
一种基于最优的毫米波导引头目标搜索扫描方案的改进
2013-12-10 06:39谷良贤
弹箭与制导学报 2013年3期
王 军,谷良贤,王 博,田 野
(1西北工业大学航天学院,西安 710072;2中国兵器工业第203研究所,西安 710065)
0 引言
一般情况下,自寻的导弹发射后需经过初始段和中制导段飞行才进入目标截获阶段。导弹在初始段和中制导段通常处于程序指令和阻尼回路作用下飞行,制导回路未闭合,由于推力偏心、气动力不对称、阵风以及惯性器件的测量误差等因素影响,导弹实际弹道与理想弹道可能有较大的偏差,该偏差将影响导引头截获目标的概率,导致导弹不能命中目标。
导引头对目标的截获至关重要,对其要求首先是截获概率高,应基本接近1。截获概率的大小不仅与导弹、目标和导引头性能等参数有关,还与搜索扫描方案有关[1]。其次,还要求截获时间短,尤其是对近射程导弹来说,其飞行时间短,目标截获须在几秒内完成。最后要求防止假截获,否则导引头将跟踪错误或跟踪丢失。
文中设计了一个接近最优搜索的导引头扫描方案,用于提高导引头对目标的截获概率。
1 导引头最优搜索
导引头的核心任务是保持对目标的自动连续跟踪测量,输出导弹制导与控制信息。但在其跟踪测量目标之前,应完成搜索和截获任务。
1.1 搜索截获概念
导引头对目标截获的过程中,总是在给定的空域(方位、俯仰、距离和速度等)范围内进行搜索,目的是使目标进入导引头视场内并驻留所需的时间[2]。当导引头的检测分辨单元(天线波束、距离波门、速度门等)搜索到目标并且目标回波能量超过导引头设定的检测门限时,称目标被“截获”。
从搜索截获角度来看,要求导引头波束越宽越好。但是,导引头截获目标后,其主要功能是稳定跟踪并进行制导信息测量,而测量精度与波束宽度成反比,为保证制导精度,要求波束宽度和脉冲宽度都很窄[3]。所以导引头波束宽度必须折中选择,由此带来截获目标困难的问题。
1.2 搜索截获过程概率描述
搜索截获是为尽快地稳定跟踪目标,因此在一定条件下,使导引头截获概率最大、时间最短是设计搜索截获方案的首要准则,称为最优搜索。
“截获”就是目标“落入”导引头波束或波门,并且回波能量超过检测门限,即“检测”到目标。
目标“落入”导引头波束和回波能量超过门限被“检测”均是以概率统计来描述的,称为落入概率和检测概率,所以“截获”也以概率统计来描述,称为截获概率。在假定落入概率和检测概率互相独立的情况下,截获概率为:

其中:Pv为落入概率;Pd为检测概率;Pa为截获概率。
1.3 最优搜索范围
当导引头搜索方式为均匀搜索时,搜索角速度是恒值,则雷达波束在每个位置上的驻留时间相同,可知在各搜索角度位置上的检测概率Pd相同,根据文献[2]:

其中,pv为目标落入导引头搜索范围(在上式中即区间[x1,x2])内的概率密度,显而易见,落入概率随搜索范围增加而增大。
导引头雷达方程为:

其中:Rmax为作用距离;Pav为平均发射功率;A为天线有效面积;σ为目标有效反射面积;k为波尔兹曼常数;T0为常温290K;Fn为接收机噪声系数;E为目标或波能量;N0为噪声功率密度;Ω为搜索范围;T为搜索给定范围Ω所用的时间。
式(3)表明,在导引头其它条件一定的情况下,当要求截获概率一定时,若增大搜索范围,虽然会提高落入概率,但降低了检测概率,且搜索范围增大到一定程度后对于落入概率的进一步提高效果并不显著;或者当要求检测概率一定时,增大搜索范围,会降低截获概率。
因此,当存在弹目相对位置误差及导引头资源一定的条件下,导引头以给定的时间搜索目标时,存在最优搜索范围。但是由于最优搜索范围求解复杂,而且随弹目相对位置偏差改变而改变,因此在工程实际使用中,不应采用最优搜索范围,而应力求截获概率最大化。
1.4 最优搜索方式和扫描方案
对于式(2),由柯西 -施瓦兹不等式可知:

并且,当且仅当 pd(x)=Kpv(x)时,截获概率最大,其中K为常数。因此导引头在给定范围搜索时,要获得最大截获概率,必须控制搜索方式以及扫描规律,使其在此范围上所能达到检测概率在空间的分布与目标在该范围上落入概率的分布形式相同。
2 搜索方式选择
根据文献[5],随着导引头作用距离减小,其指向误差将逐渐增大,即弹目相对位置误差增大。要得到较高的截获概率,就必须保证落入概率满足基本要求。下面以某型导引头指标为例,确定搜索方式。根据给定的导引头指向方位误差σa和俯仰误差 σp,分别按凝视、一维搜索和二维搜索计算落入概率。
1)假设导引头波束角为 ±2°,导引头凝视,仅利用其波束角截获目标,则落入概率与导引头作用距离的关系如表1。

表1 导引头不搜索落入概率与作用距离关系
2)导引头在俯仰方向上不搜索,仅在方位方向上一维搜索,搜索范围按Ωa/σa=4计算,则其落入概率与导引头作用距离的关系如表2。

表2 导引头一维搜索落入概率与作用距离关系
3)若导引头在俯仰、方位按二维搜索,搜索范围按 Ωa/σa=4、Ωp/σp=4 计算,则其落入概率与导引头作用距离的关系如表3。

表3 导引头二维搜索落入概率与作用距离关系
根据表1、表2和表3的计算结果可知,若导引头凝视,则当其作用距离小于4km时,目标落入概率比较低,不能满足要求,不能采用该方法。若导引头在俯仰、方位按二维搜索,只要搜索范围满足Ωa/σa=4、Ωp/σp=4,目标落入概率即满足要求,但是二维搜索方式对导引头的控制与伺服系统提出了很高要求,而且也不容易实现,该方法也不适合采用。若导引头在俯仰方向上不搜索,而在方位方向上进行一维搜索,只要保证导引头的作用距离不小于3km,落入概率可以满足要求。此外,一维搜索方式容易实现,因此在工程使用中大多采用一维搜索方式。
3 接近最优搜索的扫描方案设计
导引头一维搜索方式的扫描规律一般有以下几种:
1)等角速度扫描,即:

其中:ω(t)为导引头扫描角速度,ω0为选定的扫描角速度,且ω0≤ω1max(ωmax为最大扫描角速度)。
2)余弦扫描,即:

其中:ω(t)为导引头扫描角速度,ω0为选定的扫描角速度,满足ω0≤ωmax(ωmax为最大扫描角速度)。
假设导引头的指向角误差为 σa=1.3°,天线扫描范围取为 Ωa=4σa=5.2°,最大扫描角速度取为ωmax=40°/s,这两种扫描规律的导引头天线扫描角、扫描角速度和扫描角加速度见图1~图6。
图1 等角速度搜索方式一个搜索周期内的搜索角度
图2 等角速度搜索方式一个搜索周期内的搜索角速度
图3 等角速度搜索方式一个搜索周期内的搜索角加速度

