
基于指数加权的改进衰减记忆自适应滤波算法
2013-12-01 02:12黄长强井会锁丁达理赖志平
探测与控制学报 2013年4期
蔡 佳,黄长强,井会锁,丁达理,赖志平
(1.空军工程大学航空航天工程学院,陕西 西安 710038;2.西安机电信息技术研究所,陕西 西安 710065;3.广州军区空军装备部,广东 广州 510071)
0 引言
预警机作为空中的指挥所,随着其功能从单一探测到预警、指挥和控制的综合发展,其作用显得日益重要与突出,在未来体系对抗条件下的空战中受到越来越多的重视。但是,预警机本身所携带武器的作战性能并不像战斗机等其他机种那样强大,它在空域中的位置一般离我方的机载探测装置距离很远,这就造成了我方机载传感器量测数据的不准确,相比其他机种对其探测精度并不高,故而对预警机进行目标跟踪的精度就会受到影响。因此,针对预警机目标的特殊机动模式,如何对其进行有效跟踪已成为目标跟踪领域中的一个重点。
目标跟踪是指是为了维持对目标当前状态的估计,同时也是对传感器接收到的量测进行处理的过程[1]。对于机动目标,由于其运动模型未知,并且可能随时间变换,任何一个单一的数学模型都难以描述实际的运动状态,所以在实际问题中常采用交互式多模型算法[2]。交互式多模型算法在运算中引入了多个运动模型,并且各个模型能够并行计算,通过Markov转移概率矩阵来实现模型切换,对每个模型的状态估计按一定的概率加权来输出最终的估计结果,因此在机动目标跟踪问题中得到广泛应用。
卡尔曼滤波算法发展至今很好地解决了交互式多模型目标跟踪的目标状态估计问题[3]。文献[4]采用标准卡尔曼滤波算法进行目标的位置预测,但是它是基于系统模型确定已知的前提;如果系统模型与真实观测值不匹配,那么标准卡尔曼滤波结果可能会发散,文献[5]利用衰减记忆滤波与平方根滤波相结合来分别克服模型误差和计算误差带来的发散;文献[6]利用衰减记忆滤波和多假设跟踪算法对多目标跟踪问题进行研究。但是与其他算法相结合并没有改变其衰减因子为一常值的事实,在探测距离较远量测数据不准确时将会带来跟踪精度不足。本文针对此问题,提出了一种基于指数加权的改进衰减记忆自适应滤波算法,它的衰减因子为指数型系数,能够自适应计算得到。
