
基于元胞自动机的烟幕成像模型建模方法
2013-12-01 02:12陆斌,谭伟
探测与控制学报 2013年4期
陆 斌,谭 伟
(1.海军航空工程学院控制工程系,山东 烟台 264001;2.解放军92853部队,辽宁 兴城 125106)
0 引言
烟幕作为对抗成像探测、制导武器的一种应用广泛的无源干扰手段,具有成本低、战术使用简易方便等特点。烟幕受多种因素的影响,一旦释放难以控制。因此烟幕武器的研制离不开理论的指导和科学的试验,及相应的测试和评估,它能够确保装备的性能和质量及实战使用中发挥最大的潜能[1]。
当然,利用大量外场试验来验证烟幕对成像制导武器的干扰效果需要付出人力、物力代价,同时由于外场烟幕试验受到多种不可控因素的影响,会导致试验效率不高,而单纯的室内试验又缺乏足够的依据,目前比较科学的方法是综合野外、半实物和实验室的试验方法[2],同时利用仿真技术是缩短系统研发鉴定周期、成本的主要手段。
目前烟幕建模根据其出现与规模发展的时间依次主要有粒子系统模型、流体力学模型、分形技术模型等方法,粒子模型方法有较强的三维细节表现力,流体力学模型有较强的扩散、流动规则控制,而分形技术模型有较强的相似物质生成过程的运算量简化能力[3]。同时随着对仿真对象要求的提高这些方法在使用过程中也暴露其不足,当粒子系统模型的粒子数量增大时或流体力学模型方向性控制复杂时易受到算法实时性的限制,而分形技术模型则对于仿真对象的细节复杂变化不具备优势。
因此,本文针对成像跟踪视景仿真中烟幕的仿真细节与实时性兼顾的问题,提出了基于元胞自动机理论的烟幕模型建模方法为其成像仿真提供相关依据。
1 烟幕消光机理及影响因素
1.1 烟幕的消光机理
烟幕对辐射的衰减作用,具体表现为吸收和散射作用,反映在成像传感器的图像上即为灰度的变化和对探测目标的遮蔽影响[4],一般的烟幕的对辐射消光影响作用表示为[5]:

式中:I为受到烟幕影响后的辐射强度(W/sr);I0为受到烟幕影响前的辐射强度(W/sr);α0为烟幕遮蔽物的消光系数(m2/g);为形成的烟幕浓度(g/m3);l为烟幕的传输距离(m)。
1.2 影响烟幕构成的自身及外部因素
作为复杂的粒子系统,烟幕的自身构成受许多因素的影响,包括自身粒子特性和动力学特性[6]。
粒子特性主要包括:烟幕粒子的形状,烟幕粒子的特征尺寸,烟幕粒子尺寸的分布函数。烟幕的动力学特征主要包括:烟幕粒子的蒸发与凝并;烟幕粒子的沉降与沉积,包括单一粒子的重力沉降和粒子群的沉降。烟幕外部影响因素主要有释放因素和环境条件。释放因素包括烟幕释放器材、释放约束条件等;环境条件包括释放环境气象条件(风力场)、环境构成、探测器与烟幕及环境的配置等。
1.3 对烟幕模型计算的基本工程经验简化
烟幕的研究和使用经过几十年的发展,通过大量的工程试验和理论验证,已经能够为一般典型的烟幕类型提供一些工程计算的简化依据,使得对烟幕的模型简化具备了理论和实践的基础,可以体现在下面几个方面:
1)烟幕粒子形状与大小方面的简化;
2)烟幕粒子消光作用类型简化;
3)对指定烟幕类型和波段相应简化。
1.4 元胞自动机模型
元胞自动机则是20世纪90年代开始逐步开始广泛应用的适用于复杂、混沌系统技术,利用确定的、离散的状态、针对性的规则描述复杂的系统[7]。元胞自动机立足于用确定的、离散的状态、针对性的规则描述复杂的系统[8]。