图4 余弦搜索方式一个搜索周期内的搜索角度
图5 余弦搜索方式一个搜索周期内的搜索角速度

图6 余弦搜索方式一个搜索周期内的搜索角加速度
对于余弦扫描平均角速度为ωave=25.5°/s,扫描周期为Ts=0.81s。对于等角速度扫描平均角速度为ωave=40°/s,扫描周期为 Ts=0.52s,但是该方式扫描角速度不连续,在实际应用中需在拐点处进行平滑处理。虽然上述两种方案实现简单,但是不符合最优扫描,在相同的扫描范围下,截获概率不能实现最大化。
要获得最大截获概率,必须使导引头在搜索空域上所能达到检测概率值在空间上的分布与目标在该空域上落入概率的分布形式相同。根据误差分析,目标在导引头搜索空域上分布服从正态分布形式,因此须将导引头的扫描规律按正态分布形式设计,即符合最优扫描,可实现最大截获概率。
目标相对于导引头天线指向的空间分布的概率密度为:

其中:f(z)为目标在空间上(地面系的Oz轴方向)的分布概率密度,σa为天线方位方向指向误差的均方差。
因此导引头雷达的能量分布函数可以设计为:

其中:g(z)为雷达能量在空间上(地面系的 Oz轴方向)的分布概率密度,E0为雷达在搜索范围内总能量。
又因为雷达能量分布与驻留时间成正比,与搜索角速度成反比,因此扫描规律可设计为:

仍然假设导引头的指向角误差为σa=1.3°,天线扫描范围取为Ωa=4σa=5.2°,最大扫描角速度取为ωmax=40°/s,则根据式(9),计算结果见图 7、图 8。
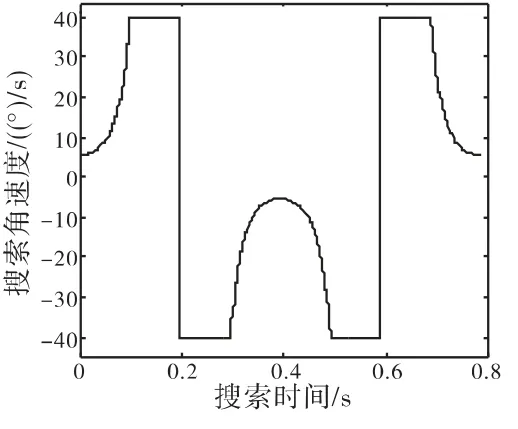
图7 一个搜索周期内的搜索角速度

图8 一个搜索周期内的搜索角度
此时导引头扫描的平均角速度为 ωave=26.4°/s,扫描周期为 Ts=0.79s。
根据以上计算结果可以看出,采用最优扫描方案,若扫描相同的角度范围,扫描周期与余弦方式相比减小2.5%,因此采用上述最优扫描,既可以达到提高截获概率的目的,也提高了搜索效率,同时降低了对导引头的要求。
4 结束语
提高导引头截获概率是寻的制导导弹研制不断追求的目标,但是在工程实践过程中,由于技术水平的限制,不可能完全解决该问题,文中以接近最优设计了一种在工程实践中比较实用的导引头扫描方案,旨在从总体角度提高导引头的截获概率,经过仿真计算和试验证明该方案在条件一定的情况下能提高导引头的截获概率,并且已应用于工程实践中。但是导引头对目标的截获不仅与扫描方案有关,还与发射信号功率、天线增益、接收系统带宽、系统损失、背景杂波以及目标有效反射面积等多方面因素有关,因此要进一步提高导引头的截获概率,必须对上述诸因素综合考虑才能实现。
[1]王军.导引头搜索扫描捕获域分析[J].弹箭与制导学报,2005,25(1):50 -52.
[2]王德纯,丁家会,程望东,等.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006.
[3]向敬成,张明友.毫米波雷达及其应用[M].北京:国防工业出版社,2005.
[4]文仲辉.战术导弹系统分析[M].北京:国防工业出版社,2000.
[5]王军,卢福刚.导引头指向角误差研究[J].兵工学报,2009,30(3):331-332.
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
中学课程辅导·教师通讯(2018年10期)2018-09-04
发明与创新·大科技(2018年2期)2018-03-17
中学生数理化·高一版(2017年3期)2017-07-08
电子制作(2016年1期)2016-11-07
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