1 系统模型与算法描述
1.1 系统模型
目标的离散时间系统状态方程为:
式中,Φk,k-1为离散化的状态转移阵,Γk-1为过程噪声驱动阵,Wk为零均值、协方差Qk=diag()的高斯白噪声,它与X0相互独立,有EWk=Qkδkl,Qk为已知的非负定阵,δkl为克罗尼克δ函数。
系统测量方程为:

式中,Hk为测量阵,Vk为零均值、协方差Rk=diag()的高斯白噪声,它与Wk和X0相互独立,有EVk=Rkδkl,Rk为已知的正定阵。
1.2 交互式多模型算法
交互式多模型算法(Interacting Multiple Model,IMM)过程可归纳为以下步骤[7-8]:
步骤1:混合概率及输入交互
式中,j=1,…,r,pij是模型i转到模型j的转移概率,为规一化常数,
步骤2:卡尔曼滤波
对 应 于 模 型Mj(k),以(k-1/k -1),Poj(k-1/k -1)及Z(k)作为输入进行卡尔曼滤波。
步骤3:模型概率更新
其中:
式中,c为归一化常数,Λj(k)为观测Zk的似然函数,υj(k)=Zk-Hk,Sj(k)= Hk+Rk。
步骤4:输出交互
1.3 传统衰减记忆滤波算法
通常情况下,1.2节步骤2采用的方法是标准卡尔曼滤波(Standard Kalman Filtering,SKF),这是一种线性最小方差的估计方法,对目标进行状态估计非常有效,因此在解决目标跟踪问题中得到了广泛应用。但是如果系统的数学模型与噪声的统计模型不准确,不能反映真实的动态过程,使得模型与真实的观测值不匹配,就可能引起滤波发散,这是标准卡尔曼滤波的缺陷。避免这种缺陷的一种途径就是强调新近数据的作用,而逐渐遗忘陈旧数据。传统的衰减记忆卡尔曼滤波(Fading Memory Kalman Filtering,FMKF)就是基于此来扼制滤波发散的一种滤波方法[9]。
根据文献[9],可以得到传统的衰减记忆滤波方程组如下:
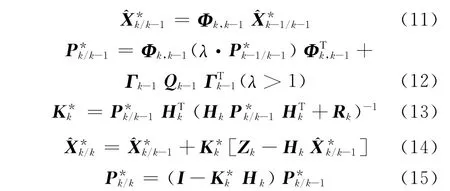
将式(11)和(14)合并,得到式(16):