元胞自动机(Cellular automatan简称CA)是定义在一个由具有离散、有限状态的元胞组成的元胞空间上,按照一定的局部规则,在离散的时间维度上演化的动力系统,如图1所示。元胞自动机包括元胞空间、元胞及其状态、邻居、形成扩散及相互影响规则和影响因素,而每个元胞单元以一定的规则受到相邻单元的影响[9]。
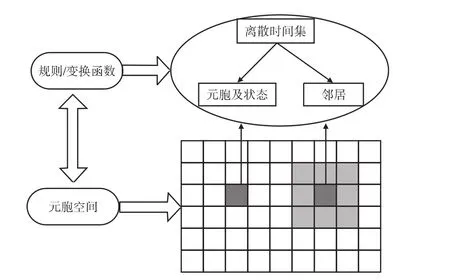
图1 元胞自动机模型Fig.1 Sketch map of cellular automata construction
2 基于元胞自动机的烟幕模型建模方法
烟幕是由空气和悬浮与空气中的固态或液体微粒组成的准稳定体系,因此符合元胞自动机的描述方式,而且具备元胞自动机的基本特征,即同质性、齐性、空间离散、时间离散、状态离散有限、并行性、时空局域性等。
基于元胞自动机的烟幕模型结构中的烟幕粒子、粒子空间、相邻粒子、粒子间相互作用分别代表了元胞自动机的基本组成单位的元胞、元胞空间、邻居及规则四个部分。对于基于元胞自动机的烟幕模型描述,可以通过上述1.3节的简化过程,把具体的烟幕模型以效能等效的原则进行构建,以性能简单而具体的粒子反映细节,以粒子间的相互影响规则构建群体的功能,以群体粒子的功能反映烟幕总体消光效能,这符合元胞自动机的基本原则,也为使用元胞自动机方法描述和建立复杂烟幕模型提供了依据和准则。
基于元胞自动机的烟幕模型把形成烟幕的空间划分为均匀的三维网格,每个网格作为元胞单元并具备基本的离散状态,主要组成要素包括元胞空间、元胞及自身状态、邻居、扩散与影响规则、外部影响条件等,该模型构建主要包括四个基本步骤:
1)确定基于元胞自动机的烟幕模型的元胞空间及其状态
基于元胞自动机的烟幕模型的元胞空间可定义为烟幕释放与扩散的范围,在此范围内划分的有限的、离散的空间的、每个空间只包括一个元胞的集合。基于元胞自动机的烟幕模型需要定义元胞、状态,这里以连续源扩散模型为例,综合烟幕粒子的形状、蒸发、沉降等方面的情况,定义粒子在烟幕模型中的扩散和消光能力为强(strong)、中(middle)、差(weak),对应每个元胞的基本状态为:States=2;Statem=1;Statew=0,以不同的灰度表示,如图2所示。每一级状态在时间序列上随机产生,代表了该粒子的对辐射的消光效果和向空间扩散的能力。不同的元胞状态对扩散方向上的元胞空间产生不同的影响,例如当烟幕施放的方向为z方向时,z方向的元胞空间中的元胞状态发生不同的变化,如式(2)所示。

2)构建基于元胞自动机的烟幕模型扩散规则
基于元胞自动机的烟幕模型扩散规则是表征烟幕元胞自动机扩散与发展的过程描述函数,扩散规则是元胞自动机的发展及相邻元胞之间相应影响的原则,对烟幕而言,表示了烟幕的产生、扩散等过程中烟幕的浓度变化、扩散方向、相应的光谱消光能力等。图3所示为每个不同状态元胞对扩散方向元胞空间中元胞的影响。
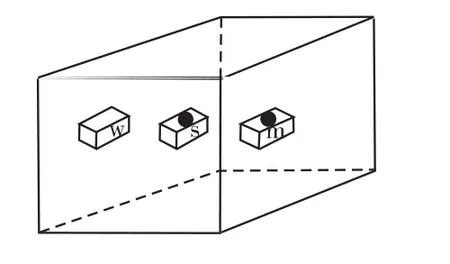
图2 元胞的三个基本状态Fig.2 Basic states of the cellular
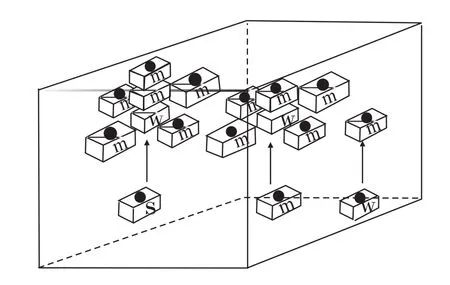
图3 元胞的三个基本扩散规则Fig.3 Basic expend rules of the cellular
3)构建基于元胞自动机的烟幕模型的邻居及相互影响规则
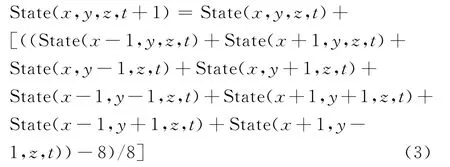
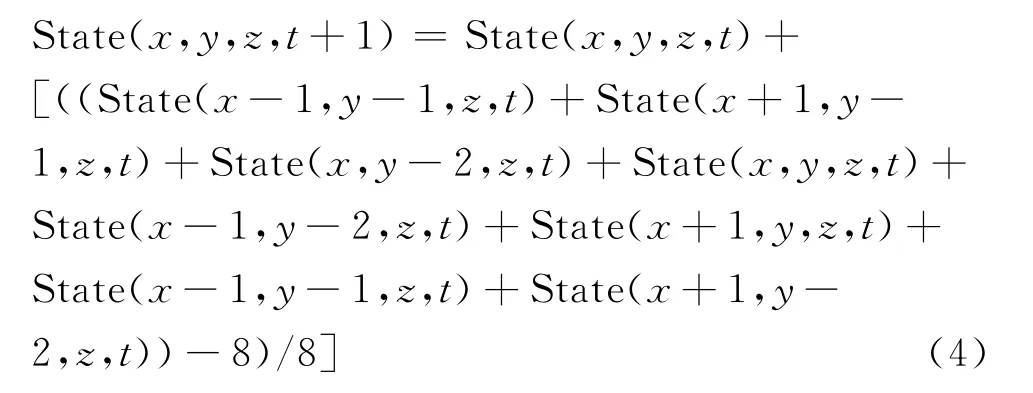
