线性离散时滞系统的输出反馈镇定
2013-09-20 06:04马维军朱寰宇张显
电机与控制学报 2013年1期
马维军, 朱寰宇, 张显
(黑龙江大学数学科学学院,黑龙江哈尔滨 150080)
0 引言
由于时变时滞系统较定常时滞系统具有更广泛的工程背景[1-2],近几年得到了人们普遍的关注。特别地,一些学者研究了带有时变时滞的线性离散系统的稳定性及镇定问题。然而,稳定性和状态反馈镇定问题的研究成果不能直接应用到输出反馈镇定问题,因而对输出反馈镇定问题的研究就变得尤为重要。Gao等[3],Liu等[4],He等[5],Chen和Fong[6]针对这类系统的输出反馈镇定问题进行了研究。
目前对带有区间时变时滞的离散系统的静态输出反馈(static output feedback,SOF)控制器的设计主要采用自由权矩阵和Lyapunov理论相结合的方法。Gao等[3]和Liu等[4]使用相同的Lyapunov函数V(k)来获得SOF镇定判据。它们之间的区别是:Gao等[3]忽略了 ΔV(k)中一个负项,而Liu等[4]将这个负项用一个不等式来放缩,这两种方法增加了结果的保守性。Chen和Fong[6]所选择的Lyapunov函数虽然表面上不同于文献[3-4]中的,但是在本质上是相同的。Chen和Fong[6]利用等式来处理前面提到的负项,这降低了结果的保守性。不同于[3-4,6]中的方法,He等[5]构造了包含更多时滞信息的Lyapunov函数,由此得到了具有较低保守性的SOF镇定判据。