随机间歇测量多变量连续系统的均方可检测
2013-11-26 06:45沈志萍邬依林苏为洲
深圳大学学报(理工版) 2013年1期
沈志萍,邬依林,苏为洲
1)华南理工大学自动化科学与工程学院,广州510640;2)新乡学院数学与信息科学系,河南新乡453000;3)广东第二师范学院计算机科学系,广州510310
可检测性是线性控制理论的基本概念,与可镇定性对偶.近些年,许多学者将线性系统理论的基本概念,例如,能控性、能观性、可检测性和可镇定性等,扩展到随机系统,发现许多与确定性系统理论不同的新现象.这些现象揭示随机性系统和确定性系统的本质区别[1-6].Zhang 等[1-3,6]研究连续时间随机系统的可检测性、随机H2H∞控制、可镇定性和随机能观性等;Dragan等[4-5]研究随机控制的有理矩阵方程、随机小增益定理,从而将确定性系统相应理论推广至随机性系统理论中.
具有乘性噪声的随机不确定性系统的控制问题在航天、机械、化学化工、经济等领域中有着广泛应用[7];其研究也成为热点,Kleinman[8]和McLane[9]分别在概率1意义下及更强的渐近均方意义下稳定,给出具有状态乘性噪声的连续时间线性时不变随机系统稳定的充分必要条件;Willems等[10]用频域法给出连续和离散时间线性时不变单输入单输出随机乘性不确定系统均方稳定的充分必要条件;Hinrichsen等[11]讨论具有所谓“块对角”扰动的连续和离散时间随机不确定系统的鲁棒均方稳定和镇定问题.Stephen等[12]利用线性矩阵不等式的可行性来刻画随机不确定系统的鲁棒均方镇定,通过求解一个广义特征值问题获得系统的稳定性裕量.Yaz等[13]讨论具有随机参数的连续和离散时间不确定系统的均方镇定问题,给出各种均方可镇定条件.
最近蓬勃发展的网络化控制系统中,乘性噪声模型为描述信道特征,例如丢包[14-15]、量化误差[16-17]、衰退[18]、具有信噪比和带宽受限的约束[19]等方面提供了一种有效途径.Elia[20]等基于无误差数字信道,认为镇定网络不稳定系统所需比特率的紧下界,可用系统的不稳定度来表示;You等[21]基于有损信道,给出镇定网络不稳定系统的最小比特率与系统拓扑熵的关系;Elia等[16-17]给出单输入线性时不变系统二次镇定的最优量化密度和稳定度关系;Braslavsky等[19]基于信噪比约束信道,利用状态反馈,给出镇定单输入单输出网络系统的局限可用系统不稳定度或拓扑熵表示;Elia[18]进一步基于随机衰减信道,认为镇定单输入不稳定系统的最小均方容量可用系统的米勒测度来表示;Gu等[22-23]考虑在平行输入信道中具有扇形有界(衰减信道)时不变离散多输入系统的状态反馈均方可镇定问题,指出如果资源可以在平行信道中任意分配,则紧下界可用系统的拓扑熵表示.上述文献的共同特点在于被控系统中的不稳定度或拓扑熵是一个基本的局限,而与网络不确定模型没有直接的关系.
受以上研究及网络化多变量系统估计问题最新研究[24-25]启发,本研究讨论随机间歇测量下多变量连续时间系统的均方可检测问题,其中,将不可靠的随机间歇测量通道建模成具有伯努利分布的平行乘性噪声通道.当整个随机间歇测量通道的信噪比固定,且可以在各个随机间歇测量通道中任意分配时,指出为达到随机间歇测量多变量连续系统的均方可检测,存在一个用系统不稳定度表示的最小信噪比.
1 问题描述
考虑如下多变量线性时不变连续系统

其中,xt为系统状态;ut为控制输入;yt为测量输出,简记此系统为 (A,C),其不稳定度可用矩阵A∈Rn×n的不稳定度定义为

其中,λ1(A),λ2(A),…,λn(A)为A的特征值.图1为系统 (1)的结构示意图.

