基于概率密度分割的特征约束角点匹配方法
2014-01-14 00:43刘元琳张茂峰张海洋
吉林大学学报(信息科学版) 2014年4期
刘元琳,段 锦,祝 勇,张茂峰,张海洋
(长春理工大学电子信息工程学院,长春130022)
0 引 言
随着科学技术以及计算机的飞速发展,目标识别技术在医疗处理、安全防卫、军事打击、工厂智能处理等现代智能系统中有着广泛应用,而图像匹配技术是目标识别中重要的算法之一[1]。所谓的图像匹配就是将两幅或多幅图像进行匹配叠加的过程,即把在不同时间、不同成像条件下得到的同一目标物体的两幅或多幅图像进行配准[2]。传统的目标匹配识别算法主要有两类:基于图像灰度信息的算法和基于图像特征的匹配算法[3]。
基于图像灰度信息的算法,具有较高的可靠性和较好的鲁棒性,且对存在噪声干扰的图像影响较小。但它存在的主要缺陷是计算量较大,应用范围不广,且不能直接应用于校正图像的非线性变换。基于图像特征的匹配方法主要提取匹配图像中关键的几个特征点(角点)进行匹配。其最大的优点是能将对整个图像进行的各种分析转化为对图像特征的分析,从而大大减小了运算量,对灰度变化、图像变形以及遮挡等都有较好的适应能力[4]。但利用角点的检测同样存在许多问题,针对这些问题许多学者提出了改进方法,从而使基于特征角点的识别方法得到了广泛应用。在文献[5,6]中提出了对角点群聚的优化措施,虽然在许多情况下这些方法较好地改善了角点匹配过程中的不足,但采用均匀思想优化角点的分布或利用分区域方法改善角点多且聚集的现象都无法解决目标角点被错误均匀化的问题。针对该问题笔者提出了一种改进的特征点匹配算法,它以特征角点的概率密度作为区域分割的依据,利用角点的概率密度去除部分伪角点。
1 算法流程
笔者提出的改进算法主要分为:图像预处理、角点检测、角点优化和目标定位4部分。算法的流程图如图1所示。

图1 算法流程图Fig.1 Flow diagram of algorithm
图像预处理主要是为了增强图像的质量,对图像进行灰度变换,并对图像进行去噪处理。笔者综合应用了中值滤波,灰度变换等方法对图像进行了预处理。
角点检测主要利用Harris算法进行特征点的检测(即特征提取)。
角点优化是在Harris算法的基础上,一种以角点间的图像距离作为基本区域划分的主要参考系数,对图像进行均匀化区域划分;另一种是通过角点距离均匀化的思想优化角点分布,然后统计区域中特征角点的概率密度,再通过阈值进行筛选,从而消除图像中的噪声干扰点,减小目标区域的伪角点数。将这种分割方法称为概率密度最大分割法(PDMS:Probability Density Maximum Segmentation)。
目标定位是在上述步骤的基础上,将区域中的特征角点与目标模板中提取出的特征角点利用最大相似度原理进行匹配,最终确定出目标的位置。
2 算法实现
2.1 基于Harris的角点检测算法
基于角点的图像匹配技术的关键就是角点检测的精度、数量以及鲁棒性。Harris算子是目前角点检测中最常用的算法,它是一种基于图像的局部自相关函数分析的算法[5]。
任一图像中某像素点(x,y)在局部偏移(u,v)下的局部自相关函数[5]

其中I(x,y)表示图像灰度函数,w(x,y)为表示各点权值的窗函数,[I(x+u,y+v)-I(x,y)]表示图像灰度的梯度值。
当偏移量很小时,可以将E(u,v)近似地化为