为了处理这类系统的SOF镇定判据中的非线性约束,Gao等[3],Liu等[4]和He等[5]使用了锥补线性化(cone complementary linearization,CCL)算法,而Chen和Fong[6]利用不等式将非线性约束转化为线性条件,这当然增加了结果的保守性。进一步,Gao等[3],Liu等[4]和He等[5]将动态输出反馈(dynamic output feedback,DOF)镇定问题转换成SOF镇定问题,得到了带有时变时滞的离散系统的DOF镇定判据。
本文研究带有时变时滞的线性离散系统的镇定问题。通过使用Lyapunov方法且应用Jensen不等式到时滞区间的每个子区间,得到了这类系统的时滞依赖的SOF和DOF镇定判据。经过理论的和数值的比较发现,本文提出的镇定判据的保守性弱于文献中的。由于镇定判据中存在非线性约束,CCL算法被用来求解输出反馈增益矩阵。数值算例也说明了本文所给出的方法的优越性。
1 问题描述
考虑如下含区间时变时滞的线性离散系统
式中:x(k)是n维状态向量;φ(k)为x(k)的初始状态;u(k)是m维控制输入;y(k)是p维可测量输出;A,Ad,B,C和Cd是具有适当维数的常数矩阵;d(k)为区间时滞并满足dm≤d(k)≤dM;dm和dM是已知的正整数。

将SOF控制器

代入系统(1),得到闭环系统

其中,F∈Rm×p是SOF增益矩阵。
将DOF控制器
代入系统(1),得到闭环系统
其中,xc(k)是r维控制器状态,~φ(k)是ξ(k)的初始状态;

Ac,Bc,Cc和Dc是DOF增益矩阵。
本文的主要目标是:设计形如(2)的SOF控制器和形如(4)的DOF控制器,使得闭环系统(3)和(5)是渐近稳定的,并将本文提出的方法与以往存在的方法进行理论上和数值上的比较。