图1 随机间歇测量下多变量连续系统Fig.1 Multi-variable continuous systems with random intermittent measurement
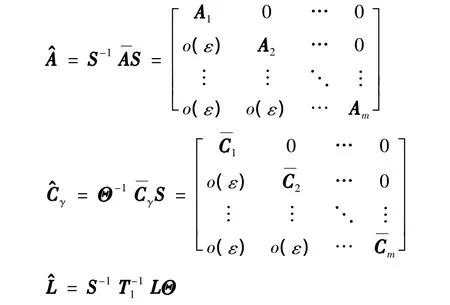
假设A不稳定,(A,C)可检测,C=[C1',C2',…,C'm]'行满秩.对于任意可检测对 (A,C),其 Wonham 分解[26]为
每对(Ai,Ci)是可检测的,Wonham分解后的系统矩阵没有固定形式.事实上,标准形式(2)已展现出系统(1)中每个输出通道的某些结构性质.
本研究用到的另一个线性坐标变换为

其中,T2为可逆的相似变换矩阵;As稳定;Au的所有极点不稳定;(Au,Cu)可检测.
针对随机间歇测量通道下的系统 (1),由于在t时刻估计器可以利用实际的测量信号γtyt和γt信息,故构造估计器

由式(1)和式(4),可得随机间歇测量下误差方程

在给出结论之前,先介绍如下定义和引理.
定义1[27]对于随机间歇测量通道下的系统(1),(A,C)称为均方可检测的,若
其中,随机间歇测量下系统 (1)下的测量为yt=γtCxt.
定义2[27]若存在L∈Rn×m使得随机间歇测量下误差方程(5)均方稳定,则称基于随机间歇测量通道γt的多变量系统 (A,C)是均方可检测的.
随机系统˙xt=h(xt,ξt),h(0,·)=0
其中,ξt为随机过程;h(·,·)=0为线性或非线性映射.该随机系统均方稳定的充分必要条件,为对任意给定的初始状态x0及t≥0,状态的二阶距Mt=E[xtx't]适定,且
引理1[28]以下各陈述是正确的
①矩阵Y=M×N可写成向量形式
vec(Y)=(N'⊗ M)vec(X).
②若A和B均为方阵,则tr(AB)=tr(BA).
问题:当测量信号为随机间歇测量,且系统为连续时间,有必要建立与文献[25]平行且对偶的结果,即随机间歇测量下多变量连续时间系统的均方可检测问题.
2 基于随机间歇测量的系统均方可检测性
研究线性系统测量信号具有随机间歇情况下的系统均方可检测性,对系统测量通道作如下假设.
假设1 在m个平行测量通道中,测量噪声γt为随机间歇乘性噪声,该噪声是具有伯努利分布的白噪声过程,γt结构为

其均值和方差分别为
记第i个随机间歇测量通道的信噪比 (signalto-noise,SNR)为gi= γ2i/σ2i,整个随机测量通道信噪比
假设2 通道信噪比{g1,g2,…,gm}可任意调整.
由于第i个通道的信噪比gi与其通道性质及所分配的资源相关,我们关心的是如何调整各个测量通道的信噪比,以保证系统是均方可检测的.
因推导需要,以下给出误差方程 (5)的两种不同表示形式.
在假设1前提下,误差方程 (5)可转换成伊藤随机微分方程形式[29]

其中,ωi(t)为标准标量维纳过程,i=1,2,…,m;Cγ= [γ1C'1,γ2C'2,…,γmC'm]'.
另外,误差方程 (5)的均方稳定可等价于如下系统的输出反馈均方可镇定
该系统等价于图2所描述的系统.
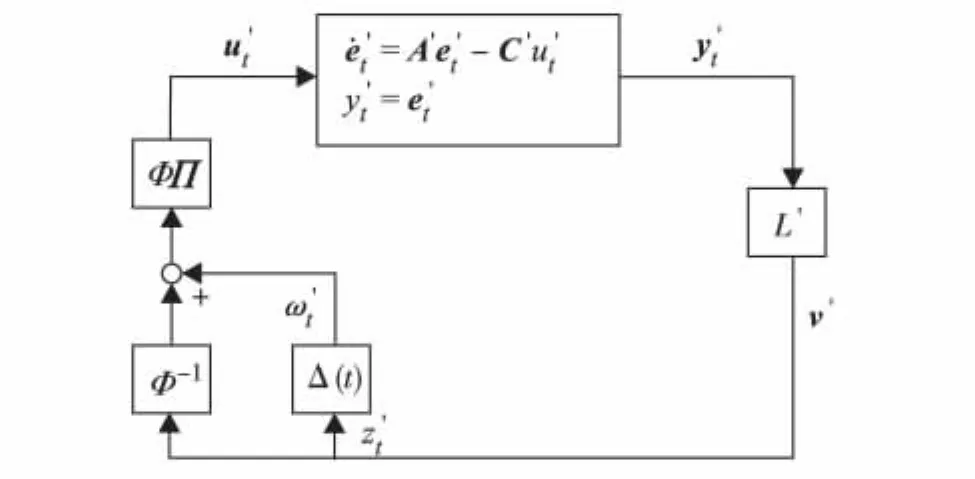
图2 误差方程的等价系统描述Fig.2 Equivalent description of the error
图2中,Δ(t)=diag{Δ1(t),Δ2(t),…,Δm(t)},Δi(t)≡ (γi(t)- γi)/σi,Π =diag{γ1,γ2, …, γm}, Φ = diag{σ1/γ1, σ2/γ2, …,σm/γm}.从图2可看出,若不考虑不稳定块Δ(t),wt到zt的传递函数为