观察式(16)可见,相比标准卡尔曼滤波,由于引入衰减因子λ且λ>1,衰减记忆滤波使增益变大,因此新近测量值的权重加强;同时使的系数减小,即削弱了陈旧测量值对滤波的影响。
2 基于指数加权的衰减记忆自适应滤波算法
1.3 节描述的传统衰减记忆滤波算法虽然对抑制滤波发散有作用,但是式(12)显示其衰减因子λ为一常值,从统计观点来看,传统算法方程组中的每项系数均为λ,这其实反映了常值衰减记忆滤波算法是基于算术平均的,造成新近测量值对滤波精度的影响力有限。然而在实际应用中,当传感器探测距离较远量测数据不准确时,如果仍然采用上述滤波算法,则将不能满足跟踪精度的指标要求。
因此,为了更能体现新近数据对滤波的影响,本文设计了一个自适应计算的衰减因子λk对传统算法进行改进,在形式上表现为将滤波方程的常值系数替换为一个指数型系数,那么公式中的每项乘以不同的加权系数,这样就得到改进的FMKF算法(Improved FMKF,IFMKF),保证滤波器工作在最佳状态。

观察式(17)可见衰减因子λk满足:1)λk>1,符合常值衰减因子大于1的基本要求;2)λk为指数型增函数,使得新近测量值权重逐渐增大,体现了自适应性的优点。获得自适应衰减因子后,即可将其应用于IMM算法中进行目标跟踪,具体实现分为两步:
1)将自适应衰减因子λk代入式(11)—(15),得到改进后的滤波方程组。其中式(12)变形为(18),其余公式在形式上保持不变。

2)将改进后的滤波方程组应用于1.2节IMM算法的步骤2中,即用改进衰减记忆滤波代替标准卡尔曼滤波,提高对目标的跟踪精度和跟踪效果。
3 仿真分析
3.1 参数设置
预警机常用的机动模式有:跑道机动、圆形机动和∞机动等[10-11],如图1(a)、(b)、(c)所示。
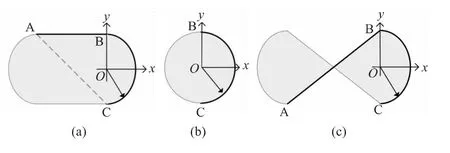
图1 目标机动模式Fig.1 Maneuvering mode