2 预备知识
引理1[5]Theorem2对于给定的dm和dM,dM>dm,系统(1)可由控制器(2)镇定,如果存在实矩阵P>0,V>0,Qi>0(i=1,2,3),Zj>0,F,
使得
其中
引理2[3]Theorem2对于给定的dm和dM,dM>dm,系统(1)可由控制器(2)镇定,如果存在矩阵V>0,P>0,V1>0,G>0,H,Q>0,Z>0和SOF增益矩阵F满足
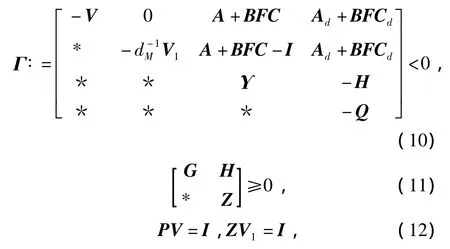
其中,Υ∶=-P+dMG+H+HT+(dMm+1)Q。
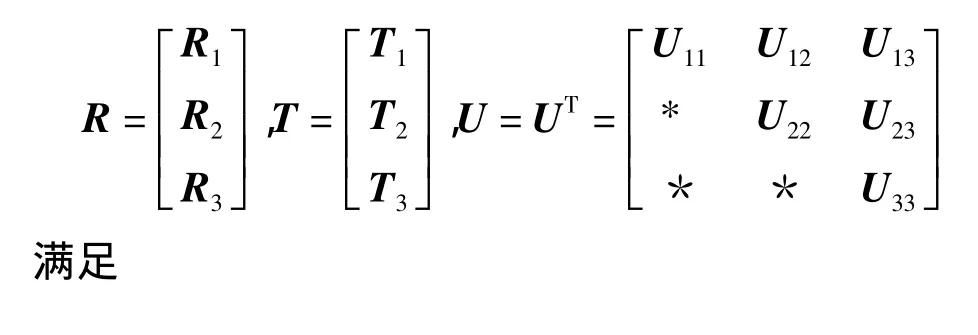
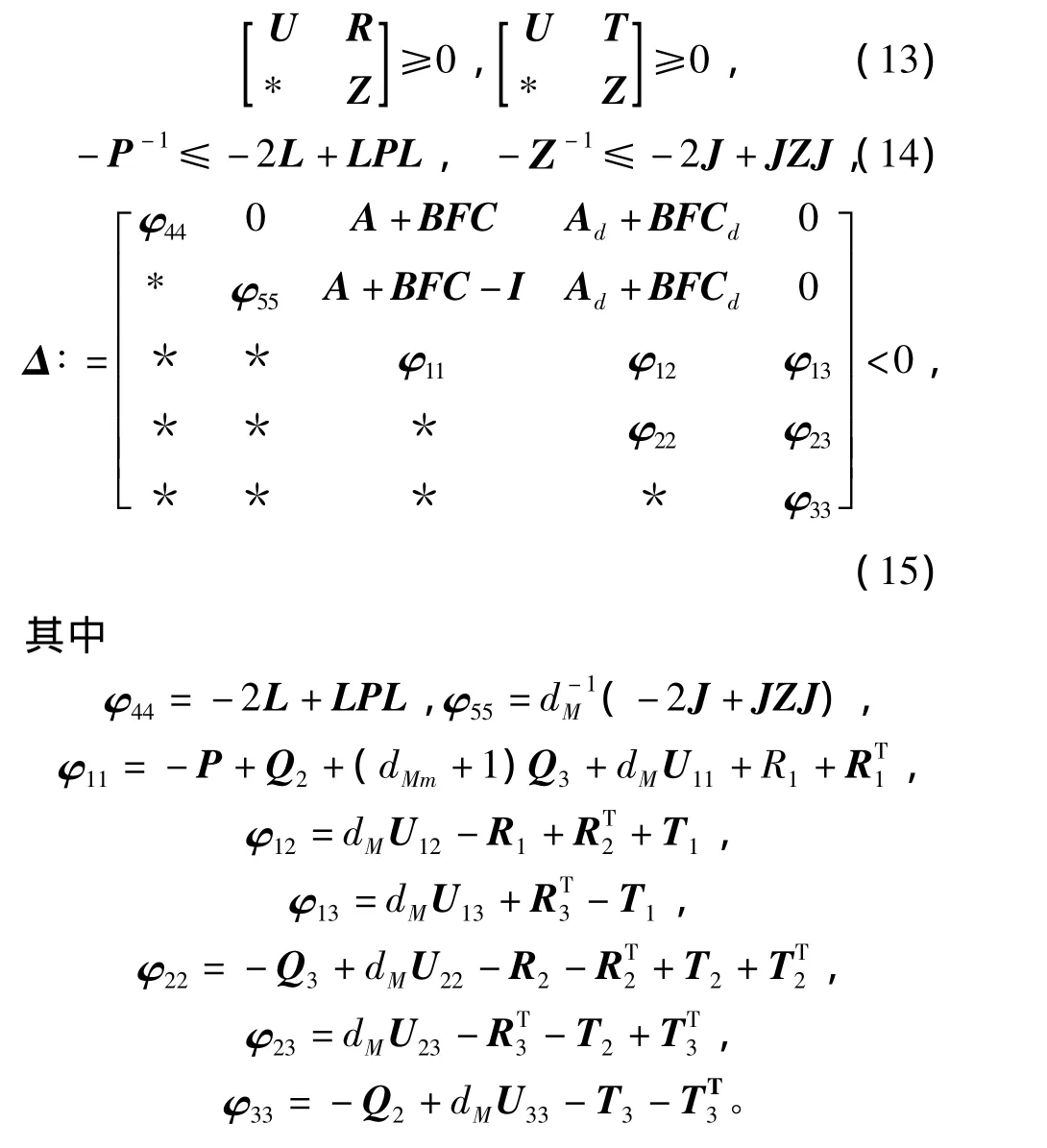
引理3[6]Theorem3系统(1)可由控制器(2)镇定,如果存在矩阵F,L>0,J>0,P>0,Qi>0,i=2,3,Z>0,
3 静态输出反馈镇定
本节将给出系统(1)可由SOF控制器(2)镇定的时滞依赖的判据,并将该判据与[5]Theorem 2,[3]Theorem 2和[6]Theorem 3进行理论比较。
3.1 静态输出反馈镇定判据
下面定理给出了系统(1)可由SOF控制器(2)镇定的充分条件。其主要思想是首先s等分时滞的变化区间,然后分别讨论时滞落入每个子区间的情形,从而给出系统(1)可由SOF控制器(2)镇定的充分条件。通过这个划分可以降低结果的保守性。
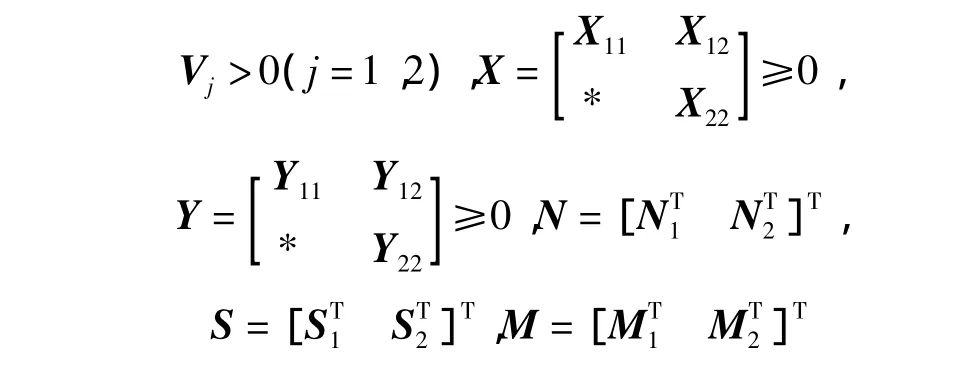
