
长基线系统应答器回收导引软件开发*
2013-11-23 04:18
舰船电子工程 2013年5期
(91388部队 湛江 524022)
1 引言
长基线水声定位导航系统[1]是水下目标试验必备的测量设备。但是试验过程中在回收应答器时,应答器是否在原校准点位或应答器上浮后未能及时发现,都将会发生应答器丢失的安全隐患。开发本软件,根据长基线潜艇导航系统测阵的原理,实时解算出待回收应答器的点位或运动轨迹,并给出包括工作母船位置、航迹、航速、应答器预定回收点、再校准后位置等回收态势图,引导测量船完成应答器的回收工作,将大大降低应答器丢失的风险。
2 测阵原理
带DGPS接收机的工作母船在海底应答器斜上方海面按预定航路匀速航行并记录轨迹,同时周期性的向海底应答器基阵发射询问声脉冲,通过测量声信号在母船和应答器之间的双程传播时延Ti,采用椭球面交汇算法即可确定应答器的位置[2]。设有效测阵脉冲个数为N,母船以航速(vx,vy)沿航路航行(如图1),得定位方程组[3]:

式(1)中:i为有效测阵脉冲序号;(xi,yi,zi)为第i个应答器的空间位置;Ti为目标到应答器i之间的声双程传播时延;C为平均声速;Tdi=T0i+T1+Ti,Tdi是水声收发机发出询问声脉冲到接收到第i个应答器的应答声脉冲为止的总时延,T0i为第i号应答器的电路延时,T1为水声收发机的电路延时(T0i、T1试验前可通过计量测得)。
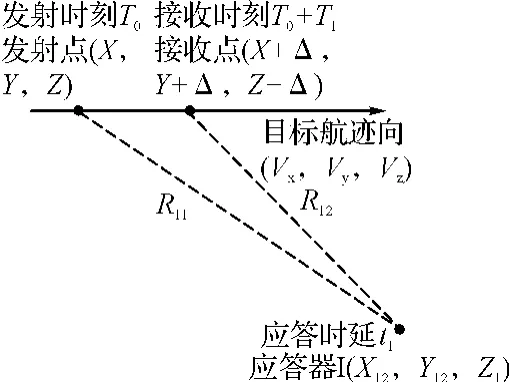
图1 长基线导航定位原理示意图
母船在多个位置测量,并记录该位置坐标和水声收发机所测距离,即对于任何一个应答器都可如式(1)建立相应的定位方程,一般来说,联立三个方程就可以解得应答器(xi,yi,zi)的精确位置。
3 算法模型
3.1 最速下降法迭代模型[4~6]
水声收发机发出询问声脉冲时刻母船到应答器的距离Rik,即得到下列式(2)所示的等效球面交汇方程组:


(x,y,z)为发出测距询问声脉冲时刻母船的位置。
先选取一组初值(x0,y0,z0),按最快收敛的方向进行迭代计算,以“失败—成功”法求最佳步长,从而直指最优解,得到满足一定精度要求的目标坐标。迭代计算数学模型为
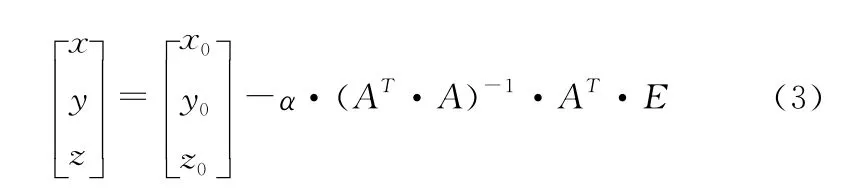
式中,(x,y,z)为本次迭代计算定位点的坐标,(x0,y0,z0)为前次迭代计算点的坐标,α为探索步长。
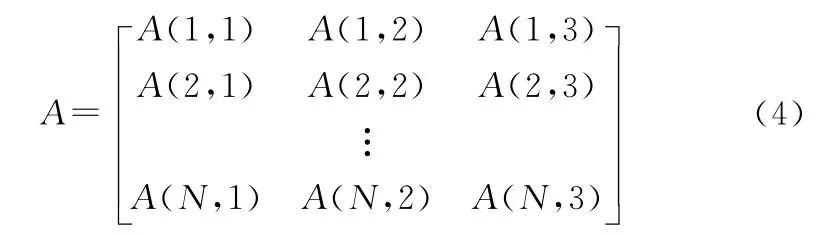
N为有效应答器数目。
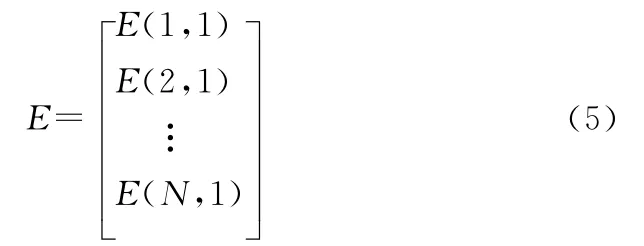
在式(4),(5)中
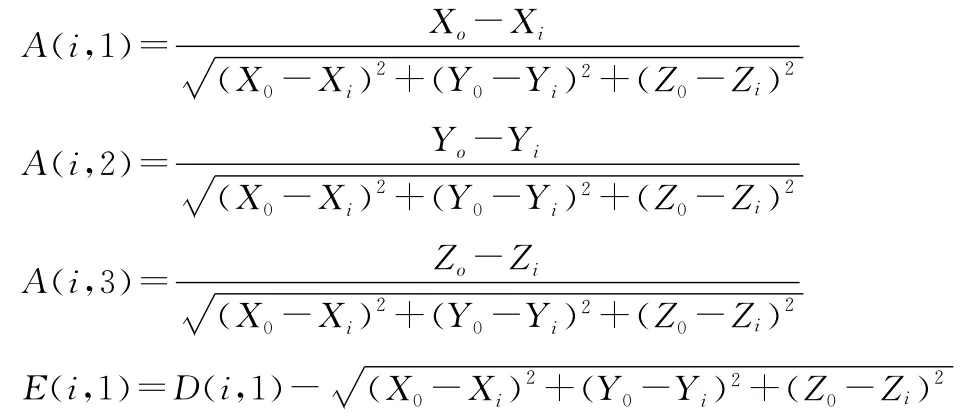
其中(Xi,Yi,Zi)为应答器i坐标,D(i,1)=Rik,母船到应答器i的距离。
均方误差为

