
结合机载激光雷达技术的航摄数码相机检校分析应用研究
2013-11-29 07:49杨莉
铁道勘察 2013年3期
杨 莉
(中铁第四勘察设计院集团有限公司,湖北武汉 430063)
普通数码相机以其廉价、灵活、快速地特点在工程中得到愈来愈广泛的应用。近些年,机载激光雷达技术设备同时携带相机获取对应地区影像的应用也越来越多。但由于数码相机属非量测型相机,通常其内方位元素无法直接测定,并且存在较大的光学畸变差,因此数码相机的检验是近景摄影测量中经常碰到的问题,是数码航空摄影测量的一项基础性工作。
1 检校原理及重要性
数码相机的误差主要有镜头引起的误差和CCD引起的误差。镜头引起的误差是由相机物镜系统设计、制作和装配误差引起的像点偏离其正确位置的误差,主要是指光学畸变差,具体包括径向畸变差和偏心畸变差。CCD引起的误差主要有CCD安置、CCD阵面不平整和CCD面阵内变形引起的误差,通常情况下经出场检验合格后,这个值影响很小,可忽略不计。
结合相机出场配套的相机文件,可采用基于摄影测量原理的试验场检校法来完成相机的检校。其原理是用相机拍摄检校场,而检校场标志点其空间坐标可量测获得,依据单片后方交会或多片后方交会,可解求相机内方位元素和畸变参数。
2 检校场准备工作
(1)飞行之前做好完善的飞行计划。
飞行参数及计划:飞行航高、测区覆盖范围(大约3 km×2 km)、选择航向和旁向覆盖率、飞行航线(垂直/反向飞行四条航线,每天航线至少12张影像)、航向重叠度、航线之间旁向重叠度(航向80%)。具体参数可参看航飞设计。
(2)地面控制点(建议15~20个),分布规律如下:测区的四个角的区域布设1~3个控制点,中心点布设1-3个控制点,此控制点作为精度检查的检查点使用。
3 相机检校流程
航飞完成后开始相机检校,相机数据检校在收集好相关资料后,即可进行。
(1)相关资料收集
采用经审批通过后的相机检校场数据,其中包括检校场原始影像、初始影像外方位元素数据、航迹文件、像控点坐标以及点志记等等相关文件。
依据仪器要求及相关工作经验,相机检校工作推荐在WGS84坐标系下进行。
(2)相机检校作业过程
结合工程生产,相机检校使用徕卡公司的相关软件,主要工作流程可描述如下:
①利用相机事件文件(Event)和.SOL文件生成影像的初始外方位元素。
②建立影像工程,并利用相机检校文件,进行内定向和外定向。
③在对应的加密模块下进行空三加密处理。
④利用空三加密结果,生成相机的视准轴检校值,并重新生成检校后的外方位元素(如图1所示)。
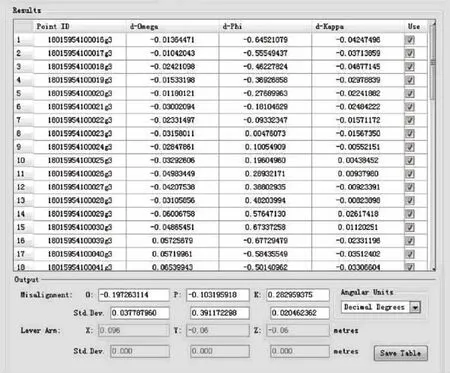
图1 获取Misalignment(视准轴)检校值
⑤重新建立工程采用检校值,对检校结果进行精度检查和分析。
4 相机检校成果
完成相机检校后,即可得到 Misalignment(视准轴)检校值,按照数据生成流程,可将该检校值应用于测区影像数据,此时可针对测区需要选择相应的坐标系,生成影像必需的外方位元素。
5 成果质量检查
关于相机检校的成果数据的质量检查,可从软件和检查点两个方面进行。
(1)完成相机检校后,将得到的Misalignment(视准轴)检校值应用于影像数据,此时再建立工程,检查数据看是否起到检校作用(如图2、图3所示)。