给出本研究定理之前,先证明引理2.
引理2 在假设1和假设2的前提下,下面各条件等价
1)基于式(6)中γt的随机间歇测量通道下系统 (A,C)是均方可检测的.
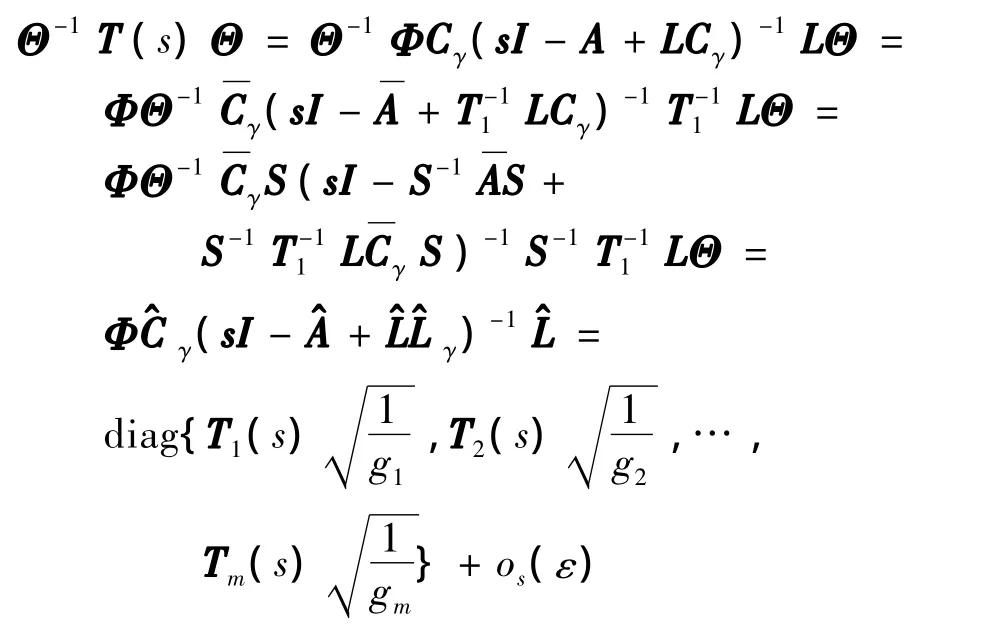
2)存在对角加权矩阵Θ∈Rm×m,使得

其中,T(s)的均方范数定义为

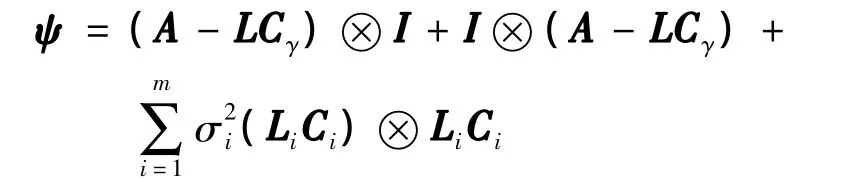
3)存在一个输出反馈增益矩阵L=[L1,L2,…,Lm]使得ψ是Hurwitz矩阵,即maxiRe{λi(ψ)}<0,其中,
4)存在正定矩阵P>0和反馈增益矩阵L=[L1,L2,…,Lm]使得