基于元胞自动机的烟幕模型的邻居由相互为邻域的元胞组成,每个元胞受到其相邻区域的邻居的影响。邻居的划分在一维元胞自动机中通常以半径来确定邻居,即距离一个元胞半径的范围内的所有元胞均为该元胞的邻居。烟幕的元胞自动机模型中每个元胞的状态受到相邻8个元胞的状态影响,把相邻元胞的均值经取整运算作为对中心元胞的影响值。例如当烟幕从地面向上空间扩散时,在t+1时刻每个位于元胞空间(x,y,z)处的元胞状态为
4)确定基于元胞自动机的烟幕模型的外部影响修正原则
基于元胞自动机的烟幕模型扩散规则需要考虑外部影响,当受到如环境中地貌、风向、施放指向等因素影响扩散方向时,其形成与扩散规则将根据风速的方向及与扩散速度的比率情况进行相应修正,如存在x方向的存在与扩散速度一致的风速时,在t+1时刻每个位于元胞空间(x,y,z)处的元胞状态为:
3 基于元胞自动机的烟幕成像模型建模方法的仿真验证
3.1 典型条件下元胞自动机的烟幕模型建模实例
结合野外试验的发烟条件,确定元胞自动机烟幕模型模拟野外试验中无风条件时发烟源烟幕扩散过程,时间为从发烟开始到基本形成烟幕的6s过程。
烟幕对成像探测器的影响反应在消光效应,对得到的图像反映在相关像素的灰度值变化,对烟幕形成与扩散的方面反映在形成的时间、扩散的速度、持续的时间、空间分布及变化,因此基于元胞自动机的烟幕扩散模型的各相关组成均需要与这些相关特性确定相应的对比关系,图4为元胞自动机元胞排列与实测烟幕灰度对应示意图。表1为典型扩散情况下元胞自动机组成与烟幕图像的对应关系。
基于元胞自动机的烟幕模型利用烟幕图像灰度与元胞自动机的实时元胞状态对应关系及式(2)、(3)、(4)的规则进行构建。

图4 元胞状态及排列与烟幕图像关系Fig.4 Relative layout between cellular to the smoke imager

表1 元胞自动机模型构建与烟幕图像的对应关系Tab.1 Relative characters between construction of cellular automata and smoke images
3.2 基于元胞自动机的烟幕模型的成像仿真
成像探测、跟踪、制导的图像为灰度图像,对于成像传感器而言,烟幕的消光与遮蔽作用反映在信号的体现就是灰度数值的变化,即成像面阵的各相关像素点的灰度值明暗及相互关系的变化[10]。透过烟幕成像的面阵与烟幕透过率的矩阵关系如下(假设成像面阵为m×n):

其中Dsm,n(x,y)为有烟幕情况下成像传感器得到的各像素点灰度值矩阵;Dm,n(x,y)为没有烟幕情况下成像传感器得到的各像素点灰度值矩阵;∂(m,n)为在成像传感器传输路径上各像素点烟幕透过率矩阵。
通过统计在某一时刻元胞自动机空间在视角传播方向上的元胞数量及状态分布情况,即把空间三维信息转化为相应的二维位置点出的烟幕浓度信息,可以得到其对辐射的透过率情况,根据透过率计算可以得到成像面阵的相应辐照度,相应的反映在成像像素即为灰度值,然后需要进行相应的量化,作为烟幕图像的依据,利用均匀量化的方法,辐照度与灰度呈线性关系。找出烟幕辐照度的最大值和最小值,找出烟幕辐照度的最大值和最小值,分别用Emax和Emin表示。计算每级灰度对应的辐射间隔:

Grange为灰度动态范围;计算点(x,y)处的辐照度对应的灰度值:

并以此形成烟幕图像各像素的灰度关系。图5表示了烟幕成像仿真的基本流程。