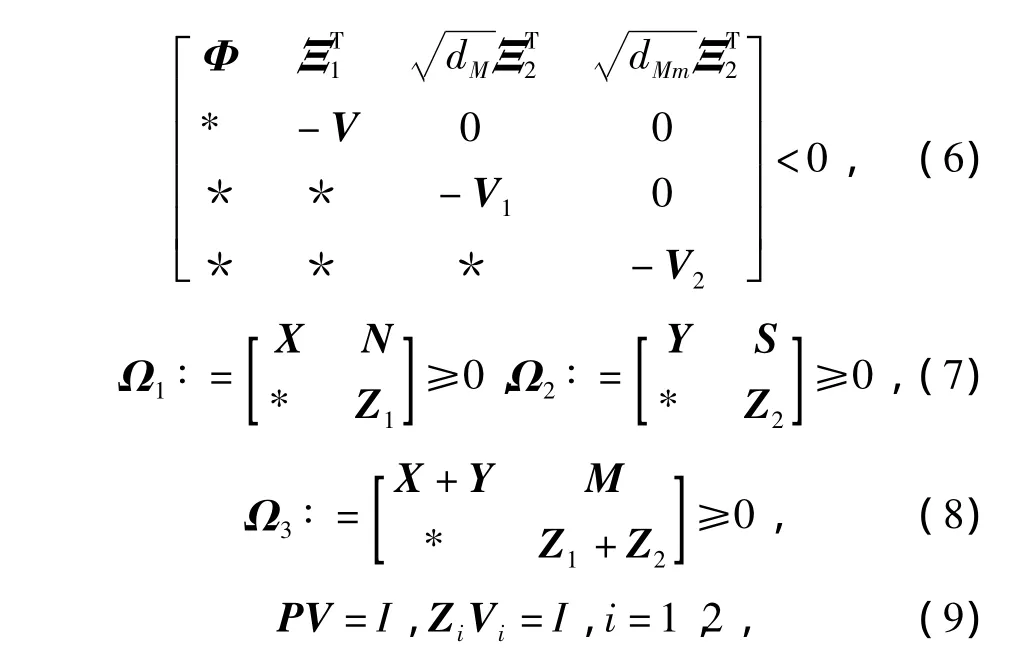
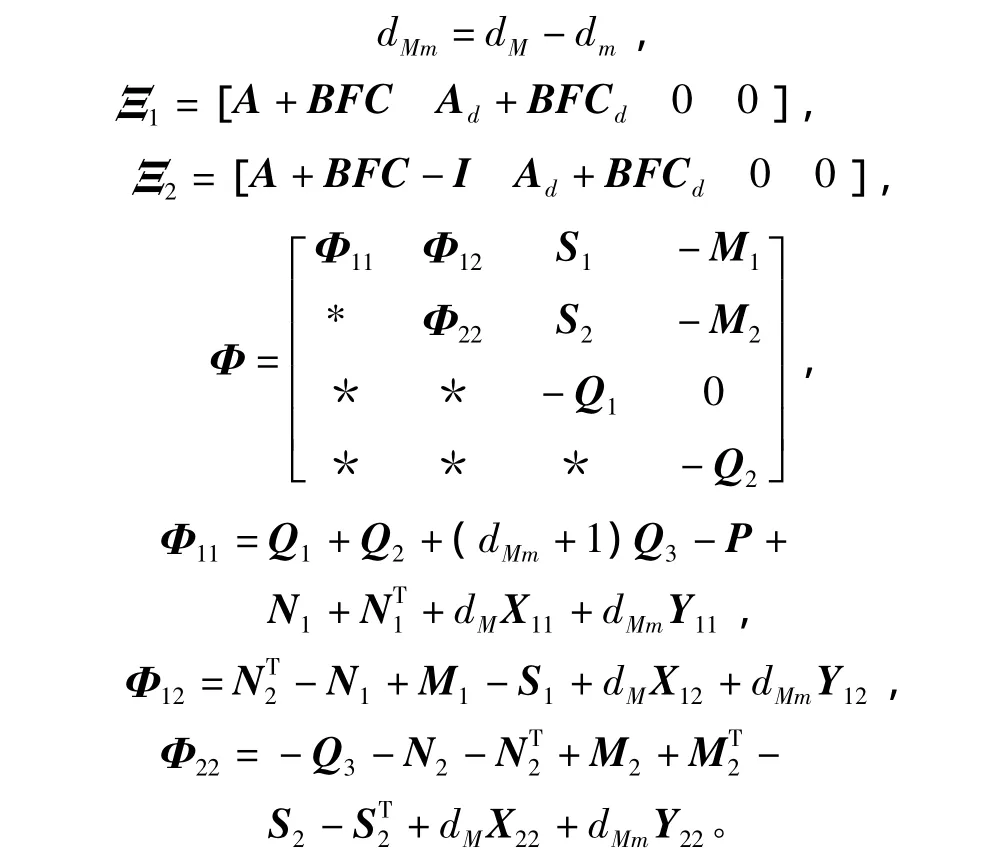
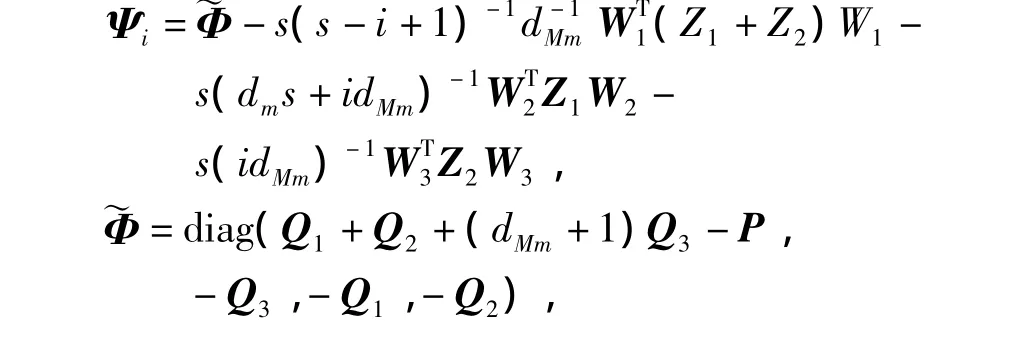
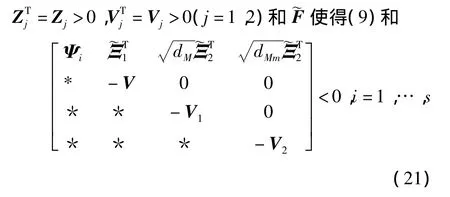
定理1对于给定的正整数s,dm和dM,dM>dm,系统(1)可由SOF控制器(2)镇定,如果存在矩阵P>0,V>0,Qi>0(i=1,2,3),Zj>0,Vj>0(j=1,2)和F使得(9)和
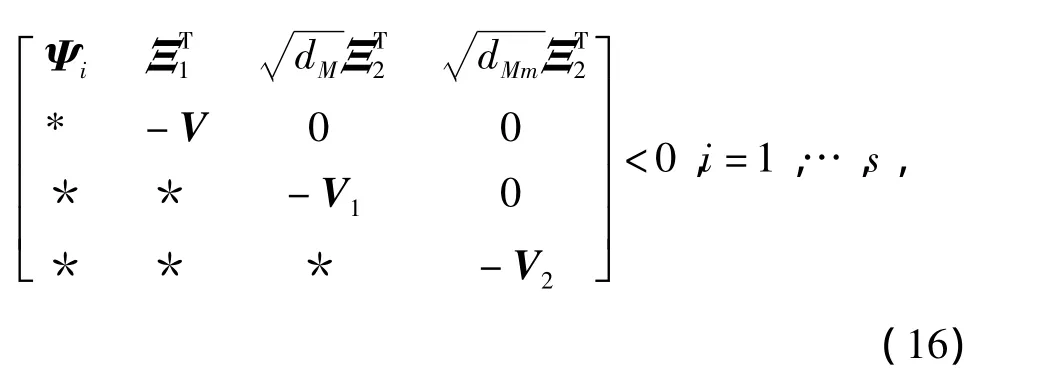
成立,其中dMm,Ξ1和Ξ2同引理1中定义,证

明 设 η(k)=x(k+1)-x(k),构造Lyapunov函数
进而利用Schur补引理,式(9)和(16)得ΔV(k)<0。从而系统(1)可由SOF控制器(2)镇定。证毕。
3.2 与文献中已有结论的比较
定理2对于给定的正整数dm和dM,dM>dm。在约束条件(9)下,如果线性矩阵不等式(6)~(8)成立,那么存在正整数s使得(16)成立。
证明 由式(6)、式(9)和Schur补引理得

于是存在正整数s使得

注意到Φ可以写成
利用Jensen不等式得到
如果d(k)位于第i个子区间,那么
i=1,…,s。再由(9)和Schur补引理知存在正整数s使得(16)成立。证毕。
注记1定理2的证明表明,当正整数s充分大时,定理1的保守性弱于[5]Theorem 2(即引理1)。
定理3对于给定的正整数dm和dM,dM>dm。如果式(10)、式(11)在约束条件(12)下成立,则当s=1时式(16)在约束条件(9)下成立。