其中H为自相关矩阵,也是一个实对称矩阵,表达式如下

其中Ix和Iy分别表示水平和垂直方向上的图像梯度值,“*”为卷积。
H矩阵的特征值λ1和λ2可近似的表示图像灰度自相关函数的极值曲率。也就是当λ1和λ2都较大时,该点即为角点;当λ1和λ2都较小时,该点处于平坦区域;当λ1和λ2一个较大,另一个较小时,该点处于边缘区。
所以角点强度(响应)函数可表示为

其中det H为H矩阵的行列式,trace H为H矩阵的迹

然后比较提取出的特征角点与其半径为r的圆形区域内其他角点的强度,从而进行非极大值抑制,减少角点的数目,表达式如下[7]

其中Xi是该特征点在图像中的位置(x,y),f表示角点强度,I是以Xi为圆心ri为半径的圆形区域内角点位置的集合,‖·‖是欧式范数算子,c为常数。
利用极大值抑制,即利用一定距离内的角点计算值强度判断是否去除或选定该特征点,对目标特征角点的选定具有一定的利用价值,但该方法没有更好地应用特征角点的群聚特性以及伪角点的分散特性[8,9]。
而利用欧氏距离约束的均匀抑制法,可减少复杂图像的匹配点和误匹配点,但常常会破坏目标角氏与背景伪角点的选取关系,并且该方法没有考虑不同区域间同一个目标被分割的情况[10]。传统的Harris角点检测中,当对角点进行非极大值抑制时,阈值大小的设定几乎完全决定角点的提取效果[11]。而文献[8]提出了一种双阈值法的非极大值抑制的Harris角点检测法,虽然这种方法能很好地解决角点信息丢失和位置偏移的现象,但这种双阈值的方法选取对角点的提取仍存在较大的影响。
