)2020-07-16