证明 如果式(10)、式(11)在约束条件(12)下成立,则
其中W0=I2n[]0,,W1,W2和W3如定理1中定义。再使用式(7)、式(8)得到
其中W4=In[]0,Ξ1,Ξ2和W2如定理1中定义,

注记2定理3表明,当s=1时定理1的保守性弱于[3]Theorem 2。类似于定理3的证明,可推出定理1的保守性弱于[4]Theorems 6,7。
定理4对给定的正整数dm和dM,dM>dm。如果式(13)~式(15)成立,那么存在正整数s使得式(16)在约束条件(9)下成立。

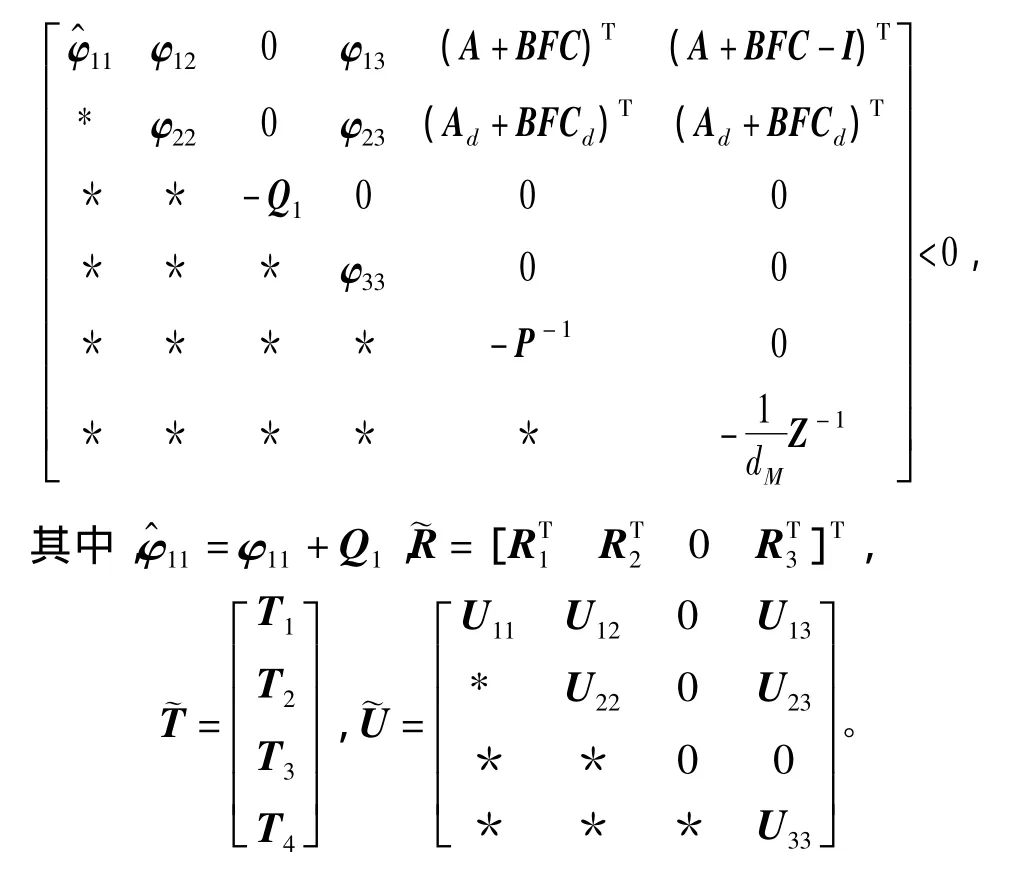
根据Schur补引理可推出

设Z1=Z,那么存在实对称正定矩阵Z2使得
注记3定理4表明定理1的保守性弱于[6]Theorem 3(即引理3)。
4 动态输出反馈镇定
类似于定理1的证明,下面的定理给出了系统(1)可通过DOF控制器(4)镇定的充分条件。
定理5对于给定的正整数s,dm和dM,dM>dm,系统(1)可由DOF控制器(4)镇定,如果存在矩阵PT=P>0,VT=V>0,=Qi>0(i=1,2,3),

dMm,Ψi,W1,W2,W3同前面定义。
5 数值算例
本节通过两个例子来说明本文所给出的方法的有效性。为了得到SOF和DOF增益矩阵,下面例子使用类似于文献[3—5]中的CCL算法在非线性约束(9)下求解式(16)和式(21)。
5.1 SOF镇定算例1
考虑系统(1),其中
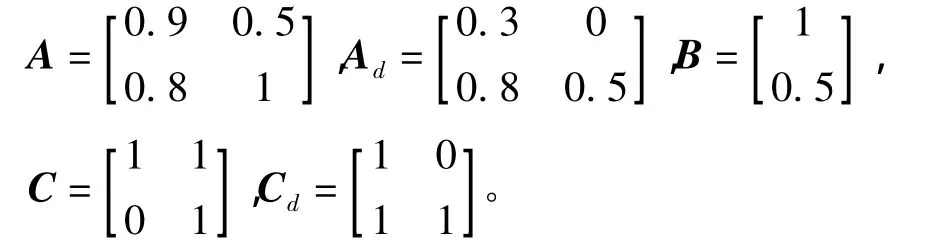