烟幕视景仿真程序采用C++Buider2007编程软件,该软件有代码兼容性好、开发周期短的特点,其前身是Borland C++的典型代表产品[11]。
目前,对于烟幕的评估尚无经典和权威的指标,在实际应用中烟幕仿真图像需要反映实际试验中的干扰效果的指标包括烟幕透过率空间分布及自身的相关性、相似度等,其中最重要的指标是透过率的空间分布,它直接反映了成像探测器得到的图像的灰度分布与变化规律。
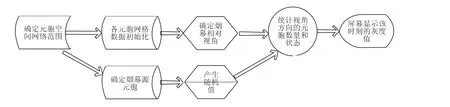
图5 烟幕仿真的基本流程Fig.5 The basic progress of smoke simulation
3.3 基于元胞自动机的烟幕模型成像仿真结果
图6为实测外场试验烟幕图像及仿真图像,(a)、(b)为野外试验中无风条件时发烟源烟幕扩散过程的第1.2s和2.1s时红外长波视频图像截图及其对应的灰度分布图;(c)、(d)为模拟该施放条件下源为(20×20点阵)面源进行到第30次和50次元胞扩散的情况。从仿真情况可以发现,元胞自动机的模型扩散与试验中的扩散趋势基本一致,但在某些不均匀细节上有明显差别,这是烟幕材料爆炸燃烧的不均匀性形成的重力造成的,这也是仿真无法完全替代试验的因素。
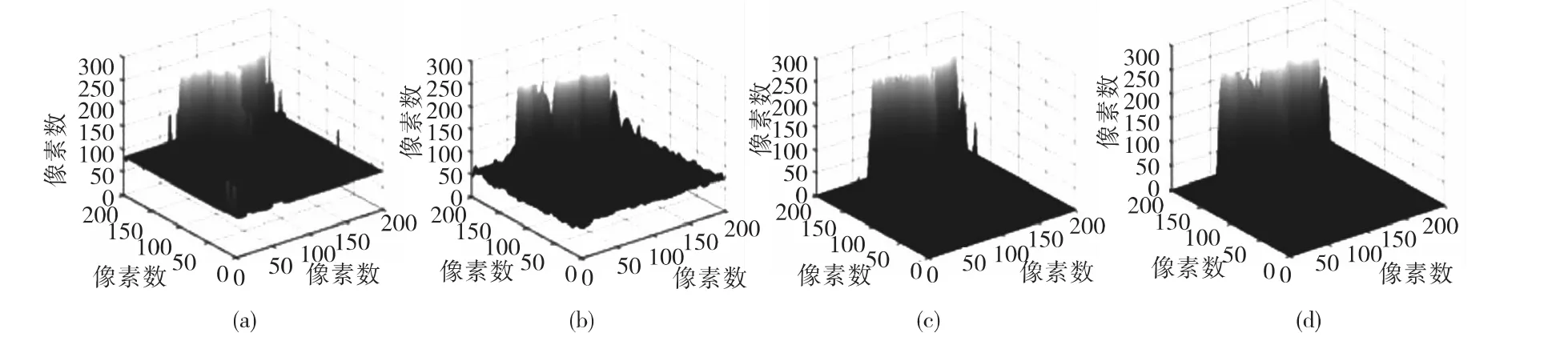
图6 外场试验实测烟幕仿真图像及其灰度分布图Fig.6 The images of simulation and the field testing with their imaging grey level distribution
基于元胞自动机的烟幕图像仿真,针对仿真细节与实时性的兼顾,根据具体烟幕类型的仿真对象,通过烟幕模型的形成与扩散规则的针对性确定,仿真细节可以具体到每个像素;在实时性方面,通过对仿真对象针对性的制定元胞状态,可以简化模型的复杂程度及运算量,实时性结果如表2所示。仿真结果表明该方法较好的兼顾了烟幕仿真细节与实时性,完全可以满足红外成像制导的视景仿真要求。
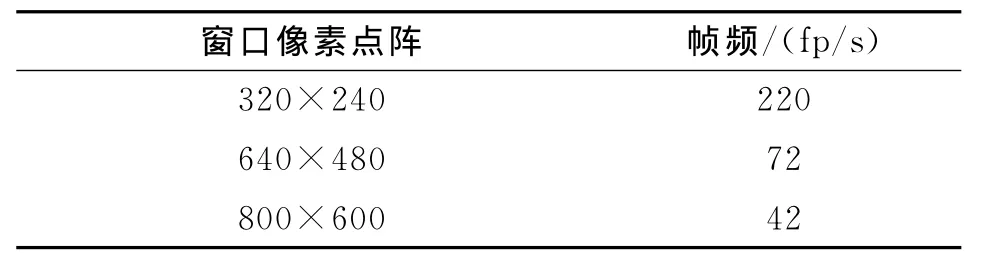
表2 仿真程序实现的不同窗口与帧频Tab.2 Different scene windows and their relative frame speed
仿真程序采用C++builder2007编程软件编写,PC 机基本配置为 AMD Athlon 2.11GHz,2 GB内存,NVIDIA GeForce 8500GT显卡。
4 结论
本文提出了基于元胞自动机的烟幕成像模型建模方法。该方法根据烟幕消光机理和试验数据确定模型中元胞的简化离散状态,利用确定的扩散方向、风向、环境对扩散的影响因素修正元胞自动机模型的扩散规则,根据与实际试验的图形图像素材对模型进行相应的规律修正,使其具备较高的可信度。动态视景仿真验证结果表明,以该方法建立的烟幕模型较好的兼顾了仿真细节与实时性的要求,一定程度地解决了粒子系统模型和流体力学模型建模方法中仿真复杂烟幕条件的实时性问题,和分形技术模型建模方法中烟幕细节复杂变化反映不充分的问题。该模型建模方法可以为成像跟踪装备的探测跟踪过程的烟幕成像仿真提供相关仿真建模依据(一般成像制导场景窗口为320×240,帧频约40帧)。同时,由于元胞自动机模型技术在烟幕领域的应用介绍目前很少,其邻居及相互影响及扩散规则、离散状态维数等方面,均有很大的研究空间。
[1]焦清介,霸书红.烟火辐射学[M].北京:国防工业出版社,2009.