笔者通过改进极大值抑制与均匀的欧氏距离方法改进角点的特征约束,即利用检测特征角点的概率密度约束改进角点的分布,使伪匹配点可在检测过程中利用相关匹配系数将其去除,从而大大降低了计算的复杂度。
2.2 改进的角点优化算法
概率密度改进方法主要分为两种。
1)均匀区域筛选法。区域目标检测与背景像素的概率密度比,通过检测图像上某个区域的角点个数与该区域图像像素的比值作为待配准区域的判定,该方法同样无法克服区域划分时将目标分割的问题。如图2所示,以角点间的图像距离作为基本区域划分的主要参考系数,对图像进行均匀化区域划分。
2)概率密度法。如图3所示,检测判断是以某个检测角点的像素作为中心,然后向外扩散对角点进行检测并统计,对检测后的图像进行概率密度区域划分。最终利用划分后的区域中的角点概率密度作为待匹配区域选定的参考值,结合上述均匀化方法,将区域外的特征点判定为伪角点并将其去除。
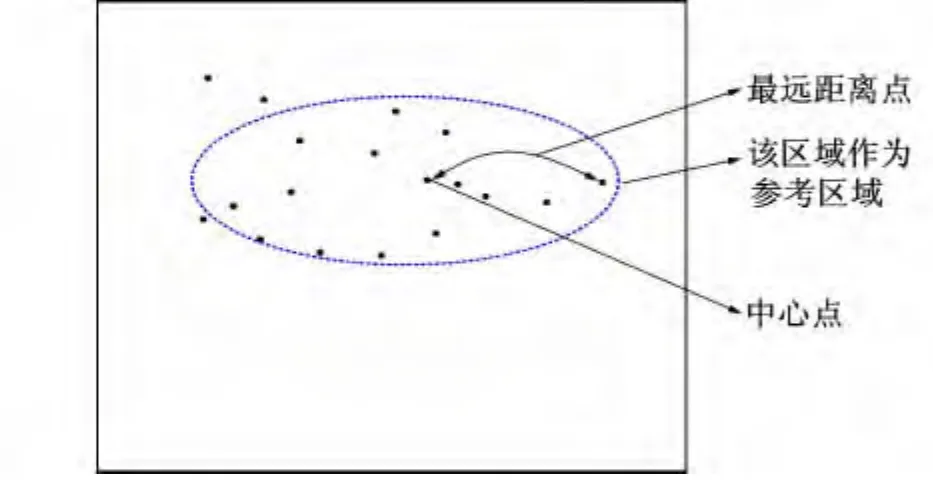
图2 均匀区域筛选原理Fig.2 Principle of uniformly regional screening
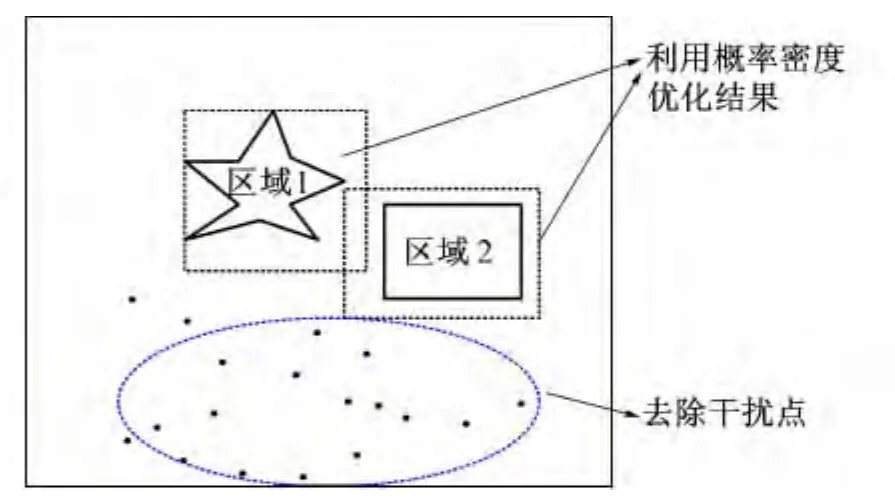
图3 概率密度原理Fig.3 Principle of probability density