表1给出了由文献[3-6]中结论与定理1得到的dM的最大值。仿真结果表明定理1比文献[3-6]中的相应结论有较弱的保守性。另一方面,定理1所要求解的变量个数少于[5]Theorem 2和[6]Theorem 3要求解的,这降低了计算的复杂性。当s=15时,由定理1得到的SOF增益矩阵为F=[-0.349 0-0.193 1]。
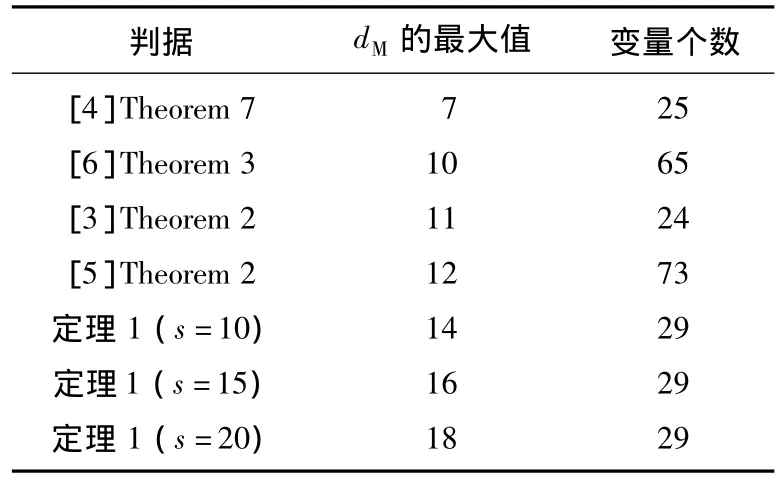
表1 当dM=3时,dM的最大值Table 1 Maximums of dMwhen dm=3
5.2 SOF镇定算例2
考虑系统(1),其中
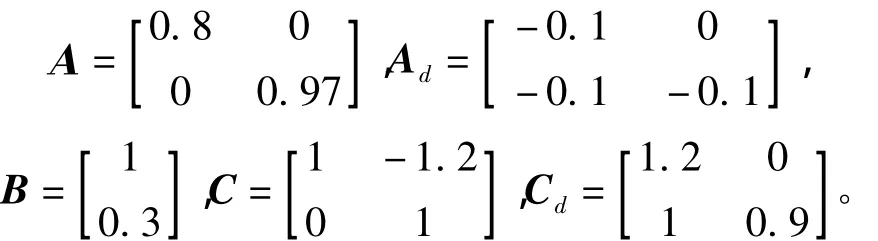
表2给出了由文献[3-5]与定理5得到的dM的最大值。由此可知,定理5的保守性弱于[3-5]中的相应结论。当s=10,r=2时,由定理5得到的DOF增益矩阵为
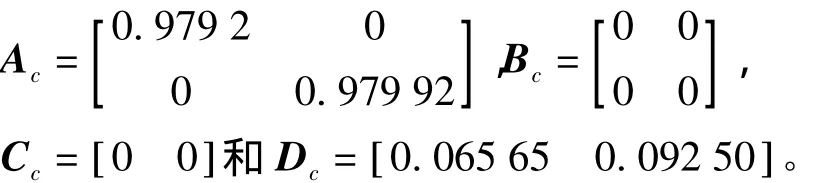
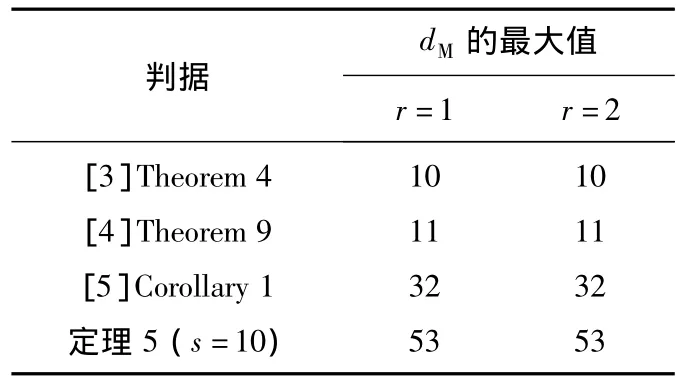
表2 当dm=3时,dM的最大值Table 2 Maximums of dMwhen dm=3
6 结语
本文研究了含区间时变时滞的离散线性系统(1)的SOF和DOF镇定问题。像引言中提到的,一些学者已经研究了该问题,通过构建Lyapunov函数和利用Jensen不等式技术,本文给出了系统(1)可通过SOF和DOF镇定的充分条件,并使用CCL算法求解输出反馈增益矩阵。通过理论的和数值的比较说明了本文所给出的方法的保守性弱于以往学者们所提出的。然而,由于CCL算法有时会失效,还需要进一步寻找求解有非线性约束的线性矩阵不等式的方法。另外,本文的思想和方法可用来解决某些更加复杂系统的镇定问题,例如具有各种不确定性的离散时滞系统等。