为方便考虑问题,做出以下简化:1)目标的运动模式均可视为直线运动与转弯运动的组合;2)组合而得的机动模式轨迹具有几何上的对称性;3)预警机在某一空域的固定高度上运动。取状态向量为X= [x,˙x,¨x,y,˙y,¨y]T,各分量分别表示目标的位置、速度和加速度。目标运动轨迹如图1(a)所示,考虑到假设2),只研究目标在AB段直线运动,在BC段转弯运动。
和任何基于模型的算法一样,IMM算法只有在它所依赖的模型与目标实际的运动模型更加一致的情况下,它的性能才会更好。一般来说,当选择两到三个与目标可能运动情况相接近的模型进行跟踪时,可以获得很好的跟踪结果[12-13]。基于此,考虑目标状态模型由常加速模型M1和转弯模型M2组合而成。
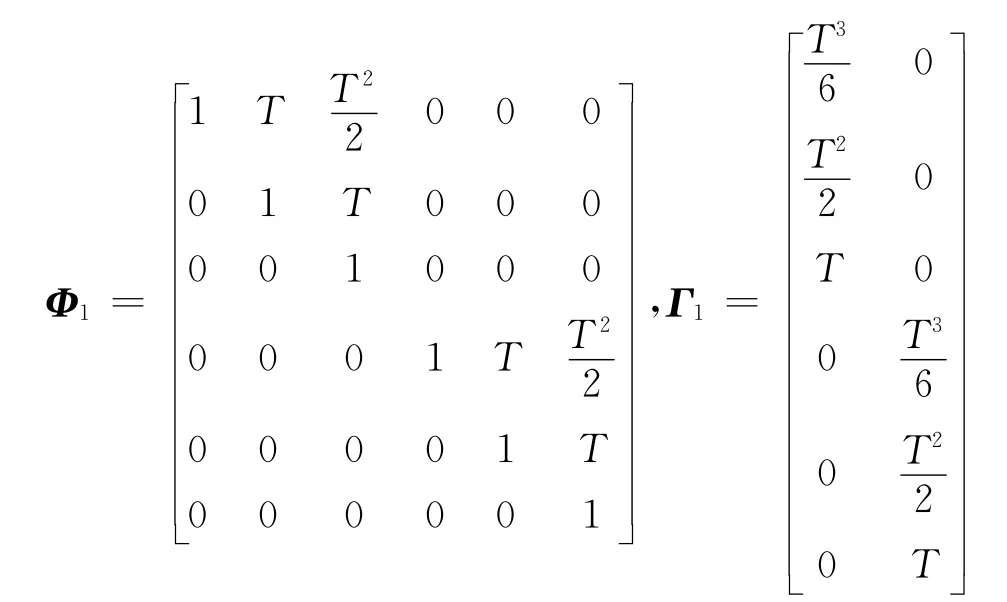
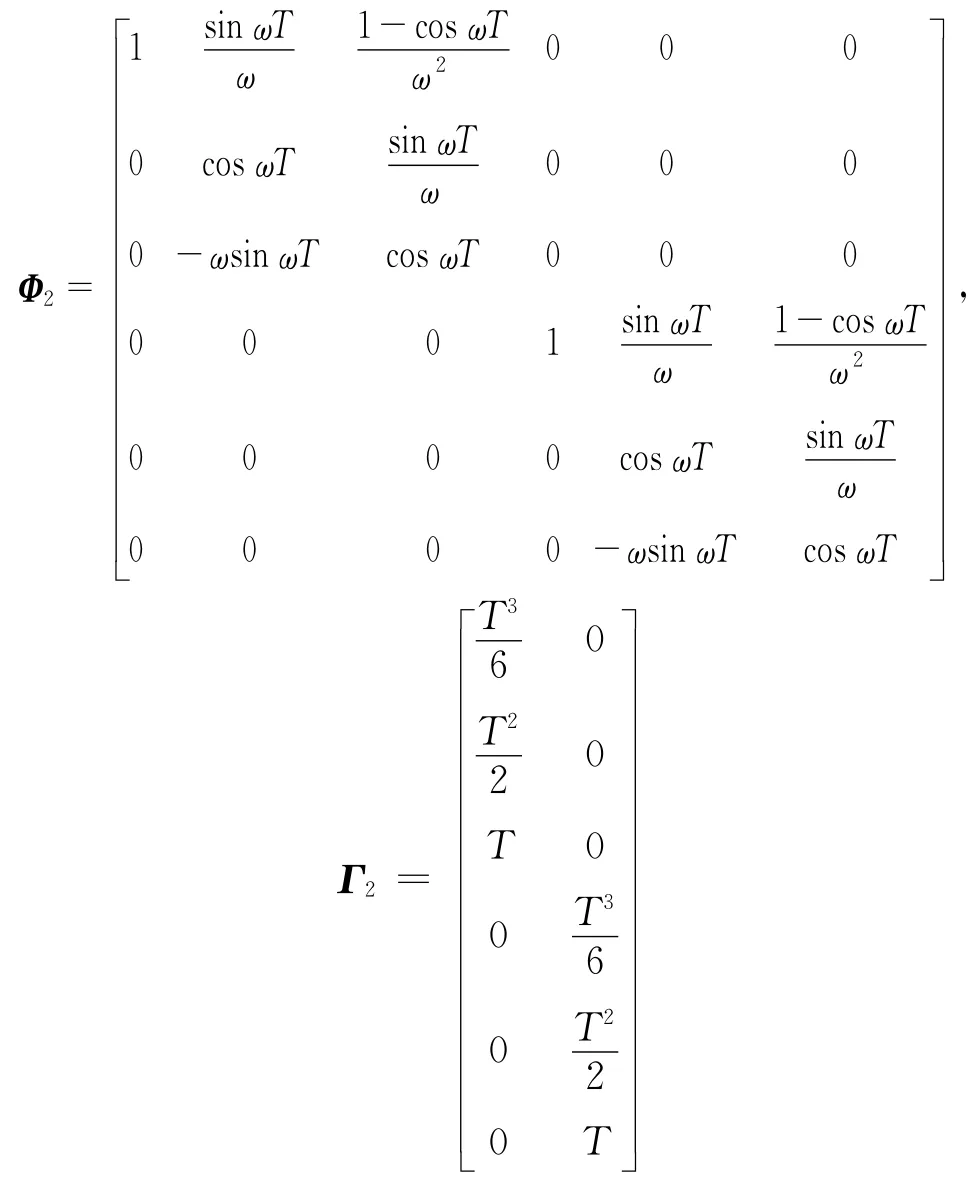
M1:常加速(Constant Acceleration,CA)模型M2:联动式转弯(Coordinated Turn,CT)模型CT运动的特点是目标的角速度ω和速度大小保持不变,而速度方向时刻在变化。
3.2 结果分析
在上述条件下,对预警机机动过程进行100次蒙特卡洛仿真实验,观察IFMKF算法的跟踪效果,并就跟踪误差与SKF及FMKF进行了比较,结果如图2—图4所示。
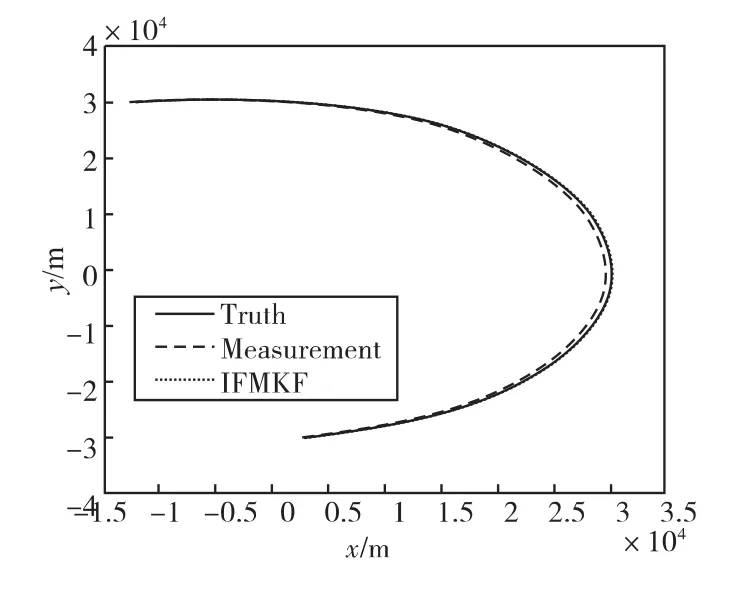
图2 目标跟踪效果Fig.2 Target tracking result
图2所示为目标的真实轨迹和估计轨迹比较,可以看出两条曲线非常吻合,说明采用本文提出的算法可实现对目标的有效跟踪。
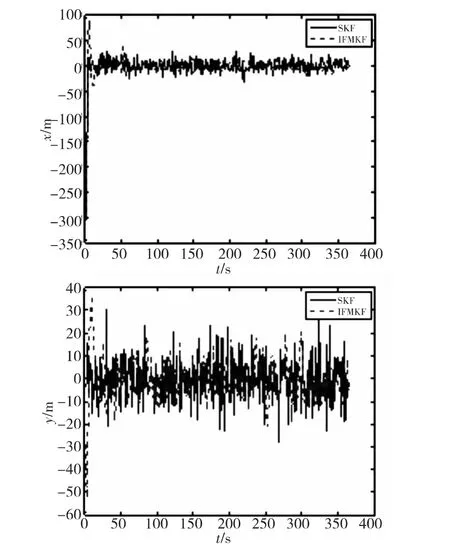
图3 x和y方向均值误差比较Fig.3 Mean error comparison of xand ydirection
图3和图4所示为IFMKF与FMKF及SKF算法在x和y方向的跟踪误差比较。仿真结果表明,IFMKF算法的估计误差比FMKF和SKF都要小,跟踪精度最高。跟踪精度的具体对比见表1。
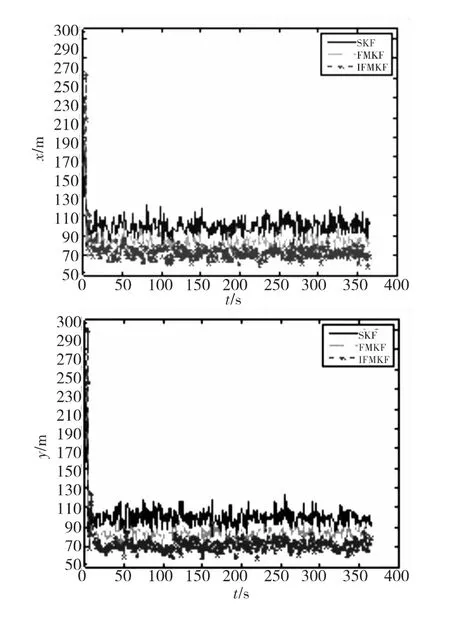
图4 x和y方向均方根误差比较Fig.4 RMS error comparison of xand ydirection