5)存在正定矩阵P>0,则

此时,可取输出反馈增益为L=LM=J-1cCγP.
6)基于式(6)中γt的随机间歇测量通道下系统(Au,Cu)是均方可检测的,Au和Cu定义见式(3).
【证】1)⇔2)可由文献[18]中定理6.4相应的连续时间结论得到.
1)⇔3)由定义2及式(7)伊藤公式可得
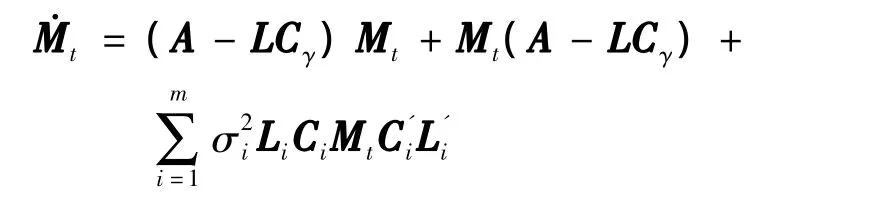
4)⇒1)引入线性李亚普诺夫函数,V(Mt)≡tr{MtP},则

鉴于式(10)和文献[31]中不等式(2.1b)关于迹的性质,有(Mt)<0,从而
3)⇒4)maxiRe{λi(ψ)} < 0,等价于 maxiRe{λi(ψT)}<0,初始条件Ω0>0,动态系统稳定,
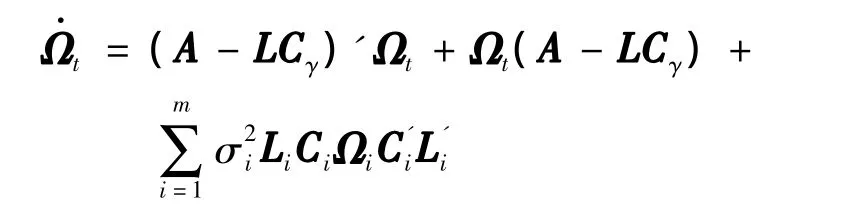
且当t→∞,vec(Ωt)指数趋于零.此时,对任意的适定且存在极限值P>0.对下式两边取极限t→+∞,可得P满足式(10).
其他证明类似文献[23]中引理2.证毕.
基于引理2,下面定理给出随机间歇测量下,系统(1)均方可检测时,整个随机间歇测量通道信噪比和系统矩阵不稳定度所需满足的关系.
定理1 在假设1和假设2的前提下,存在一个测量资源分配{g1,g2,…,gm},使得基于式(6)中γt的随机间歇测量通道下,系统(1)均方可检测的充分必要条件是

【证】 鉴于引理2中条件①和⑥等价,不失一般性,假设A的所有特征值均位于复数域中右半平面.
必要性证明.式(11)等价于

对式(13)两边同时取迹,有
因此,可得g>2 DⅠ(A).
采用构造性思想证明其充分性.
与文献[22]类似,根据式(2),用相同的T1,可得(A,Cγ)的Wonham分解