[2]姚禄玖,高钧麟,肖凯涛,等.烟幕理论与测试技术[M].北京:国防工业出版社,2004.
[3]李宏宁,白廷柱.用于场景仿真的红外烟幕模型及其特性分析[J].系统仿真学报,2011,23(10):2248-2253.LI Hongning,BAI Tingzhu.Smoke model for infrared scene imaging simulation and characteristic analysis[J].Journal of System Simulatio,2011,23(10):2248-2253.
[4]陆斌.基于Vega的海天背景战场环境视景仿真[J].微计算机信息,2011,27(1):244-247.
[5]杜石明,曾凯,吕相银,等.对红外烟幕消光机理及性能的研究[J].电光与控制,2011,18(1):90-93.DU Shiming,ZENG Kai,LV Xiangyin,et al.Study on Extinction Mechanism and Performance of Infrared Smoke Screen[J].Electronics Optics &Control,2011,18(1):90-93.
[6]陆斌,吴轶男.红外烟幕干扰效能测量方法研究[J].红外,2012(5):27-31.LU Bin,WU Yinan.Measurement of disturbance performance of infrared smoke[J].Infrared,2012(5):27-31.
[7]姚海.基于元胞自动机的云层实时模拟[J].系统仿真学报,2008,20(11):2946-2950.YAO Hai.Real-time simulation of volumetric cloud on cellular automaton[J].Journal of System Simulation,2008,20(11):2946-2950.
[8]Nishita T,Dobashi Y.Modeling and rendering of various natural phenomena consisting of particles[C]//Proceedings of Computer Graphics International Conference,CGI.Hong Kong:IEEE,2001:149-156.
[9]贾斌,高自友.基于元胞自动机的交通系统建模与模拟[M].北京:科学出版社,2007.
[10]张涛.动态红外烟幕仿真方法研究[D].西安:西安电子科技大学,2010.
[11]C++builder2007programmer guide[EB/OL].[2012-02-11]www.codegear.com.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
合成材料老化与应用(2022年3期)2022-06-27
延边大学学报(自然科学版)(2021年2期)2021-07-29
合成纤维工业(2021年2期)2021-05-08
软件学报(2019年12期)2019-10-26
科技视界(2019年11期)2019-06-20
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