其中‖·‖是欧式范数算子,其值等于相邻角点间的最小距离。利用欧氏范数判断角点是否属于同一区域,计算同一区域内角点密度的统计值Pi。
利用

判定最大密度区域,将其设定为最初的匹配区域点集。运用区域概率密度原理的步骤如下。
①利用角点检测算子检测出图像的全部角点,通过设定一个较大区域的阈值max_Dis圈定角点区域。假设目标预计大小为Width×Height,笔者设定目标区域为(Width+10)×(Height+10)。为避免区域重叠还需设定最小区间阈值min_Dis。
②检测角点间最大的欧氏范数值,通过它与设定的阈值max_Dis的比较分出不同的区间,最终利用概率密度公式计算不同区域间的概率密度Pi,并从大到小依次排列该值及对应的区域。
③去除概率密度低于一定阈值的区域,并标注概率密度大于或等于阈值的区域,将这些区域作为匹配的参考点。
3 实验结果与数据分析
图4是基于Microvision维视图像的采集摄像机MV-1300UM所得到的实验图像。分辨率为512×512像素,灰度值为8位。
实验环境的CPU主频为2.5 GHz,内存2 GByte,编译工具为VC++6.0,采用Harris对两幅图像进行角点检测。
笔者是对目标在图像中心区域的情况进行匹配实验,在检测的角点匹配区域中利用匹配角点周围像素原理定位目标。该实验都是在不同飞行场景的序列图像的基础上,分别对单幅图像以及序列图像进行实验。下面先对单帧图像进行实验。
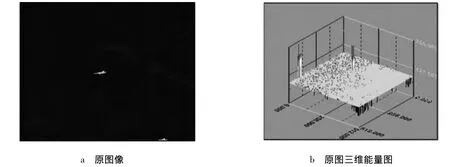
图4 检测原图像及其三维能量图Fig.4 Original detection image and three-dimensional energy diagram
从图4可知,原图像的三维能量图下方反映出图像具有较多的干扰点,由于图像区域检测的角点常具有分散且较多的特点,所以干扰点对角点检测存在较大的影响。能量图上方主要集中了较明显伪目标或真目标的待检测点,对目标的匹配具有重要的参考价值。
为得到合理的检测点,利用概率密度约束条件达到去除离散点的效果。在2.1节中提及的非极大值抑制结果与笔者提出的概率密度检测结果对比图如图5所示。
通过图5可以明显看出,非极大值抑制的检测角点个数要明显多于概率密度检测法,概率密度检测剔除了很多离散的干扰点,大大降低了后续目标匹配的复杂度。为验证概率密度检测法的准确性,本实验分别用了3种不同飞行场景的序列图像,对每组图像的50帧图像进行了检测,检测数据如表1所示。
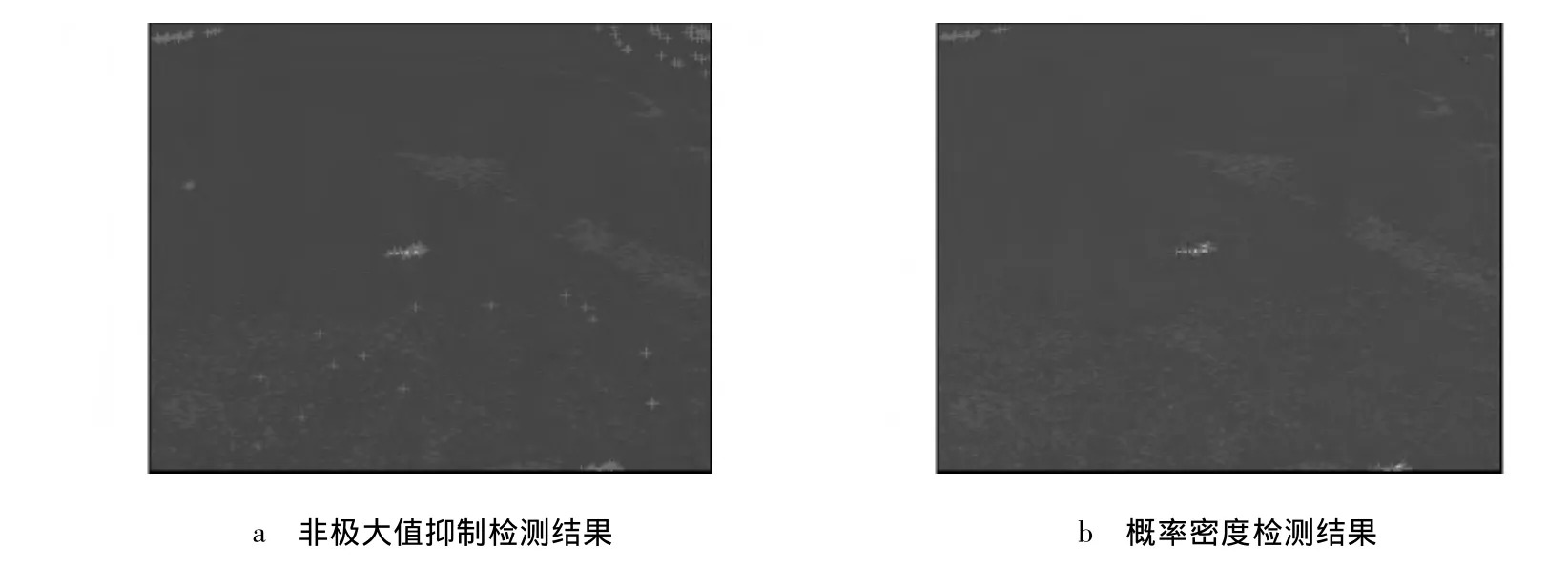
图5 角点检测结果对比图Fig.5 Comparison of corner detection results