在程序中,式(3)的迭代计算不是无限的迭代计算下去,一般选用几次迭代就可满足测量定位要求[8]。
3.2 脉冲挑选[7~8]
为有效的从带有脉冲干扰的脉冲序列中挑选出测距信号的直达声,需对脉冲序列结构和特征的分析,建立一系列判据,根据这些判据为每一个有效脉冲评定品质因数,然后依据品质因数选出最优脉冲参与解算。
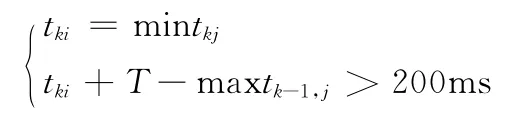
设每个阵元记录了最多m个脉冲的信息传给计算机,设Qai为直达脉冲品质因数,记f0为信号载频,tki为第k帧收到的第i个脉冲信号的时延值,tk-1表示上个周期选出的最优脉冲,Ti表示脉冲的脉宽,则评定品质因数的判据如下:
判据①:制保留每个脉冲群中的首脉冲,若某脉冲与前一脉冲的时延差大于200ms,即可认为属于另一脉冲群。
对于同一周期,当

对于相邻周期,当
时,令Qai=Qai+5。
判据②:由于信道的影响,声波的能量将逐渐衰减,一般情况下,直达声先于反射声到达,因而能量较大。
判据③:信道串漏脉冲和尖脉冲干扰的瞬时频率方差较大,增加方差小的脉冲的品种因数。
当Vki>Vmax时,令Qai=0。
判据④:以最高航速估算,接收到的脉冲信号多普勒Δf在一定范围内。当时,令Qai=Qai-4。
判据⑤:直达声的脉宽不会过于小。
当Tki<Tmin时,令Qai=Qai-4。
判据⑥:比较当前脉冲与其它通道所有脉冲的时延,若其差值接近于0,则幅度小的脉冲的品质因数置0。如果幅度接近,则脉宽小的脉冲的品质因数置0。
当目标位于两阵元中点时,理想情况下,其时延也应该相等,应用判据⑥必然会产生误判[9]。在实际应用中,可以忽略这种误判,原因是目标位于这种特殊位置点的概率很小,而且即使发生这种情况,可利用冗余阵元参加定位解算。
判据⑦:由于目标是运动的,如果是直达脉冲,则在相邻周期一定的时延差内必定存在与之对应的脉冲,也就是时延的连续性。为此,我们将本帧的每个脉冲与上一帧的选出的脉冲相比,判断其差值是否在一周期目标所能航行的最大距离范围内。
4 误差分析
对软件算法模型及实际环境分析可知,软件误差主要受以下因素的影响[10]:
1)系统误差。系统本身的电路时延造成的,通过计量得到其时延值,在解算中消减。
2)GPS定位误差。由于DGPS本身的定位精度造成的偏差,这里主要表现在监测浮标的GPS位置数据上。实际应用中,我们将其当作真实值来参与解算,但其误差存在必然性对定位的准确度造成的影响是不可忽略的,因此选用高精度的DGPS成为降低该误差的一种途径。
3)测时误差。测距仪通过测量“询问-应答”时间与平均声速的乘积得到母船与应答器的距离,测时误差的影响取决于应答器到两测量点的距离差与测量点间距之比。
4)声速装订误差。由于水文条件的影响,且海洋环境的不确定性,参与计算的声速值是一个折算后的平均值,由于声速贯穿整个测量和解算的过程,故其精度对整个导引软件定位精度都有影响。
