基于继电反馈的PID参数自整定
2014-02-10 07:01韩震宇
机电工程技术 2014年7期
侯 洪,韩震宇
(四川大学,四川成都 610065)
基于继电反馈的PID参数自整定
侯 洪,韩震宇
(四川大学,四川成都 610065)
针对PID参数难以整定的不足,提出一种基于继电反馈的PID自整定方法。该方法利用继电反馈原理对PID参数进行自整定,从而提高了参数整定的灵活性。给出了基于任意相位裕度的PID参数自整定公式,并进行了仿真实验验证。
继电反馈;PID;参数整定;相位裕度
PID控制方法算法简单,鲁棒性好,而且不依赖于被控对象的精确模型,因而成为目前工业控制中运用广泛的控制方法[1-2]。但PID参数本身整定困难,而且所整定的某组参数一般只适用于一种工况。因此,实现PID控制器参数自整定具有重要意义。
Astrom与Hagglund共同提出了一种以继电非线性环节为核心的PID控制器参数自整定方法[3]。该方法不需要过程的先验知识,可以自动地从被控对象的频率响应中抽取信息,进而整定PID控制器的参数。行系统临界信息获取,通过继电器发出继电激励信号,从而由系统的响应曲线来计算出该系统的振荡频率和振荡幅值,然后由获得的临界信息并根据确定的整定公式整定PID参数;控制状态是采用整定的PID参数来控制系统。如果系统的测试条件发生变化,则需要重新回到测试状态进行测试,测试完成后在回到控制状态。
1 继电反馈整定法的基本原理
继电反馈控制系统的结构框图如图1所示。图中r(t)是参考信号,在继电反馈系统中通常目标值被设为0;e(t)是偏差;u(t)是被控对象的输入;y(t)是被控对象的输出。
继电反馈整定法是在被控系统中设置两种状态:测试状态和控制状态。测试状态的作用是进

图1 继电反馈控制系统
在继电反馈测试状态下,被控系统只要至少具有-π的相位滞后就可以产生临界振荡,这样就可以获得临界信息,然后应用选定的整定公式来进行控制器参数整定[3]。
2 继电器特性的选择
为了克服外部干扰的影响,在采用继电反馈方法进行系统临界信息获取时,需要为被控系统设定合理的继电器特性值。
理想继电特性环节对噪声反映及其灵敏,因此该继电特性不适合用于存在有色噪声或强白噪声的工业现场[3]。用一个对称的带滞环的继电器(如图2所示)取代理想继电器是有利的,这样的系统对噪声的灵敏度会减小。同时,当被控对象的Nyquist曲线直接从第三象限穿越负虚轴到第四象限时,采用理想继电环节就不会形成极限振荡环,而采用具有滞环的继电环节能解决这样的问题。

图2 带有对称滞环的继电环节
在确定选用滞环继电环节后,就需要确定其的两个参数:滞环宽度ε和继电幅值u。在继电自整定法中,滞环宽度ε的大小将影响等幅振荡的幅值和频率,从而对PID控制器参数的整定产生重要的影响。同时,滞环宽度ε和继电幅值u之间存在着一种不等式的约束关系,如果两者不满足这种关系,也会使整定结果不理想,甚至造成参数整定失败。大量仿真研究表明,滞环继电器特性选择应遵循如下原则[4]:
(1)滞环宽度ε的选定:设外界干扰噪声的幅值为Nm,则ε必须大于该噪声的最大幅值,即ε≥nNm,n=2~10,以保证被控系统实现稳定的等幅振荡;
3 基于任意相位裕度的PID控制器参数整定法ϕ
传统的PM法的继电滞环特性中的滞环宽度ε和期望的相位裕度ϕm存在一种确定的函数约束关系[1,5],一旦给定了确定的相位裕度ϕm,那么与之相应的滞环宽度ε也就确定了,这极大地限制了继电特性参数的合理性和自由性。
鉴于PM法的缺陷,本文采用了一种基于任意相位裕度的PID参数自整定方法,通过合理地自由地选择滞环继电特性参数,得到更佳的振荡参数以及更准确的临界信息,从而获得更优的PID控制器参数。如图3所示,该方法先通过继电反馈测试,提取系统的临界信息,然后通过改变PID参数值,使Q点移动到任意相位裕度的单位圆周上的P点[6],而不仅仅是和单位圆周的交点S,从而提高控制品质。
滞环继电特性的描述函数的负倒数为:

图3 基于任意相位裕度的PID参数自整定

设被控对象的传递函数为Gp(s),PID控制器的传递函数为Gc(s)。
测试模式下,由图3,可得:

其中,wc为被控对象等幅振荡的频率。
控制模式下,系统的开环传递函数为∶

与此对应的开环频率特性为∶
由图3及式(4)可得

设任意相位裕度为ϕm,工业实际中相位裕度一般取值为30°~60°,则单位圆周上P点的坐标为:

在选定的滞环继电环节下,由继电反馈实验,得Q点坐标为:

式(2)得


由余弦定理,得

其中ρ为常数,通常取值为2~4。
由式(5)、(8)和(9),得
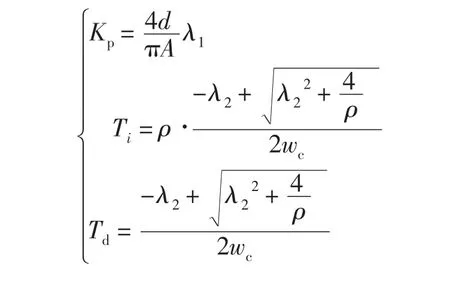
综上各式,得基于任意相位裕度的PID控制器参数整定公式为:

4 仿真研究
工业控制中常用的模型为一阶惯性加延迟模型,所以选取被控对象的传递函数为来进行Matlab/Simulinlk仿真实验。
仿真参数:滞环继电特性ε=0.1,d=2;系统参考值y(t)=1,常数 ρ=4。选取期望的相位裕度为50°进行PID参数整定。
测试模式下,求得系统临界信息为:A= 1.05,wc=14.96。
当ϕm=50°时,利用整定公式,求得:
Kp=1.728 7,Ti=0.056 0,Td=0.014 0。
以此参数设计PID控制器,控制模式下的响应曲线如图4所示。

图4 PID参数整定后的系统输出曲线
由图4可知,通过继电反馈实验进行的PID参数整定后,被控系统的稳定性取得了很好的效果。
5 结束语
基于继电反馈的PID参数自整定,不需要系统的先验知识,就可以容易地实现PID控制器的参数自整定,并取得良好的控制效果。同时本文的方法可以基于任意相位裕度进行PID参数整定,一方面使滞环继电特性的选择更加自由,另一方面也提高了PID参数整定的灵活性,增强了整定方法对系统的适应性。
[1]何芝强.PID控制器参数整定方法[D].杭州:浙江大学,2005.
[2]丁鹏,姚平喜.基于Matlab的无刷直流电机Fuzzy-PID控制研究及其建模仿真[J].机电工程技术,2012(2):10-13.
[3]潘帅.基于继电反馈的PID自整定控制[D].上海:上海大学,2009.
[4]叶岚.基于继电反馈的PID控制器的参数整定[D].上海:上海交通大学,2007.
[5]陈福祥,杨芝雄.PID调节器自整定的PM法及其公式推导[J].自动化学报,1993,19(6):736-740.
[6]柴天佑,张贵军.基于给定的相角裕度和幅值裕度的PID参数自整定新方法[J].自动化学报,1997,23(2):167-172.
The PID Parameters Self-Turning Based on Relay Feedback
HOU Hong,HAN Zhen-yu
(Sichuan University,Chengdu610065,China)
In view of the drawback of the PID parameter tuning,this paper proposes a PID parameters tuning method based on relay feedback.The method is applied on the basis of relay feedback.,and the flexibility of parameter turning is improved.In the paper,the formula of PID parameters turning based on any phase margin is proposed,and verified by simulink.
relay feedback;PID;parameter turning;phase margin
TP273
A
1009-9492(2014)07-0063-03
10.3969/j.issn.1009-9492.2014.07.019
侯 洪,男,1989年生,四川巴中人,硕士研究生。研究领域:现代控制工程及计算机应用。
(编辑:向 飞)
2014-01-08
猜你喜欢
环球时报(2020-08-11)2020-08-11
铁道通信信号(2020年8期)2020-02-06
机电工程技术(2018年10期)2018-12-06
电子制作(2016年23期)2016-05-17
电测与仪表(2016年2期)2016-04-12
核科学与工程(2015年2期)2015-09-26
电测与仪表(2015年5期)2015-04-09
电测与仪表(2014年15期)2014-04-04
自动化博览(2014年10期)2014-02-28
河南科技(2014年15期)2014-02-27