表1 50帧序列图像的平均检测结果Tab.1 The average test results of 50 image sequences
利用匹配算法进行匹配的结果图如图6所示。
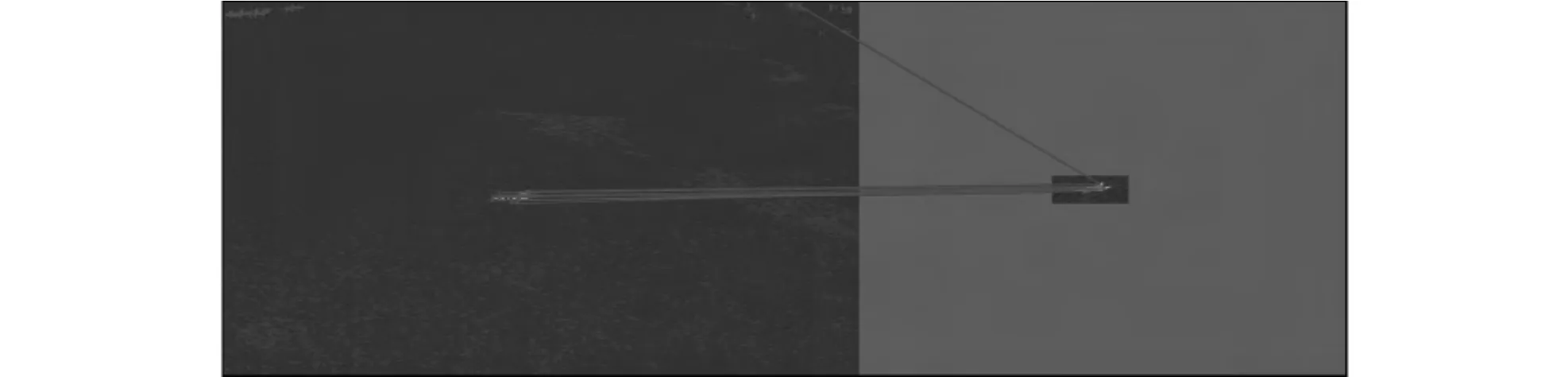
图6 目标定位结果图Fig.6 Results of target location
通过对原图目标区域截图的方式对目标区域进行定位匹配,使匹配结果更加清晰可见(见图6)。通过检测的角点对目标进行匹配具有较高的准确性,可以有效去除较多的误匹配点,同时也存在少量误匹配点。
分别用两种概率密度改进方法对同一图像进行目标检测,检测对比结果如表2所示。通过数据分析可得,概率密度约束法相对均匀约束法而言,误点数少,误定位率低,对目标的检测准确性更高,并且在总体时间上大大减少了定位时间,从而提高了匹配速度。