(2)在相机检校区,可采用外业采集的多个地面控制点做检查。均匀分布在测区的四个边角和中心区域,经过后处理检校之后,检查计算控制点中误(如图4、表1所示)。

表1 检校后的地面控制点中误差
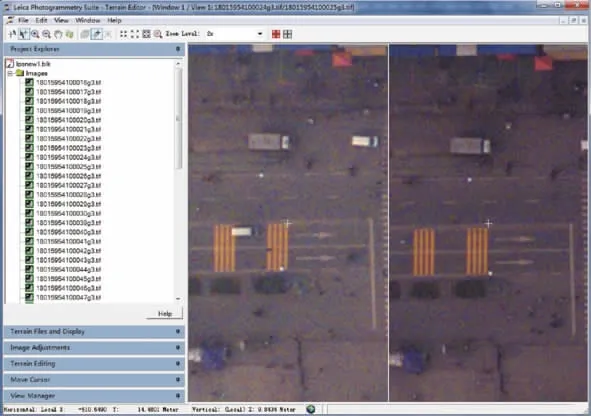
图2 检校前LPS立体像对左右片上同名地物点十字叉位置
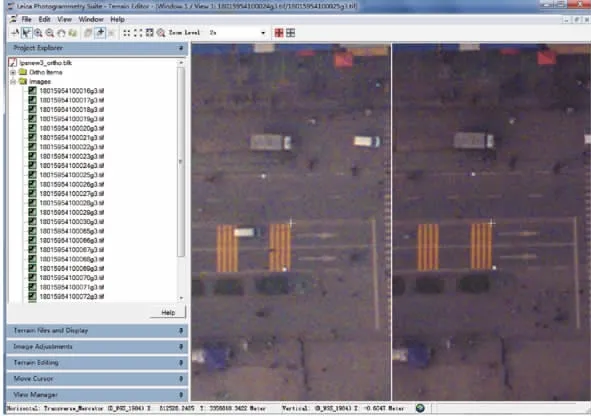
图3 检校后LPS立体像对左右片上同名地物点十字叉位置
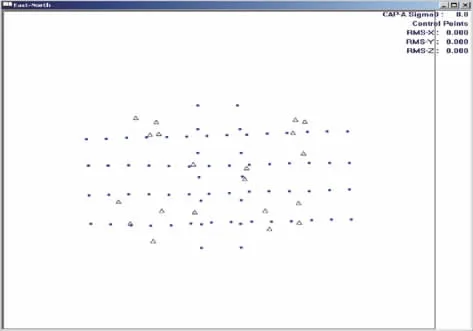
图4 相机检校地面控制点分布图
检校后的平面误差在1~2个像元,高程误差在1个像元左右,检校结果符合相机检校规范,相机经过检校之后所能达到的精度可以满足常规正射影像产品的精度要求。计算得到的视准轴偏差值可作为后续数据处理采用。
(3)类似检校场数据,可采用控制点或者检查点等相关信息,做中误差统计分析。同时还可以结合点云数据,将影像和点云数据进行叠合,检查影像质量。根据相机检校成果进行正射影像制作,套合检校场激光点云数据(如图5图6所示)。
图5 影像与点云数据叠合效果图(一)

图6 影像与点云数据叠合效果图(二)
[1]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007
[2]郑炎兵,区意金.数码相机检验中出现的问题及解决方法[J].地理空间信息,2009(3)
[3]基于DLT模型的一种数码相机检校方法[EB/OL],http://wenku.baidu.comview5b27e1dcd15abe23482f4dae.html.
[4]邱志成.现代科技发展对摄影测量与遥感技术的影响[J].测绘科学,1999(3)
[5]李艺,林宗坚,李佶,等.非量测数码相机单像空间后方交会的辅助分步像主距与像主点的简单测定[J].测绘科学,2009(2)
[6]何敏,全斌.几种相机检校方法的探讨[J].测绘与空间地理信息,2011(6)
[7]高帅华,张继斌.数码相机检校方法总结[J].城市建设理论研究,2012(24)
[8]郭学林.普通数码相机检校方法的研究[J].安徽农学通报,2007,13(19)
[9]张祖勋,等.数字摄影测量学[M].武汉:武汉大学出版社,1997
[10]邹勇平.POS辅助航空摄影测量应用方法研究与误差分析[D].西安:西安电子科技大学,2010
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
科学大众(2020年23期)2021-01-18
中国铁道科学(2019年5期)2019-10-19
测绘通报(2019年4期)2019-05-10
同济大学学报(自然科学版)(2018年11期)2018-12-04
测绘通报(2018年10期)2018-11-02
小学阅读指南·低年级版(2017年12期)2017-12-26
传媒评论(2017年2期)2017-06-01
传媒评论(2017年2期)2017-06-01