[1]XIONG Junlin,LAM J.Stabilization of linear systems over networks with bounded packet loss[J].Automatica,2007,43(1):80-87.
[2]GAO Huijun,CHEN Tongwen.Network-based H∞output tracking control[J].IEEE Transactions on Automatic Control,2008,53(3):655-667.
[3]GAO H,LAM J,WANG C,et al.Delay-dependent output-feedback stabilisation of discrete-time systems with time-varying state delay[J].IET Control Theory and Applications,2004,151(6):691-698.
[4]LIU X G,MARTIN R R,WU M,et al.Delay-dependent robust stabilisation of discrete-time systems with time-varying delay[J].IET Control Theory and Applications,2006,153(6):689-702.
[5]HE Yong,WU Min,LIU Guoping,et al.Output feedback stabilization for a discrete-time system with a time-varying delay[J].IEEE Transactions on Automatic Control,2008,53(10):2372-2377.
[6]CHEN K F,FONG I K.Stability analysis and output-feedback stabilisation of discrete-time systems with an interval time-varying state delay[J].IET Control Theory and Applications,2010,4(4):563-72.
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29
数学物理学报(2020年5期)2020-11-26
中等数学(2019年8期)2019-11-25
自动化学报(2019年6期)2019-07-23
北方工业大学学报(2019年5期)2019-03-30
中学数学研究(广东)(2018年13期)2018-08-11
中等数学(2018年12期)2018-02-16
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
广东石油化工学院学报(2016年6期)2016-05-17