表2 定位数据对比Tab.2 Comparison of the locating data
图7是序列图像的角点匹配跟踪定位结果图。
序列图像的实验结果表明:笔者提出的概率密度约束法可以得到较稳定的特征角点,并且特征角点集中分布在较合理的区域。在检测速度和稳定性上该算法都有较明显的提高,改善了目标定位的实时性与准确性,并且更适合移植在识别算法中。
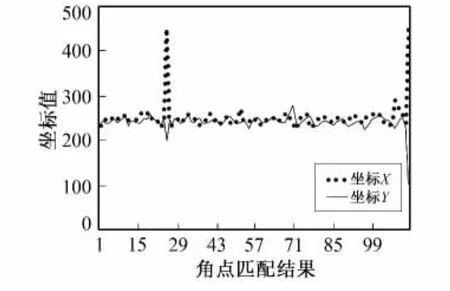
图7 序列图像定位结果图Fig.7 Locating results of sequence image
4 结 语
通过实验对比分析,改进的概率密度约束检测算法相对于非极大值抑制检测算法而言去除了大量的伪角点和零散的干扰噪声点。比较笔者提出的两种改进算法,从定位数据上分析,概率密度约束算法在检测初始点个数上就明显优于均匀约束,在定位时间上,概率密度约束算法也有较明显的优势,且检测准确率较高,误匹配点少。
大量实验结果表明,改进的概率密度约束算法在特征角点的检测上还具有较高的稳定性,为图像的目标识别奠定了坚实的基础。可以有效地去除图像中的噪声干扰点,大大减小目标区域的误判率,使目标的检测具有较高的稳定性和实时性。
[1]戴涛,朱长仁,胡树平,等.图像匹配技术综述[J].数字技术与应用,2012(3):174-175,177.DAI Tao,ZHU Zhangren,HU Shuping,et al.Survey of Image Matching Technique[J].Digital Technology and Application,2012(3):174-175,177.
[2]朱俊,任明武,杨章静,等.基于角点检测的快速匹配算法[J].南京理工大学学报:自然科学版,2011,35(6):755-758.ZHU Jun,REN Mingwu,YANG Zhangjing,et al.Fast Matching Algorithm Based on Corner Detection [J].Nanjing University of Technology:Natural Science Edition,2011,35(6):755-758.
[3]王宏力,贾万波.图像匹配算法研究综述[C]∥全国第19届计算机技术与应用学术会议(CACIS·2008)论文集.合肥:微型计算机应用协会,2008:418-423.WANG Hongli,JIA Wanbo.Survey of Research on Image Matching Algorithm[C]∥The 19th National Computer Technology and Applications Conference(CACIS·2008)Proceedings.Hefei:Microcomputer Applications Society,2008:418-423.
[4]邹华荣.图像匹配中的性能优化[J].电脑知识与技术,2009,29(5):8260-8264.ZOU Huarong.Image Matching Performance Optimization [J].Computer Knowledge and Technology,2009,29(5):8260-8264.
[5]葛永新.图像匹配中若干关键问题的研究[D].重庆:重庆大学计算机学院,2011.GE Yongxin.Study on Some Key Issuses in Image Matching[D].Chongqing:College of Computer Science,Chongqing University,2011.
[6]NIKHIL NAIKAL ALLEN,YANG Y,SHANKAR S.Informative Feature Selection for Object Recognition via Sparse PCA[C]∥Computer Vision(ICCV),2011 IEEE International Conference on.Barcelona:[s.n.],2011:818-825.
[7]朱志恩.中值滤波技术在图像处理中的应用研究[D].沈阳:东北大学信息科学与工程学院,2008.ZHU Zhien.Application Research on Median Filtering Techniques in Image Processing[D].Shenyang:College of Information Science and Engineering,Northeastern University,2008.
[8]毛雁明,兰美辉,王运琼,等.一种改进的基于Harris的角点检测方法[J].计算机技术与发展,2009,19(5):130-133.MAO Yanming,LAN Meihui,WANG Yunqiong,et al.An Improved Corner Detection Method Based on Harris [J].Computer Technology and Development,2009,19(5):130-133.
[9]HANG Xin,JI Xiuhua.An Improved Harris Corner Detection Algorithm for Noised Images[J].Advanced Materials Research,2012,1566(433):6151-6156.
[10]WU Yanhai,LI Jiaxin,ZHANG Fangni,et al.The Improved Corner Detection for Video Text Positioning Algorithm [C]∥Information Technology Applications in Industry.Switzerland:Trans Tech Publications,2013:1523-1526.
[11]周龙萍.基于改进的Harris算法检测角点[J].计算机技术与发展,2013(2):11-14.ZHOU Longping.Corner Detection Based on Improved Harris Algorithm [J].Computer Technology and Development,2013(2):11-14.
猜你喜欢
数学学习与研究(2020年15期)2020-11-28
电子技术与软件工程(2018年10期)2018-07-16
计算机测量与控制(2017年6期)2017-07-01
电子科技(2016年12期)2016-12-26
系统工程与电子技术(2016年4期)2016-08-24
数学年刊A辑(中文版)(2015年1期)2015-10-30
河北建筑工程学院学报(2015年2期)2015-04-29
振动工程学报(2015年2期)2015-03-01
集美大学学报(自然科学版)(2015年1期)2015-02-28
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10