可得

结 语
本研究探讨具有伯努利分布的白噪声过程的平行随机间歇测量通道多变量连续系统的均方可检测问题.当整个平行随机间歇测量通道信噪比可以在各个平行随机间歇测量通道中任意分配时,给出随机间歇测量多变量系统均方可检测的充要条件,该条件可用系统不稳定度来表示.
/References:
[1] Zhang W H,Chen B S.On stabilizability and exact observability of stochastic systems with their applications[J].Automatic,2004,40(1):87-94.
[2] Zhang W H,Feng J,Chen B S,et al.On spectral assignment and detectability of linear stochastic systems[C]//American Control Conference.Portland(USA):IEEE Press,2005:386-387.
[3] Zhang W H,Zhang H S,Chen B S.Stochastic H2H∞control with(X,U,V)-dependent noise [C]//The 44th IEEE Conference on Decision and Control,European Control Conference.Seville(Spain):IEEE Press,2005:7352-7357.
[4] Damm T.Rational Matrix Equations in Stochastic Control,Lecture Notes in Control and Information Sciences[M].Berlin:Springer Verlag Press,2004.
[5] Dragan V,Halanay A,Stoica A.A small gain theorem for linear stochastic systems[J].System and Control Letters,1997,30(5):243-251.
[6] Zhang W H,Zhang H S,Chen B S.Generalized Lyapunov equation approach to state-dependent stochastic stabilization/detectability criterion [J].IEEE Transactions on Automatic Control,2008,53(7):1630-1642.
[7] Wagenaar T J A,De Koning W L.Stability and stabilizability of chemical reactors modeled with stochastic parameters [J].International Journal of Control,1989,49(1):33-44.
[8] Kleinman D.On the stability of linear stochastic systems[J].IEEE Transactions on Automatic Control,1969,14(4):429-430.
[9] McLane P.Asymptotic stability of linear autonomous systems with state-dependent noise[J].IEEE Transactions on Automatic Control,1969,14(6):754-755.
[10] Willems J,Blankenship G.Frequency domain stability criteria for stochastic systems[J].IEEE Transactions on Automatic Control,1971,16(4):292-299.
[11] Hinrichsen D,Pritchard A J.Stability radii for systems with stochastic uncertainty and their optimization by output feedback[J].SIAM Journal on Control and Optimization,1996,34(6):1972-1998.
[12] Stephen B,Laurent E G,Eric F,et al.Linear Matrix Inequalities in System and Control Theory[M].Society for Industrial and Applied Mathematics,Philadelphia,1994.
[13] Yaz E.Feedback controllers for stochastic-parameter systems:relations among various stabilizability conditions[J].Optimal Control Applications and Methods,1988,9(3):325-332.
[14] Sinopoli B,Schenato L,Franceschetti M.Kalman filtering with intermittent observations[J].IEEE Transactions on Automatic Control,2004,49(9):1453-1464.
[15] Hu S,Yan W Y.Stability robustness of networked control systems with respect to packet loss [J].Automatica,2007,43(7):1243-1248.
[16] Elia N,Mitter S K.Stabilization of linear systems with limited information [J].IEEE Transactions on Automatic Control,2001,46(9):1384-1400.
[17] Fu M Y,Xie L H.The sector bound approach to quantized feedback control[J].IEEE Transactions on Automatic Control,2005,50(11):1698-1711.
[18] Elia N.Remote stabilization over fading channels[J].Systems& Control Letters,2005,54(3):237-249.
[19] Braslavsky J H,Middleton R H,Freudenberg J S.Feedback stabilization over signal-to-noise ratio constrained channels [J].IEEE Transactions on Automatic Control,2007,52(8):1391-1403.
[20] Elia N.When Bode meets Shannon:control-oriented feedback communication schemes[J].IEEE Transactions on Automatic Control,2004,49(9):1477-1488.
[21] You K Y,Xie L H.Minimum data rate for mean square stabilization of single input discrete systems over lossy channels[C]//The 7th International Conference on Control and Automation.Christchurch(New Zealand):IEEE Press,2009:1-6.
[22] Gu G,Qiu L.Networked stabilization of multi-input systems with channel resource allocation[C] //The 17th IFAC World Congress.Seoul(South Korea):IEEE Press,2008:625-630.
[23] Xiao N,Xie L H,Qiu L.Mean square stabilization of multi input systems over stochastic multiplica-tive channels[C]//The 48th Conference on Decision and Control. Shanghai(China):IEEE Press, 2009:6893-6898.
[24] Rong B Y,Shi L,Qiu L.Networked state estimation of MIMO systems[C]//The 12th International conference on control,automation,robotics and vision.Guangzhou(China):IEEE Press,2012.
[25] Rong B Y,Shi L,Qiu L.State estimation over packetdropping channels[C]//20th international symposium on mathematical theory of networks and systems,Melbourne(Australia):IEEE Press,2012.
[26] Callier F M.Linear System Theory[M].New Jersey(USA):Springer-Verlag Press,2002:191-195.
[27] Damm T.On detectability of stochastic systems[J].Automatica,2007,43(5):928-933.
[28] Horn R,Johnson C.Matrix Analysis[M].Cambridge(England):Cambridge University Press,1985.
[29] Sun J Q,Stochastic Dynamics and Control[M].Newark:Elsevier Science,2006.
[30] Zhang W H,Xie L H.Interval stability and stabilization of linear stochastic systems[J].IEEE Transactions on Automatic Control,2009,54(4):810-815.
[31] Costa O L V,Fragoso M D,Marques R P.Discrete-Time Markov Jump Linear Systems[M].Spinger Verlag Press,2004.
猜你喜欢
小主人报(2022年8期)2022-08-18
宇航计测技术(2021年3期)2021-08-17
小资CHIC!ELEGANCE(2021年25期)2021-07-29
今日中国·法文版(2020年7期)2020-07-04
中国篆刻(2019年6期)2019-06-25
系统工程与电子技术(2016年4期)2016-08-24
电测与仪表(2016年12期)2016-04-11
橡胶工业(2015年2期)2015-07-29
电力建设(2015年2期)2015-07-12
深圳大学学报(理工版)(2015年5期)2015-02-28