5 实验室功能性测试和验证
在实验室读取海上试验数据,装订当时试验时声速、应答器延时、声头深度、测阵后待回收应答器经纬度及深度值,对软件进行公正性测试,运行图如图2,图中显示了待回收应答器实时解算位置及运动轨迹,工作母船当前位置及轨迹,并以图表形式实时显示斜距值,在列表中显示工作母船和待回收应答器当前及历史经纬度值、斜距值及航速。
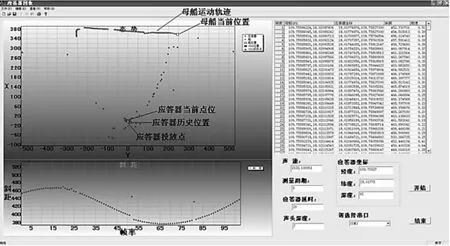
图2 应答器回收导引软件运行图
6 结语
通过实验室功能性测试和验证,本软件能够实现实时解算并显示出当前应答器位置及斜距值,同时在界面上还显示工作母船当前位置及运动轨迹、航速应答器运动轨迹,用列表的形式显示母船、应答器经纬度坐标、母船航速及斜距值并保存文件以备后期处理,可以完成应答器回收导引的功能。
[1]吴永亭,周兴华,杨龙.水下声学定位系统及其应用[J].海洋测绘,2003:18-2.
[2]王先华.长基线水下导航定位系统测阵校阵及系统集成[D].哈尔滨:哈尔滨工程大学硕士学位论文,2004:35-38.
[3]李莉.长基线阵测阵校阵技术研究[D].哈尔滨:哈尔滨工程大学硕士学位论文,2007:44-48.
[4]陈晓忠,梁国龙,等.非同步水声定位技术及其性能评价[J].声学学报,2003,28(4):358-360.
[5]封金星,丁士圻,惠俊英.水下运动目标长基线定位解算研究[J].声学学报,1996,18(5):22-23.
[6]于平.两种水声导航定位算法的应用与分析[J].靶场试验与管理,2004,1:15-18.
[7]于平,吴波,谢胜.水声定位信号脉冲挑选方法[J].舰船电子工程,2012,32(2):123.
[8]王正明,易东云,等.测量数据建模与参数估计[M].国防科技大学出版社,1996:158-159.
[9]惠娟.水下多目标跟踪定位算法研究[D].哈尔滨:哈尔滨工程大学硕士学位论文,2004:8-18.
[10]刘百峰,杨志权,赵珩.一种适用长基线系统绝对测阵的新航路[J].舰船电子工程,2011,31(6):173.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
广东教学报·教育综合(2022年45期)2022-05-05
铁路通信信号工程技术(2021年12期)2021-12-31
铁道通信信号(2020年9期)2020-02-06
船舶标准化工程师(2019年5期)2019-11-11
中国水运(2019年9期)2019-09-28
舰船电子工程(2018年11期)2018-11-26
电子制作(2017年19期)2017-02-02
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
航空学报(2015年4期)2015-05-07