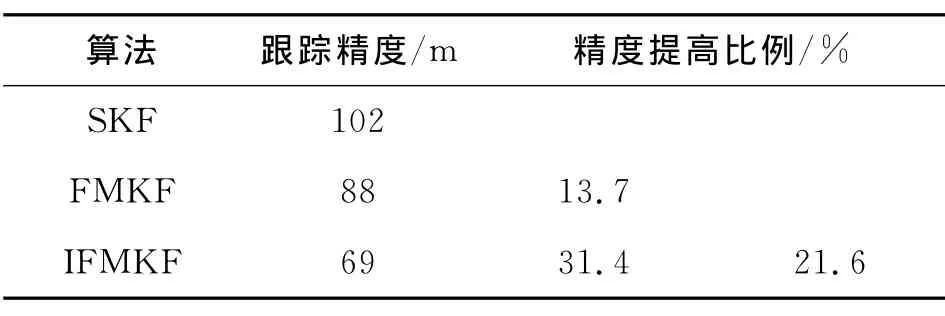
表1 跟踪精度对比Tab.1 Tracking accuracy comparison
由于机载传感器以及跟踪场景的的不同,目标跟踪精度的指标要求是不一样的,对于机载主动传感器而言,本文要求其跟踪精度指标在100m以内。由表1可见:1)SKF算法的跟踪精度最低,IFMKF最高;2)相比SKF算法,FMKF跟踪精度提高了13.7%,IFMKF提高了31.4%,跟踪效果更加显著;3)相比常值衰减记忆滤波算法,本文改进的自适应算法在跟踪精度方面提高了21.6%,不仅验证了该算法的有效性,而且体现了其在更高跟踪精度指标要求下的适用性。其中,自适应衰减因子λk的变化曲线如图5所示。
由图6可见,在目标做匀速直线运动时,M1的概率在这一时段较大,为主要滤波模型;当目标从匀速直线运动转为转弯运动时,主要滤波模型由M1切换至M2。目标当前所处的模型,直接表现为当前的模型概率占优势;而模型之间的切换则应带来模型概率的急剧变化。仿真结果中显示的模型概率能够有效地反映目标当前所处的模型,表明了本文提出的算法能够自适应地选择接近实际运动的模型。
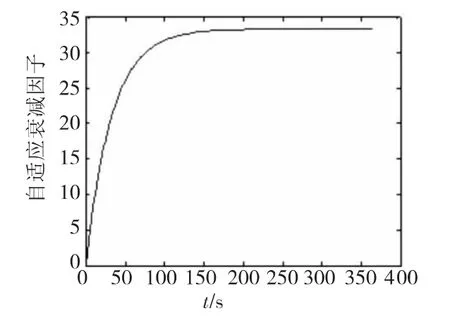
图5 自适应衰减因子变化曲线Fig.5 Adaptive fading factor

图6 模型更新概率曲线Fig.6 Model update probability
4 结论
本文提出了一种基于指数加权的改进衰减记忆自适应滤波算法。该算法中的衰减因子表现为指数型,滤波方程组中的每项乘以不同的加权系数,使得新近测量值的权重逐渐增大,体现了自适应性的优点,然后将改进后的数学方程组应用于交互式多模型算法当中对预警机进行目标跟踪。仿真结果表明采用IFMKF算法的位置估计误差较SKF和FMKF算法明显减小,目标跟踪精度最高,验证了基于IFMKF的交互式多模型目标跟踪算法是有效的。
[1]韩崇昭,朱洪艳,段战胜.多源信息融合[M].北京:清华大学出版社,2002.
[2]Johnston L A,Krishnamurthy V.An improvement to the interacting multiple model algorithm [J].IEEE Transactions on Signal Processing,2001,49(12):2909-2923.
[3]Heemink A W,Segers A J.Modeling and prediction of environmental data in space and time using Kalman filtering[J].Stochastic Environmental Research and Risk Assessment,2002,16(3):225-240.
[4]陈林.一种基于卡尔曼滤波的运动目标跟踪方法[J].舰船电子对抗,2011,34(3):67-70.CHEN Lin.A kind of motive targets tracking method based on Kalman filtering[J].Shipboard Electronic Countermeasure,2011,34(3):67-70.
[5]章飞,周杏鹏,陈小惠.基于衰减记忆滤波的平方根UKF被动目标跟踪算法[J].测控技术,2010,29(4):22-26.ZHANG Fei, ZHOU Xingpeng, CHEN Xiaohui.Square-Root UKF passive target tracking algorithm based on memory attenuation filtering[J].Measurement &Control Technology,2010,29(4):22-26.
[6]刘士建,郭立,刘昌进,等.基于衰减记忆滤波的多假设跟踪算法[J].信号处理,2004,20(4):346-349.LIU Shijian,GUO Li,LIU Changjin,et al.Multiple hypothesis tracking algorithm based on memory attenuated filter[J].Signal Processing,2004,20(4):346-349.
[7]XU M,SHAN X M,XU B G.Maneuvering target tracking using threshold interacting multiple model algorithm[J].Journal of Southeast University,2005,21(4):440-444.
[8]WANG X H,YANG X Y,QIN Z,et al.Hierarchical interacting multiple model algorithm based on improved current model[J].Journal of Systems Engineering and E-lectronics,2010,21(6):961-967.
[9]秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998.
[10]蔡佳,罗继勋,胡朝晖,等.预警机指挥控制系统在编队飞机空战中的算法研究[J].电光与控制,2010,17(6):28-31.CAI Jia,LUO Jixun,HU Zhaohui,etal.Air combat algorithm of aircraft formation under command and control of early warning aircraft[J].Electronics Optics &Control,2010,17(6):28-31.
[11]王国师,李强,代科学,等.基于防空警戒任务的多预警机协同补盲[J].系统工程与电子技术,2012,34(5):941-946.WANG Guoshi,LI Qiang,DAI Kexue,etal.Blind compensation for multi-AWACS cooperation based on aerial defence and warning[J].Systems Engineering and Electronics,2012,34(5):941-946.
[12]江宝安,万群.基于UKF-IMM的双红外机动目标跟踪算法[J].系统工程与电子技术,2008,30(8):1454-1459.JIANG Baoan,WAN Qun.Maneuvering target passive tracking with dual infrared observers using IMM algorithm based on UKF[J].Systems Engineering and Electronics,2008,30(8):1454-1459.
[13]朱安福,景占荣,高田,等.基于UKF的交互多模型算法[J].系统仿真学报,2009,21(3):655-657.ZHU Anfu,JING Zhanrong,GAO Tian,et al.Interacting multiple model algorithm based on UKF[J].Journal of System Simulation,2009,21(3):655-657.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
小哥白尼(军事科学)(2021年5期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2016年9期)2016-11-16
舰船科学技术(2013年12期)2013-08-15
